9- Navigation (motoplaneurs)
Modèle en boucle détecté : 9-1 Bases de la navigation (motoplaneurs)
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Magnétisme et compas
Le compas est un instrument de bord permettant de mesurer la direction en utilisant le champ magnétique terrestre. Son fonctionnement est similaire à celui d'une boussole. C'est un instrument simple, mais les limitations de la mesure grâce au champ magnétique sont multiples :
- Le champ magnétique terrestre n'est pas aligné avec l'axe de rotation de la terre. Le compas indique les directions par rapport à la direction du pôle Nord magnétique, qui n'est pas au même endroit que le pôle Nord géographique. On dit que la différence entre les deux directions magnétiques et géographiques est la déclinaison magnétique.
-
 Déclinaison magnétique. Le compas indique le pôle Nord magnétique.
Déclinaison magnétique. Le compas indique le pôle Nord magnétique.

- Le Nord magnétique bouge notablement en 6 à 12mois. La déclinaison doit être mise à jour régulièrement. Des cartes spécifiques présentent la déclinaison en fonction de chaque position sur terre. Les lignes qui joignent les endroits d'égale déclinaison sont appelées lignes isogones. En France et à notre époque, par chance, la déclinaison est négligeable (proche de 0°).
-
 Évolution de la déclinaison entre 1590 et 1990 en fonction de la position sur la Terre, par représentation des lignes isogones. Cliquer pour voir l'animation.
Évolution de la déclinaison entre 1590 et 1990 en fonction de la position sur la Terre, par représentation des lignes isogones. Cliquer pour voir l'animation. -
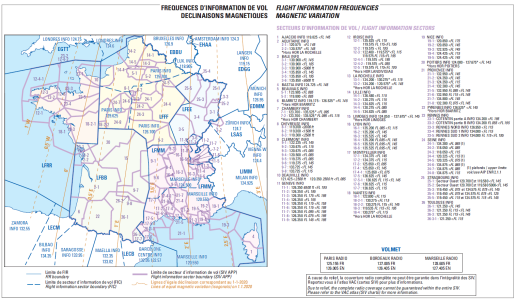 Lignes d'égale déclinaisons magnétiques (les isogones) en France en 2020 (en orange clair). Service de l’Information Aéronautique - Données originales téléchargées sur https://www.sia.aviation-civile.gouv.fr, mise à jour du 26 mars 2020.
Lignes d'égale déclinaisons magnétiques (les isogones) en France en 2020 (en orange clair). Service de l’Information Aéronautique - Données originales téléchargées sur https://www.sia.aviation-civile.gouv.fr, mise à jour du 26 mars 2020.

- Le compas est instrument imparfait. Il n'indique pas parfaitement le Nord magnétique. Ceci est dû au compas lui-même mais aussi à l'installation dans l'aéronef. On dit que cette erreur est la déviation. Cette erreur dépend de la direction qu'il indique. Une table de correction est disponible à proximité immédiate du compas.
-
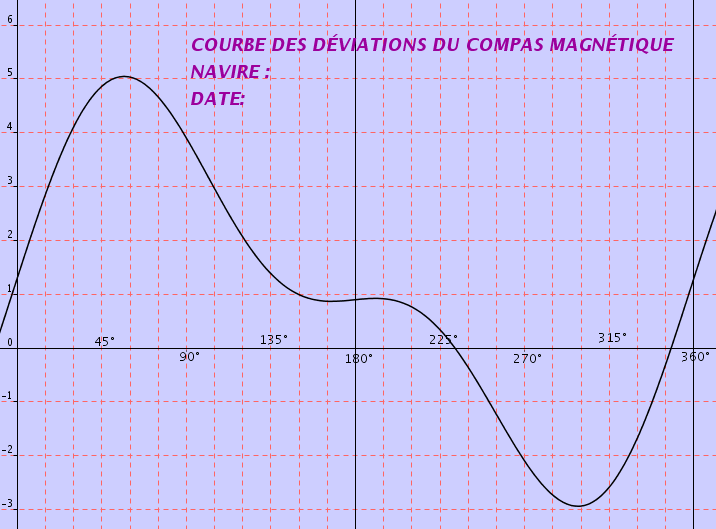 Courbe de déviation en fonction des directions mesurées pour un compas maritime.
Courbe de déviation en fonction des directions mesurées pour un compas maritime. -
 Le cap compas indiqué est de 45°. La déviation indiquée par la table (en rouge) est entre -2° et -5°. Le cap magnétique est donc de l'ordre de 42°.
Le cap compas indiqué est de 45°. La déviation indiquée par la table (en rouge) est entre -2° et -5°. Le cap magnétique est donc de l'ordre de 42°.


Afin d'obtenir la vrai direction, les erreurs de déclinaison et déviation doivent être retirées par calcul :
-
 Correction de la déviation et de la déclinaison après lecture du cap compas. Dans l'autre sens, procéder aux correction en inversant le signe.
Correction de la déviation et de la déclinaison après lecture du cap compas. Dans l'autre sens, procéder aux correction en inversant le signe.

Le compas mesure la direction du champ magnétique là où il se trouve. Tout éléments qui génère un champ magnétique peut l'influencer, il en résultera une indication de direction très erronée. Le pilote doit prendre les précautions nécessaires pour garantir la bonne indication du compas :
- un aimant placé à proximité d'un compas : des aimants sont présents dans les casques utilisé dans les aéronefs, les téléphones...
- les systèmes électriques de l'aéronef génèrent divers champs magnétiques dû à la circulation du courant électriques dans les câbles. Le fonctionnement de certaines servitudes électriques peut donc influencer le compas.
- les masses métalliques ferromagnétiques, même sans être des aimants, posent problèmes. Un stylo qui possède un corps métallique à proximité immédiate d'un compas rend son indication fausse.
Enfin, le compas indique une valeur correcte en ligne droite en l'absence de turbulence importante. Il ne faut pas prendre en compte l'indication d'un compas :
- lors d'un virage;
- lors de turbulences importantes.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Cartes
Une carte présente des informations en fonction de la position considérée. En aéronautique, ces informations concernent les repères visibles, les angles, les distances, les informations sur l'espace aérien...etc. Il est nécessaire d'appréhender les codes de conception et de lecture des cartes pour une utilisation correcte.
Le type de projection cartographique
La projection cartographique est un ensemble de techniques permettant de représenter une surface non plane (surface de la Terre, d'un autre corps céleste, du ciel, ...) dans son ensemble ou en partie sur la surface plane d'une carte. L'impossibilité de projeter le globe terrestre sur une surface plane sans distorsion explique que diverses projections aient été inventées, chacune ayant ses avantages :
- La projection de Mercator : C'est une projection cylindrique. Les méridiens et les parallèles sont des droites perpandiculaires qui quadrillent le plan. Cette projection conforme conserve les angles (ce qui permet de reporter directement sur la carte les angles mesurés au compas, et vice-versa) mais ne conserve ni les distances, ni les surfaces (l'échelle de la carte variant avec la latitude). Sauf le long de l'équateur. Une ligne droite sur une carte de Mercator ne représente pas la distance la plus courte en réalité. C'est en revanche une ligne d'azimut constant (c'est-à-dire une loxodromie), particulièrement utile pour naviguer à cap constant, même si le trajet ainsi défini n'est généralement pas sur un grand cercle et n'est donc pas le chemin le plus court.
-
 Projection cylindrique projection Mercator.
Projection cylindrique projection Mercator. -
 Exemple de projection cylindrique avec déformation des distances importante au niveau des pôles.
Exemple de projection cylindrique avec déformation des distances importante au niveau des pôles.


- La projection conique conforme de Lambert : C'est une projection conique. Les méridiens sont des droites convergentes en un point, les parallèles sont des cercles concentriques autour de ce même point. Elle conserve également les angles. Elle conserve les distances sur le parallèle de référence. Il est donc particulièrement intéressant d'utiliser une projection de Lambert ayant son parallèle de référence sur la zone à exploiter. A proximité du parallèle de référence, une ligne droite sur une projection de Lambert représente la distance la plus courte en réalité (c'est-à-dire une orthodromie).
-
 Projection conique type projection de Lambert.
Projection conique type projection de Lambert. -
 Exemple de projection conique.
Exemple de projection conique.


Les cartes utilisées par le pilote planeur
- La carte permet de représenter les éléments visibles au sol. En France, l'IGN fourni diverses cartes. Ces cartes sont par exemple disponibles en version numérique sur la plateforme Géoportail. L'expérience montre que pour un vol en planeur, une carte avec représentation schématique des éléments facilement identifiables en vol est la plus adaptée.
- La carte permet également de présenter sous forme graphique une partie des informations aéronautiques présentes dans les AIP (Aeronautical Information Publication en anglais) : aérodromes, espaces aériens, fréquences radio, systèmes de radionavigation...etc
Divers organismes proposent des cartes spécifiques à l'usage aéronautique pour différents besoins. En France, c'est principalement le SIA (Service de l'Information Aéronautique) qui éditer les cartes. En partant de la plus grande échelle, les cartes régulièrement utilisées pour le vol en planeur sont :
- La carte du SIA au 1/1 000 000ème : utilisée principalement pour de la radionavigation en route. Elle couvre l'espace du sol au FL195. Disponible en version numérique sur le site web du SIA
- La carte du SIA au 1/500 000ème : utilisée principalement pour de la navigation en route en vol à vue. Elle couvre l'espace du sol au FL115 (ou 3000ft ASFC, le plus élevé des deux). Disponible en version numérique sur Géoportail.
- Les cartes VAC (Visual Approach Chart en anglais) : Il s'agit d'une présentation de l'aérodrome dans son environnement. On y trouve une carte détaillée de l'aérodrome, le sens du tour de piste, ainsi que d'autres indications utiles pour y atterrir en vol à vue. Disponible en version nuémrique sur le site web du SIA
- D'autres types de cartes qui émanent d’initiatives privées ou associative pour répondre à un usage particulier.
-
 Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail. -
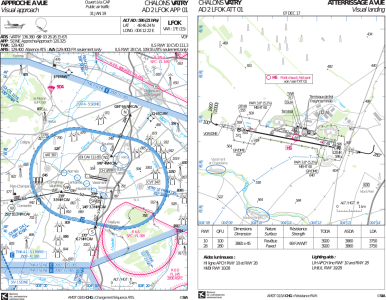 Carte VAC de Chalons Vatry. Source SIA
Carte VAC de Chalons Vatry. Source SIA


Les cartes aéronautiques sont réalisées selon un cahier des charges précis définie par l'annexe 4 de l'OACI. Cette annexe est disponible en lecture sur la librairie électronique de l'OACI. Les cartes sont mises à jour régulièrement, tous les 6 ou 12 mois.
La légende de la carte du SIA au 1/500 000ème (version 2021 disponible ici) est disponible sur Géoportail (icône "information de la couche > afficher la légende). Les symboles principaux doivent être connus du pilote de planeur. liste non-exhaustive :
- Aérodrome avec bande en herbe ou piste en dur
- Les chiffres simples sans décimales indiquent des altitudes
- Les chiffres entre parenthèses indiquent des hauteurs
- Les chiffres à trois décimales indiquent des fréquences VHF pour la radiocommunication
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
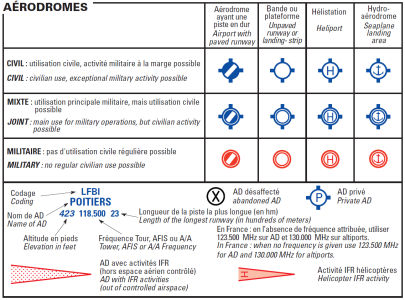 Symboles détaillant les aérodromes
Symboles détaillant les aérodromes -
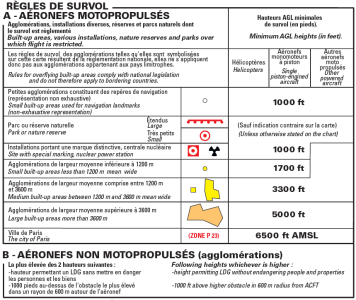 Symboles détaillant les villes et rappelant les règles de survol
Symboles détaillant les villes et rappelant les règles de survol


Exploitation des cartes
De la carte à la réalité : Mesure de la direction et de la distance
- La direction se mesure grâce à un rapporteur. L'objectif est de mesurer l'angle que forme la route avec le méridien le plus proche. Une route à l'Est vaut 90°, au Sud 180°, à l'Ouest 270°. Une prudence particulière doit être prise pour ne pas confondre le sens de la route, ce qui occasionnerait une erreur de 180°.
- La distance se mesure grâce à une règle graduée entre deux points. En considérant que l'erreur d'échelle est négligeable (voir anomalies dû à la projection Lambert conique), il fait multiplier la distance mesurée par l'échelle de la carte afin d'obtenir la distance réelle.
-
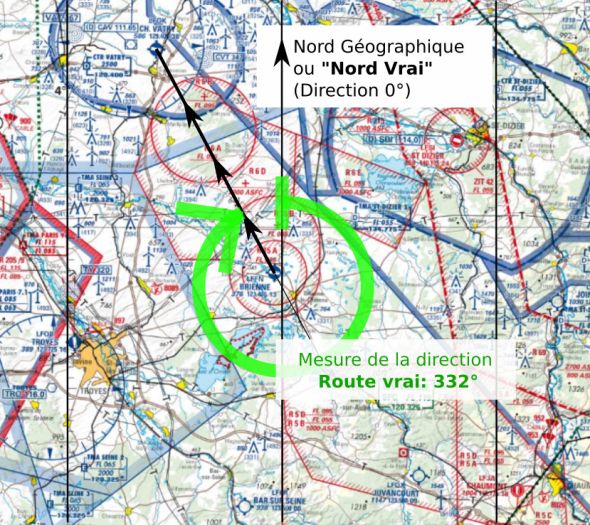 Mesure de la direction d'une route entre Brienne et Vatry.
Mesure de la direction d'une route entre Brienne et Vatry. -
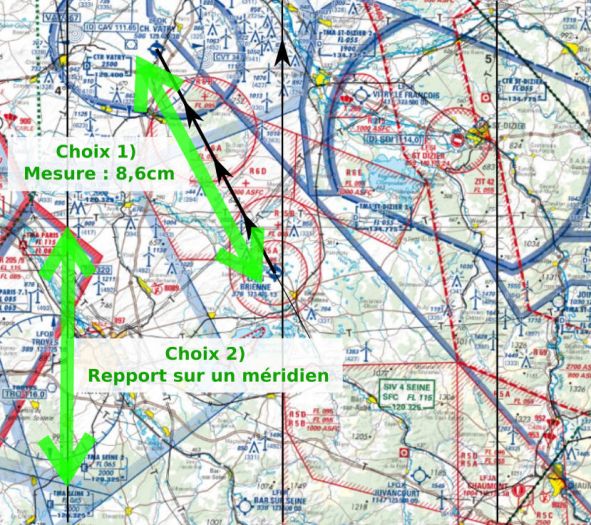 Mesure de la distance entre Brienne et Vatry par 2 méthodes. 1) 8.6cm x 500 000 = 43.5km. 2)utiliser un méridien comme règle gradué en y reportant la longueur : 00°24'00" = 24NM = 44.5km. L'écart de 1km est peu important.
Mesure de la distance entre Brienne et Vatry par 2 méthodes. 1) 8.6cm x 500 000 = 43.5km. 2)utiliser un méridien comme règle gradué en y reportant la longueur : 00°24'00" = 24NM = 44.5km. L'écart de 1km est peu important.


De la réalité à la carte : Tracer un relèvement et un éloignement
- Un relèvement est la détermination de l'angle que fait, dans le plan horizontal, la ligne d'un observateur (le pilote) vers un objet avec celle d'une direction de référence fixe (le Nord géographique dans le cas le plus courant). Cette angle est mesuré en vol puis reporté sur la carte.
- Un éloignement est une distance déterminée en vol entre l'aéronef et un point géographique connu. Cette distance est ensuite reportée sur la carte.
Avec au minimum 2 relèvements, ou 1 relèvement et 1 éloignement, il est possible de connaître sa position sur une carte.
-
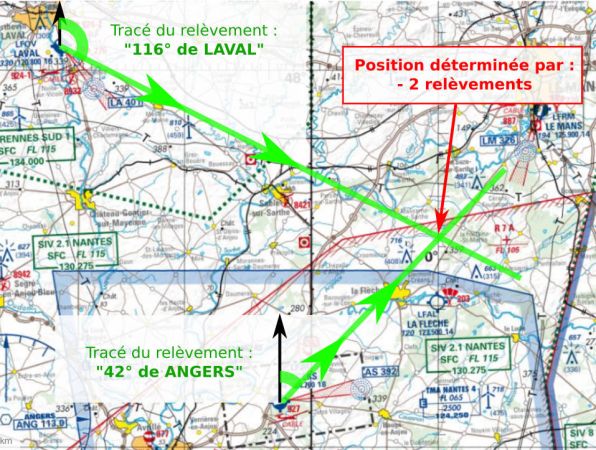 Tracé de 2 relèvements pour déterminer sa position (ces relèvements peuvent par exemple être transmit par le contrôle aérien de chacun des aérodromes par radiogoniométrie des émissions de l'aéronef).
Tracé de 2 relèvements pour déterminer sa position (ces relèvements peuvent par exemple être transmit par le contrôle aérien de chacun des aérodromes par radiogoniométrie des émissions de l'aéronef). -
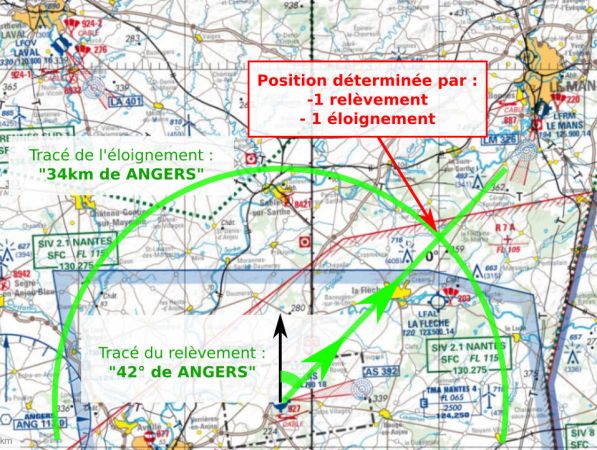 Tracé d'un relèvement et d'un éloignement (provenant par exemple d'une estimation grâce au temps de vol et à la vitesse sol).
Tracé d'un relèvement et d'un éloignement (provenant par exemple d'une estimation grâce au temps de vol et à la vitesse sol).


Modèle en boucle détecté : 9- Navigation (motoplaneurs)
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a trois méthodes de navigation :
Le cheminement
Cheminer consiste à utiliser les repères au sol caractéristiques et bien visibles depuis un aéronef. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps. On appelle aussi cheminement le fait de se diriger, à vue, de repères en repères situés à proximité l'un de l'autre.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
En vol, il est courant de confondre différents repères et ainsi avancer dans une mauvaise direction. A court terme, cela engendre une situation d’égarement. Pour garder une bonne conscience de la situation, le pilote doit évaluer le niveau de certitude de sa position :
- 1 à 2 repères = position peu sûre à conforter au plus vite,
- 3 à 4 repères = position fiable,
- 5 à 6 repères = position très fiable...
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct (une ligne droite) et que le cheminement n'est pas possible par manque de repères (ou des repères trop éloignés l'un de l'autre).
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères.
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon.
Pour naviguer à l'estime, les notions entre les différentes Vitesses sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées :
- La Vitesse Indiquée : En vol, l'indicateur de vitesse affiche la Vitesse Indiquée (VI ou IAS pour Indicated Air Speed en anglais). Cette indication n'est pas exacte.
- La Vitesse Conventionnelle : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument. Lorsque besoin, le manuel de vol explique la façon de déduire la Vc depuis la Vi (Vc ou CAS pour Calibrated Air Speed en anglais);
- La Vitesse Vrai : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou TAS pour True Air Speed en anglais);
- La Vitesse Propre : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp);
- La Vitesse équivalente : C'est la vitesse d'un aéronef, corrigée des effets de la compressibilité à l'altitude donnée (Ev ou EAS pour Equivalent Air Speed en anglais)
- La Vitesse sol : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou GS pour Ground Speed en anglais). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation).
-
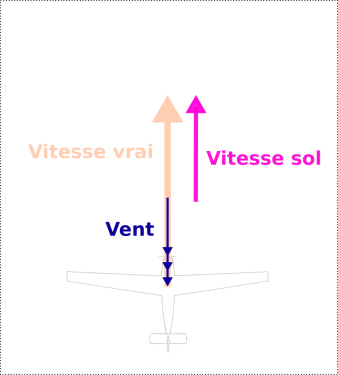 Vent de face, la vitesse sol est plus faible.
Vent de face, la vitesse sol est plus faible. -
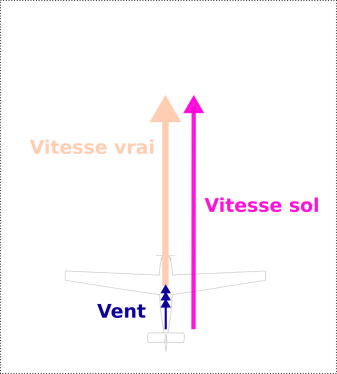 Vent arrière, la vitesse sol est plus élevée.
Vent arrière, la vitesse sol est plus élevée. -
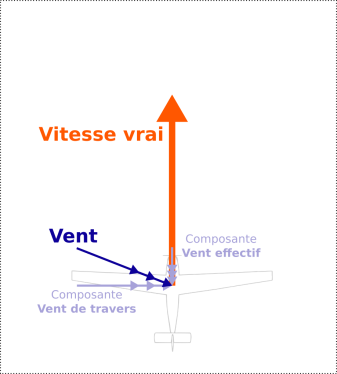 les composantes d'un vent quelconque.
les composantes d'un vent quelconque.



Pour naviguer à l'estime, il est nécessaire de connaître ces définitions :
- ETA : Estimated Time of Arrival en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé.
- la Route : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de Route vrai) ou par rapport au Nord magnétique (on parle de Route magnétique);
- le Cap : C'est la direction de la ligne de fois de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le cap compas), au Nord magnétique (le cap magnétique), ou au Nord vrai (le cap vrai).
- Le vent (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le vent effectif qui est la composante venant de face ou de l'arrière, et le vent de travers qui est la composante venant perpendiculairement à la trajectoire.
- la Dérive : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la correction de dérive ou angle de correction de dérive. En l'absence de vent de travers, le cap et la route sont identiques.
-
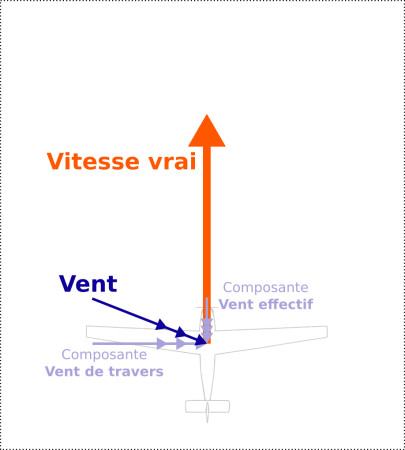 les composantes d'un vent quelconque.
les composantes d'un vent quelconque. -
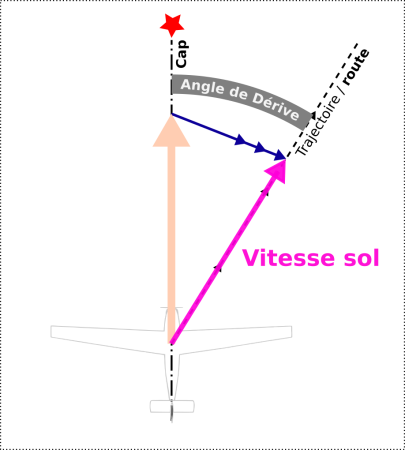 La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive.
La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive. -
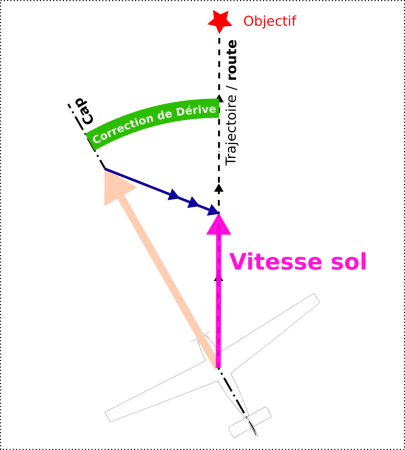 Après application d'un cap au vent pour créer un angle de correction de dérive.
Après application d'un cap au vent pour créer un angle de correction de dérive.


Le computer de navigation
Un computer de navigation est une forme de règle à calcul circulaire utilisée dans l' aviation. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation.
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
_vierge.png)
Durant le vol, le pilote navigue facilement grâce à la préparation menée au sol. Toutefois, il sera nécessaire d'évaluer et d'ajuster un certain nombre de paramètres, en croisière le pilote utilise des repères connus pour actualiser les éléments de navigation :
- Actualisation de la vitesse sol : Durant une ligne droite, il va être possible de déterminer sa vitesse sol réelle en fonction de la distance parcourue entre deux repères et le temps passé (chronomètre). Il est possible de corriger la vitesse sol estimée au départ.
- Actualisation de la vitesse et de la direction du vent : Grâce à la connaissance de la vitesse sol et de la dérive constatée en vol, le pilote peut en déduire la vitesse et la direction du vent (triangle des vitesse). Cet élément permet d'actualiser les corrections à apporter sur le prochain segment de navigation.
- Corrections de trajectoires : Si la route suivi n'est finalement pas la route escomptée, le pilote appliquera des corrections de trajectoire. Ces corrections permettent de revenir sur la route et sont plus ou moins forte suivant la nécessité de corriger l'écart rapidement (relief, espaces aériens, nécessité de se rapprocher d'un repère pour éviter l'égarement...)
- Révisions des ETA : L’ensemble des paramètres révisés permettent de conclure à une modification des ETA.
Pour la navigation à vue, et particulièrement la navigation à l'estime, le Journal de navigation ou Log de navigation est une technique de préparation des informations (au sol) et d'actualisation (en vol). Il s'agit d'un petit tableau regroupant les informations de navigation par ordre chronologique (points tournant, route magnétique, distance, carburant, ETA...etc). Bien que le format de base soit commun, chaque pilote peut y ajouter des informations qu'il souhaite retrouver facilement durant le vol. Ce document est créé lors de la préparation du vol et il est emmené en vol au même titre qu'une carte. Durant le vol, le pilote corrigera les informations en fonction de l'actualisation des paramètres.
-
 Exemple de log de navigation complété.
Exemple de log de navigation complété. -
 Tracé exemple d'une navigation LFMX - Vinon - Gap sur une carte aéronautique au 1/500 000
Tracé exemple d'une navigation LFMX - Vinon - Gap sur une carte aéronautique au 1/500 000
_compl%C3%A9t%C3%A9_en_exemple.png)

Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Utilisation du Service d'Information de Vol

Le Service d'Information de Vol, souvent appelé SIV (traduit de Flight Information Service ou FIS en anglais) est un service apporté à tout aéronef évoluant dans une Région d'information de vol (traduit de Flight Information Region ou FIR en anglais). Une FIR s'étant du sol au FL195. A l'intérieur d'une FIR, le Service d'Information de Vol peut être rendu par différentes entités, suivant l'endroit où l'aéronef évolue :
- Lorsque l'aéronef évolue dans un espace aérien contrôlé (classe d'espace E, D, C, B, A), il est rendu par les services du contrôle.
- Lorsque l'aéronef évolue en classe d'espace G, il est rendu par un centre de service de la circulation aérienne proche.
Pour l'aviation générale en France, le Service d'Information de Vol est disponible durant tout le vol. Dans le cadre du Service d'Information de Vol, l'organisme (contacté par radio) peut transmettre des renseignements (règlementation SERA, article SERA.9005):
- sur la disponibilité des services de radionavigation;
- sur les modifications de l’état des aérodromes et des installations et services connexes, y compris des renseignements sur l’état des aires de mouvement lorsque leurs caractéristiques sont modifiées par la présence de neige, de glace ou d’une épaisseur significative d’eau;
- sur les conditions météorologiques observées ou prévues aux aérodromes de départ, de destination et de dégagement;
- sur les risques de collision;
- sur les renseignements disponibles sur la circulation et les conditions météorologiques le long de la route lorsque ces conditions sont susceptibles de rendre impossible la poursuite du vol selon les règles de vol à vue ;
- sur tout autre renseignement susceptible d’avoir une incidence sur la sécurité.
- Cette liste est réduite aux informations utiles au vol en planeur.
Dès que besoin, le pilote peut bénéficier du SIV en contactant le service adéquat par radio. C'est un service gratuit, permettant d'augmenter le niveau de sécurité.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Bases de la propagation des ondes radioélectrique
Aujourd'hui, beaucoup de systèmes fonctionnent avec des ondes radioélectriques comme le téléphone sans fil ou la télévision. En aéronautique, la possibilité de transmettre des informations grâce à des ondes radioélectriques est très utile comme par exemple pour communiquer oralement, donner des informations de direction, ou encore des informations de position...etc.
Afin d'exploiter correctement ces systèmes, et surtout d'en connaître les limitations respectives, il est nécessaire d'aborder brièvement leur fonctionnement.
Caractéristiques des Antennes : Les ondes électromagnétiques sont émises par des antennes. La forme et la taille de l'antenne peut être très différent suivant :
- La fréquence de l'onde électromagnétique utilisée : Pour un même type d'antenne, plus la fréquence est élevée et plus l'antenne est petite.
- La directivité de l'antenne : Une antenne peut émettre dans toutes les directions (utile en communication radio), ou alors seulement dans une direction particulière (utile pour un radar). Toutes les antennes connaissent des "angles morts" où elles n'émettent (ou ne reçoivent) pas du tout.
- La puissance de l'onde à émettre : Une antenne de forte puissance ou prévue pour capter de très faibles signaux est généralement plus grande.
-
 Antenne pour la communication VHF (118 à 137 MHz)
Antenne pour la communication VHF (118 à 137 MHz)

AJOUTER PHOTO ANTENNE Flarm, Antenne GPS, Antenne transpondeur, Antenne VOR, antenne VDF
La Propagation des ondes : Suivant la fréquence de l'onde utilisée, la propagation des ondes radio est différente. Les concepteurs des systèmes aéronautiques choisissent la fréquence la plus adaptée au besoin du système. Les 3 types de propagation sont :
- les ondes de sol (0.03 à 0.3 MHz) : C'est lorsque l'onde se propage en suivant la courbure de la terre. Utile pour établir des communication mondiales, mais la puissance nécessaire est très importante.
- les ondes de ciel (1 à 30MHz) : C'est lorsque l'onde est capable d'être réfléchie par une couche de l'atmosphère (la ionosphère) et sur le sol, permettant par exemple d'établir des communications entre deux vallées encaissées et des communications mondiales avec plusieurs rebonds.
- les ondes directes (30MHz et plus) : C'est lorsque l'onde se propage en ligne droite, et sont arrêtées par les obstacles. C'est la portée optique. Pour établir une transmission entre un émetteur et un récepteur, il faut que ces derniers puisse se voir. Les montagnes peuvent empêcher la propagation (les bâtiments dans une moindre mesure), mais c'est surtout le fait que la terre soit ronde qui limite la portée optique. Dans le cas du franchissement de l’horizon, plus l'émetteur et le récepteur sont haut, et plus la portée optique est grande. Il est possible de calculer la portée optique avec l'altitude de l'aéronef (h) en mètre : . Il faut noter que cette formule ne prend en compte que les contraintes géométriques de la Terre. En tenant compte de l'atmosphère terrestre, la portée est légèrement plus grande.
-
 La propagation par onde de sol sur la surface de la Terre.
La propagation par onde de sol sur la surface de la Terre. -
 La propagation par onde de ciel réfléchie entre ciel et terre.
La propagation par onde de ciel réfléchie entre ciel et terre. -
 La propagation par onde directe (portée optique).
La propagation par onde directe (portée optique).




La puissance de l'onde : La puissance émise par une antenne se propage et se répartie dans plusieurs directions. Au fur et à mesure que l'onde s'éloigne de son antenne, sa puissance émise se dilue sur une zone de plus en plus grande. Il est possible que pour un récepteur très éloigné, la puissance soit trop diluée (trop faible) et qu'aucun signal ne soit détecté. La portée est donc limitée par la puissance émise et par la sensibilité du récepteur. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Radiogoniométrie au sol Le principe est de déterminer la direction d'une émission radioélectrique. Au sol, ce principe est utilisé par les services de la Circulation Aérienne pour déterminer d'où provient l'onde radioélectrique de l'aéronef qui est en train de parler. Pour eux, c'est une aide importante pour comprendre la situation rapidement. Pour le pilote planeur, l'information de QDR (Relèvement magnétique en code Q) peut être obtenue sur simple demande par radio :
- Avec le QDR provenant de deux organismes de contrôles différents et une carte, il est possible d'obtenir sa position.
- Avec le QDR provenant d'un contrôleur d'aérodrome, il est possible de calculer une route pour prendre la direction de l'aérodrome (QDM en code Q). Le QDM est l’inverse du QDR (QDM = QDR +/-180°).
En France, tous les organismes de contrôle aérien disposent normalement d'un Radiogoniomètre. Dès qu'une communication radio est établie (portée optique), il est possible d'obtenir un QDR ou un QDM. Voici un exemple de demande à faire par radio :
- "Orléans info du motoplaneur F-CCUY, je suis égaré, pouvez vous me donner un QDR par rapport à l'aérodrome d'Orléans?"
- "F-CCUY de Orléans info, vous êtes dans le relèvement magnétique 145°"
- "Orléans info du F-CCUY, 145°, je vous remercie"
La précision des systèmes de radiogoniométrie moderne est bonne.
NDB/ADF (Radiocompas)
Le radiocompas est un système basé sur la radiogoniométrie. Des balises au sol placées aux points clefs des trajectoires des aéronefs émettent en permanence sur une fréquence comprise entre 190 et 1 750 kHz (en France, principalement entre 280 et 450 kHz). A bord de l'aéronef, un système de radiogoniométrie permet de mesurer l'angle entre la balise et l'axe longitudinal de l'aéronef.
- NDB : Non Directional Beacon en anglais, Balise Non Directionnelle en français. Il s'agit du nom de la balise au sol.
- ADF : Automatic Directional Finder en anglais, Radiocompas en français. Il s'agit du nom de l'instrument implanté à bord de l'aéronef.
La fréquence utilisée permet la propagation en onde de sol. La portée n'est donc pas limité par l'horizon. Seule la puissance émettrice de la balise limite la portée.
Limitations du système ADF : le signal est affecté par les conditions atmosphériques, les terrains montagneux, la réfraction côtière et les orages, notamment sur les longues distances.
Utilisation :
- Le pilote souhaite exploitée une balise indiquée par sa carte;
- Il entre la fréquence de la balise sur son radiocompas;
- Pour vérifier que la bonne balise est sélectionnée, il écoute le message en morse qu'émet la balise toute les 15 secondes (3 lettres indiquées sur la carte);
- Le radiocompas pointe en direction de la balise.
-
 Antenne NDB "NKR" à Leimen-Ochsenbach, Allemagne
Antenne NDB "NKR" à Leimen-Ochsenbach, Allemagne -
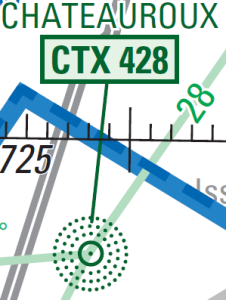 Le symbole du NDB sur une carte. la fréquence de la balise est 428KHz, CTX est son identifiant émit en morse
Le symbole du NDB sur une carte. la fréquence de la balise est 428KHz, CTX est son identifiant émit en morse -
 radiocompas
radiocompas



VOR
Un système VOR (VHF Omnidirectional Range en anglais) permet de déterminer un relèvement magnétique par rapport à une station au sol (balise émetteur VOR dont la position est connue), et donc le radial sur lequel l'aéronef est situé. Par déduction, il permet de suivre n'importe quelle route passant par la station (en rapprochement ou en éloignement de celle-ci), ou même de déterminer la position exacte de l'avion en utilisant deux balises VOR (intersection de radiaux) ou un DME (intersection d'un radial et d'un arc DME).
La station au sol utilise la gamme de fréquences VHF de 108 à 117,95 MHz (donc une portée optique). Plus intéressant que le radiocompas, le VOR est moins soumis aux perturbations extérieures, telles celle de l'ionosphère ou simplement les nuages.
L'indicateur à bord qui permet de lire les indications du VOR se nome OBI (Omnidirectional Bearing Indicator en anglais). Il est composé de plusieurs indicateurs :
- le FLAG qui permet de savoir si on reçoit ou non le signal de la station VOR
- un bouton OBS (Omnidirectional Bearing Selector) pour choisir le radial auquel on souhaite se comparer
- une aiguille de déviation qui indique le résultat de la comparaison : si on se trouve à droite, à gauche ou sur le radial choisi
- derrière l'aiguille, une échelle indique l'amplitude de l'écart. Chaque point représente un écart de 2° soit une indication de 10° max de chaque côté
- un indicateur TO / FROM qui permet de savoir si on est en situation de rapprochement ou d’éloignement de la station sol
Utilisation :
- Le pilote souhaite exploitée une balise VOR indiquée par sa carte;
- Il entre la fréquence de la balise sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise (3 lettres indiquées sur la carte);
- Si le pilote souhaite intercepter un radial donné, il choisi le radial souhaité avec le bouton OBS et l'intercepte lorsque l'aiguille de déviation n'indique plus d'écart
- Si le pilote souhaite connaître le radial sur lequel il se trouve, il tourne le bouton OBS jusqu'a ce que l'aiguille de déviation n'indique plus déviation. L'indicateut TO/FROM lui permet de lever le doute entre QDR et QDM.
-
 Vue aérienne d'un ensemble d'antenne d'une balise VOR de Sprimont "SPI" en Belgique
Vue aérienne d'un ensemble d'antenne d'une balise VOR de Sprimont "SPI" en Belgique -
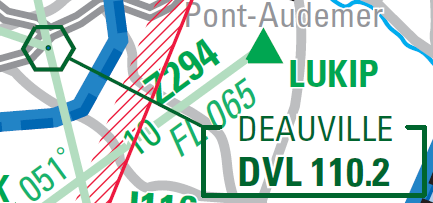 Le symbole du VOR sur une carte. la fréquence de la balise est 110.2MHz, DVL est son identifiant émit en morse
Le symbole du VOR sur une carte. la fréquence de la balise est 110.2MHz, DVL est son identifiant émit en morse -
 Omnidirectional Bearing Indicator. L'aiguille de déviation est au centre (5 graduations de chaque côté). L'indicateur TO/FROM indique FROM. Le radial sélectionné est le 252°.
Omnidirectional Bearing Indicator. L'aiguille de déviation est au centre (5 graduations de chaque côté). L'indicateur TO/FROM indique FROM. Le radial sélectionné est le 252°.



DME
Un système DME (Distance Measuring Equipment en anglais) permet de connaître la distance oblique qui sépare un aéronef d'une station au sol en mesurant le temps que met une impulsion radioélectrique pour faire un aller-retour.
- Une station sol DME est typiquement implantée avec un VOR. On parle alors de station sol VOR/DME.
- Le DME est fonctionnellement identique au composant distance du TACAN, c'est dire qu'un utilisateur de DME peut exploiter les stations sol TACAN.
- Une station sol DME basse puissance peut être implantée avec un ILS pour mesurer la distance par rapport au seuil de piste lors d'une finale sans visibilité.
La station au sol utilise la gamme de fréquences UHF de 962 à 1 213 MHz (donc une portée optique) qui sont appariées à celles des VOR et des ILS : c'est à dire que la fréquence du DME est automatiquement sélectionnée lorsque le pilote renseigne la fréquence du VOR ou le l'ILS. A noter que c'est la distance oblique qui est mesurée, donc si l'aéronef passe à la verticale de la station sol, le DME indiquera la hauteur de l'aéronef.
l'OACI préconise une précision minimum de ±(0,25 milles nautiques + 1,25 % de la distance). Une station sol peut gérer environ 100 aéronefs. Au delà, elle ignore les aéronefs les plus loin.
Utilisation :
- Le pilote souhaite exploitée une balise VOR/DME indiquée par sa carte;
- Il entre la fréquence de la balise VOR sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise un peu plus aigüe que le code du VOR (3 lettres indiquées sur la carte);
- La distance oblique s'affiche à l'écran quelques secondes plus tard.
- Si l'aéronef est très éloigné par rapport à une station sol, il sera dans les premiers à perdre l'information si la balise devient saturée.
-
 Vue d'antenne DME seule.
Vue d'antenne DME seule. -
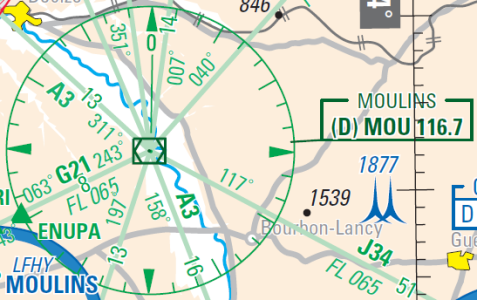 Le symbole du VOR/DME sur une carte. la fréquence du VOR 116.7MHz doit être sélectionnée pour utiliser le DME appariée, MOU est son identifiant émit en morse
Le symbole du VOR/DME sur une carte. la fréquence du VOR 116.7MHz doit être sélectionnée pour utiliser le DME appariée, MOU est son identifiant émit en morse -
 Afficheur DME. En exploitant la variation de la distance en fonction du temps, il peut indiquer une vitesse sol radiale, et le temps restant pour atteindre la balise.
Afficheur DME. En exploitant la variation de la distance en fonction du temps, il peut indiquer une vitesse sol radiale, et le temps restant pour atteindre la balise.



Les Radars
Radar primaire au sol
Le radar (acronyme issu de l'anglais RAdio Detection And Ranging) est un système qui utilise les ondes électromagnétiques pour détecter la présence et déterminer la position des aéronefs. Les ondes envoyées par l'émetteur sont réfléchies par la cible, et les signaux de retour (appelés écho-radar) sont captés et analysés par le récepteur. La distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne. L'altitude ne peut pas être mesurée, bien que les systèmes modernes et plus élaborés parviennent à donner une indication d'altitude.
Ce principe de Radar ne nécessite aucun instrument à bord de l'aéronef et est appelé Radar primaire. La fréquence utilisée est choisie pour être réfléchies par les aéronefs sans être (trop) perturbée par les phénomènes météo. La portée est la portée optique. Les puissances émises sont très importantes car l'onde doit faire le voyage aller, être partiellement réfléchie par l'aéronef, et faire le voyage retour.
Généralement, le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), et proche de lui (impossibilité de recevoir le signal tant que l'antenne émet). Comme le système est à portée optique, un aéronef en basse altitude masqué par un relief n'est pas visible. Ce type de radar n'est pas forcement disponible par tous les centres de contrôles.
Utilisation :
- le radar balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les échos-radar s'affichent sur l'écran du contrôleur aérien, mais le système ne donne aucune information sur ces plots radar.
- classiquement, le radar primaire ne permet pas de connaître l'altitude de l'aéronef
-
 Principe du radar primaire.
Principe du radar primaire. -
 Antenne du radar primaire, dans un couple radar primaire + radar secondaire.
Antenne du radar primaire, dans un couple radar primaire + radar secondaire. -
 Type d'écran de radar primaire non filtré avec tous les échos-radar parasites.
Type d'écran de radar primaire non filtré avec tous les échos-radar parasites.



Radar de surveillance secondaire
Le radar secondaire (ou SSR pour Secondary Surveillance RADAR en anglais), est un dispositif radar de contrôle aérien qui « interroge » les aéronefs équipés d'un transpondeurs qui sont à sa portée. Les transpondeurs interrogés répondent au radar en envoyant le code à 4 chiffre entré par le pilote (ce code est communiqué par le contrôle aérien par radio). Les réponses des avions sont captées et analysées par le récepteur. Comme pour le radar primaire, la distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne, et l'altitude ne peut pas être mesurée. L’intérêt du radar secondaire est que chaque plot radar est identifié par le code à 4 chiffres permettant au contrôle aérien d'identifier sans ambiguïté qui est qui.
Pour être visible du contrôle aérien, il est impératif d'avoir un transpondeur en fonctionnement à bord de l'aéronef. La fréquence utilisée est de 1030MHz (interrogations radar sol) et 1090MHz (réponse du transpondeur). La portée est la portée optique (donc un aéronef en basse altitude masqué par un relief n'est pas visible). Les puissances émises sont moins importantes qu'un radar primaire car l'onde ne doit faire que le voyage aller. Le voyage retour est fait l'onde émise par le transpondeur.
Le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), ou proche de lui (technologie de Suppression des Lobes Secondaires) mais la zone est généralement couverte par une antenne voisine. Il a été constaté qu'un planeur en spirale peut temporairement disparaitre des écrans radar.
Les technologies de radar secondaire ont évolué au fil du temps :
- Le mode A : Le mode le plus basique. Le transpondeur répond avec le code SSR composé de 4 chiffres de 0 à 7.
- Le mode C : Le transpondeur répond avec le code SSR + l'altitude pression à laquelle se trouve l'aéronef. Sur l'écran du contrôleur, le plot radar apparait avec le code et l'altitude, permettant une gestion fine de la circulation aérienne.
- Le mode S : Le transpondeur répond avec le code SSR + l'altitude + l'immatriculation + d'autres informations...Sur l'écran du contrôleur, le plot radar apparait avec l'immatriculation et l'altitude. Ce mode permet au contrôleur une meilleure réactivité et de donner le même code SSR à plusieurs aéronefs.
En France en 2020, le radar secondaire mode S est disponible dans une majorité de centres de contrôles.
Lors d'un vol sans service ATS, le pilote peut mettre un code de sa propre initiative afin de transmettre un message particulier :
| Liste des codes SSR à connaître | |
|---|---|
| Code | Signification |
| 7000 | Code à utiliser France en l'absence de d'ATS, pour transmettre sa position et améliorer la sécurité. Obligatoire, sauf pour les aéronefs à autonomie électrique limitée (planeurs pur, ballons...) |
| 7500 | Code pour signifier une intervention illicite (détournement...) |
| 7600 | Code pour signifier une panne des moyens de communication radio |
| 7700 | Code pour signifier une situation d'urgence ou d'interception |
Aussi, le système TCAS (implanté généralement à bord des aéronefs de tailles moyennes) interrogent les transpondeurs de tous les autres aéronefs dans un rayon de quelques dizaines de kilomètres. La position des autres aéronefs est connu, permettant de prévenir les collisions.
- le pilote affiche le code 7000, ou un code donné par l'ATS par radio.
- le radar secondaire balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les réponses des transpondeurs s'affichent sur l'écran du contrôleur aérien. En fonction du Mode (A, C ou S), plus ou moins d'informations apparaissent à côté du plot radar.
- Le contrôleur peut demander à un pilote de mettre Transpondeur IDENT. Le pilote doit appuyer sur le bouton IDENT.
- Le plot radar apparait alors en surbrillance pendant quelques minutes, pour aider l'identification par le contrôleur.
-
 Antenne du radar secondaire, dans un couple radar primaire + radar secondaire.
Antenne du radar secondaire, dans un couple radar primaire + radar secondaire. -
 transpondeur à bord. Code actif 7000 (en haut), mode A + C + S. Noter le bouton Ident en haut à droite.
transpondeur à bord. Code actif 7000 (en haut), mode A + C + S. Noter le bouton Ident en haut à droite. -
 Type d'écran de radar secondaire. Aéronef 1 : mode C, Alt. 700ft, 70kt. Aéronef 2 : mode S, alt. 2600ft, 70kt. Aéronef 3 : mode S, alt. 200ft, 100kt.
Type d'écran de radar secondaire. Aéronef 1 : mode C, Alt. 700ft, 70kt. Aéronef 2 : mode S, alt. 2600ft, 70kt. Aéronef 3 : mode S, alt. 200ft, 100kt.



Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation par satellite est une technique de navigation basé sur système de positionnement par satellites.
Un système de positionnement par satellites (ou GNSS pour Global Navigation Satellite System en anglais) est un ensemble de composants reposant sur une constellation de satellites artificiels permettant de déterminer sa position 3D, sa vitesse 3D et l'heure grâce à un récepteur portable de petite taille. Cette catégorie de système de géopositionnement a pour avantage une précision de l'ordre de 5 à 15 mètres, une couverture quasi-mondiale. A l’inverse, le type d'onde utilisée rend le système sensible aux obstacles présents entre le terminal récepteur et les satellites (immeubles, montagnes...).
En plus de cet ensemble, certains systèmes d'augmentation et de fiabilisation permettent de fiabiliser le système et d'améliorer les performances à une précision de quelques mètres (DGPS, EGNOS, Assisted GPS...).
Mise en œuvre
Le système GPS (le système développé par les États-Unis) repose sur une constellation d'une trentaine de satellites qui permet à un utilisateur, situé sur n'importe quel point du globe, d'avoir toujours au minimum quatre satellites à portée (dans l'hypothèse d'un environnement dégagé d'obstacles dit « clear sky »). Le terminal de l'utilisateur calcule sa position grâce au signal émis par chacun des satellites. À ce stade, la communication est mono-directionnelle, c'est-à-dire que le terminal de l'utilisateur ne fait que recevoir les signaux.
| Informations disponibles sur le récepteur en fonction du nombre de satellites en vue | |
|---|---|
| 2 satellites | Date et heure |
| 3 satellites | Date et heure + position horizontale (latitude et longitude) |
| 4 satellites et + | Date et heure + position horizontale + position verticale (altitude) |
Avantages
- Le système GNSS permet de se positionner très rapidement directement sur une carte.
- De nombreuses fonctions des récepteurs permettent aussi de programmer la route suivie: dans la navigation aérienne sous forme de points tournants pour faciliter le travail du pilote.
- En planeur, le récepteur peut calculer des plans de finesses pour rejoindre les aérodromes proches.
Inconvénients
- Il faut être très attentif au « système de coordonnées » utilisé, et bien régler le récepteur afin qu'il fournisse les coordonnées dans le système de référence utilisé actuellement en aéronautique : Le système WGS 84.
- L'utilisation de cette technique nécessite la présence « d'électricité » à bord (panne du système si manque d'énergie à bord, particulièrement pour les planeurs)
Le système GPS des États-Unis était le premier en service. Depuis, ces systèmes sont disponibles :
-
 Antenne d'un récepteur GNSS, environ 3cm de côté. Elle doit avoir une vue dégagée vers le ciel.
Antenne d'un récepteur GNSS, environ 3cm de côté. Elle doit avoir une vue dégagée vers le ciel. -
 Coordonnées de Latitude et Longitude données par un récepteur GNSS d'ancienne génération (sans carte)
Coordonnées de Latitude et Longitude données par un récepteur GNSS d'ancienne génération (sans carte) -
 Récepteurs GNSS à bord d'un planeur avec affichage sur carte interactive (au centre).
Récepteurs GNSS à bord d'un planeur avec affichage sur carte interactive (au centre).



Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Exercices
Ces documents sont disponibles afin de stimuler l'apprentissage par d'autres moyens que la simple lecture. Chacun est libre de les utiliser comme il l'entend: en autonomie, dans le cadre d'un devoir donné par un ATO/DTO, en TP lors de cours en DTO...etc. Wiki-SPL.net propose le contenu mais n'a pas vocation à répondre aux demandes d'aides à l'apprentissage. Ce rôle est assuré par les formateurs des ATO/DTO dont il faudra se rapprocher !
- Cahier d’exercices N°1 Document à imprimer. Prévoir un matériel basique (règle, crayon, rapporteur...).
La navigation aérienne est l'ensemble des techniques permettant à un pilote d'aéronef de maîtriser ses déplacements. La navigation permet à l'aéronef de suivre une trajectoire appelée route.
La navigation aérienne est largement héritière de la navigation maritime et la terminologie utilisée est identique.
Aux débuts de l'aviation, les navigations se faisaient à vue. En cas de conditions de visibilité dégradées, des phares aéronautiques jalonnaient certains tronçons de routes régulièrement empruntées, comme celle de l'Aéropostale qui amenaient le courrier de la France vers l'Afrique puis l’Amérique du Sud.
Au cours de la seconde moitié du XXe siècle, s’est développée la radionavigation. Au début du XXIe siècle, la navigation aérienne utilise largement le GPS.
Définitions
Le système solaire
Les variations saisonnières de la position du soleil sont créées par l'inclinaison de l'axe de rotation de la Terre par rapport au plan de son orbite autour du Soleil (écliptique). Pour un observateur terrestre, tout au long de l'année, le Soleil, bien que fixe, semble avoir une trajectoire différente dans le ciel. L'été est la saison où la journée dure le plus longtemps et le soleil monte le plus haut dans le ciel.
-
 Alternance des saisons sur une année.
Alternance des saisons sur une année. -
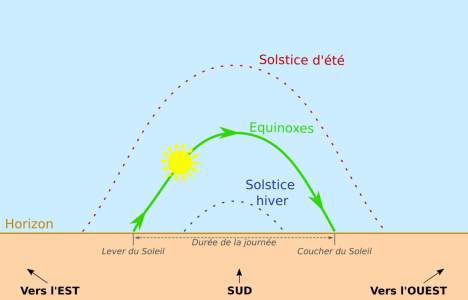 Mouvement apparent du soleil durant la journée pour un observateur situé dans l'hémisphère nord, en France
Mouvement apparent du soleil durant la journée pour un observateur situé dans l'hémisphère nord, en France


Se repérer sur la Terre
Afin de se repérer sur la sphère terrestre, la sphère est quadrillée par :
- Des Parallèles. Lorsqu'on se déplace vers le Nord ou le Sud (en restant sur le même méridien), on change de parallèle. Les Parallèles sont numérotés en degrés (0° étant l'équateur) plus une indication Nord ou Sud. le pôle Nord est numéroté 90°N. Paris se situe au niveau du parallèle 48,8°N. Il s'agit de la coordonnée de Latitude
- Des Méridiens. Lorsqu'on se déplace vers l'Ouest ou l'Est (en restant sur le même parallèle), on change de méridien. Les méridiens sont numérotés en degrés (0° étant le méridien passant par l'observatoire royal de Greenwich) plus une indication Ouest ou Est. Paris se situe au niveau du méridien 2,3°E. Il s'agit de la coordonnée de Longitude
-
 Principaux parallèles, permettant de mesurer la Latitude et Principaux méridiens, permettant de mesurer la Longitude
Principaux parallèles, permettant de mesurer la Latitude et Principaux méridiens, permettant de mesurer la Longitude

Les coordonnées peuvent être exprimées de deux manières :
- Expression en degrés et décimale : La tour Eiffel à Paris se situe exactement aux coordonnées 48.8582N, 2.2945E
- Expression en degrés, minutes et secondes : parfois noté « DMS ». Chaque degré est divisé en 60minutes (1°=60'), puis chaque minute et divisé en 60secondes (1'=60"). La tour Eiffel se situe exactement aux coordonnées 48°51'29"N, 2°17'40"E
Les parallèles et les méridiens sont des arcs de cercles. Il est possible de les classer en 2 catégories :
- Ceux qui sont dit Grand cercles : l'arc de cercle à pour centre le centre de la terre, sont rayon est toujours égal à celui de la terre. Tous les méridiens sont des grand cercles. L'équateur est aussi un grand cercle.
- Ceux qui sont dit Petit cercles : tous les autres cercles n'ayant pas pour centre le centre de la terre. Mis a part l'équateur, tous les parallèles sont des petits cercles.
L'intérêt de cette classification est l'exploitation des Grands Cercles : leur périmètre est toujours égal au périmètre de la terre, c'est à dire environ 40 000km. Par exemple, tout déplacement de 0°01'00" en coordonnés le long d'un grand cercle fera toujours la même distance :
la longueur d'une minute d'arc (0°01'00") au niveau d'un grand cercle est la définition d'un Mille marin (nautique miles en anglais, noté NM). Cette astucieuse définition permet de calculer rapidement la distance qui sépare deux coordonnées. En ignorant les secondes d'arc, la distance entre la tour Eiffel (48°51'N, 2°17'E) et la tour de Pize (43°43'N, 10°23'E) est 05°08' sur l'axe Nord/Sud (soit 308NM).
Le temps
Le temps est une notion indispensable en navigation. Les divisions qui permettent de mesurer le temps sont faciles à appréhender et universelles : l'année, le jour, l'heure, la minute...etc. Le point de référence est beaucoup plus délicat car il en existe un certain nombre :
- LMT, Local Mean Time en anglais. C'est l'heure qui a pour référence le soleil. Lorsque le soleil est au zénith, la montre est réglée à 12h00. Cette référence dépend donc de la position géographique. Chaque endroit possède son heure LMT. Ce système est peu pratique et n'est quasiment plus utilisé aujourd'hui.
- Heures légales. Il s'agit d'une heure de référence pour un large territoire afin de résoudre les problèmes posés par l'heure LMT. Ce sont notamment les fuseaux horaires : la terre est décomposé en 24 fuseaux de 60minutes chacun qui possèdent tous leur propre heure légale de référence.
- UTC, Universal Time Coordinated en anglais. C'est une heure de référence mondiale, qui a pour référence le méridien d'origine 0°(Greenwich). A 12h UTC, le soleil est au zénith à Greenwich, mais il fait nuit dans l'Océan Pacifique. Les dénominations heure GMT] ou heure TU peuvent être considérées identique à l'heure UTC. Cette explication est en fait approximative mais suffisante pour le pilote planeur.
En aéronautique, les heures sont souvent définies en heure UTC car il est plus facile d’œuvrer avec une seule référence quelque soit le lieu ou le moment. Pour que le pilote puisse utiliser sa montre réglée en heure locale, il faudra ajouté l'écart entre l'heure UTC et son heure légale. En France, le décalage par rapport à l'heure UTC est : UTC+1 en hiver et UTC+2 en été.
La ligne de changement de date est une ligne imaginaire, à la surface de la Terre, approximativement située au 180e méridien (est et ouest) dans l'océan Pacifique ; son rôle est d'indiquer l'endroit où il est nécessaire de changer de date quand on la traverse. Les pilotes planeur européen sont peu concerné par cette notion.
Afin de définir les heures auxquelles la luminosité est suffisante pour entreprendre un vol VFR de jour, il est nécessaire de définir :
- le lever du soleil, SunRise en anglais (SR) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le matin.
- Le coucher du soleil, SunSet en anglais (SS) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le soir.
- le crépuscule civil : C'est la période où le centre du Soleil est situé à moins de 6° sous la ligne d'horizon.
La journée aéronautique durant laquelle le vol VFR de jour est possible commence au début du crépuscule avant le lever du soleil et se termine à la fin du crépuscule après le coucher du soleil. Aux latitudes moyennes (30 à 60°) cette définition est souvent simplifié, la journée aéronautique commence à SR-30min et se termine à SS+30min
Les directions
Afin de donner une direction, les points cardinaux sont utilisés. Pour un degré de précision plus important dans l'expression d'une direction, un angle est exprimé en prenant le Nord comme référence.
-
 Rose des vents, indiquant les points cardinaux.
Rose des vents, indiquant les points cardinaux. -
 Rapporteur permettant d'exprimer une direction par un angle.
Rapporteur permettant d'exprimer une direction par un angle.


{kind=link}
{kind=link}
Les Distances
Les distances horizontales sont exprimées en Mille marin ou en kilomètres.
- Pour convertir rapidement des Nautiques Miles en kilomètres par calcul mental, une bonne approximation (erreur de 3%) est : prendre le double (x2), et retirer 1/10e.
Les distances verticales sont exprimées en Pied ou en Mètre.
- Pour convertir rapidement des Pieds en Mètres par calcul mental, une bonne approximation (erreur de 1.5%) est : multiplier par dix (x10), diviser par trois (/3).
- Pour convertir rapidement des Mètres en Pieds par calcul mental, une bonne approximation (erreur de 1.5%) est : diviser par dix (/10), multiplier par trois (x3).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation aérienne est l'ensemble des techniques permettant à un pilote d'aéronef de maîtriser ses déplacements. La navigation permet à l'aéronef de suivre une trajectoire appelée route.
La navigation aérienne est largement héritière de la navigation maritime et la terminologie utilisée est identique.
Aux débuts de l'aviation, les navigations se faisaient à vue. En cas de conditions de visibilité dégradées, des phares aéronautiques jalonnaient certains tronçons de routes régulièrement empruntées, comme celle de l'Aéropostale qui amenaient le courrier de la France vers l'Afrique puis l’Amérique du Sud.
Au cours de la seconde moitié du XXe siècle, s’est développée la radionavigation. Au début du XXIe siècle, la navigation aérienne utilise largement le GPS.
Définitions
Le système solaire
Les variations saisonnières de la position du soleil sont créées par l'inclinaison de l'axe de rotation de la Terre par rapport au plan de son orbite autour du Soleil (écliptique). Pour un observateur terrestre, tout au long de l'année, le Soleil, bien que fixe, semble avoir une trajectoire différente dans le ciel. L'été est la saison où la journée dure le plus longtemps et le soleil monte le plus haut dans le ciel.
-
Alternance des saisons sur une année.
-
Mouvement apparent du soleil durant la journée pour un observateur situé dans l'hémisphère nord, en France
Se repérer sur la Terre
Afin de se repérer sur la sphère terrestre, la sphère est quadrillée par :
- Des Parallèles. Lorsqu'on se déplace vers le Nord ou le Sud (en restant sur le même méridien), on change de parallèle. Les Parallèles sont numérotés en degrés (0° étant l'équateur) plus une indication Nord ou Sud. le pôle Nord est numéroté 90°N. Paris se situe au niveau du parallèle 48,8°N. Il s'agit de la coordonnée de Latitude
- Des Méridiens. Lorsqu'on se déplace vers l'Ouest ou l'Est (en restant sur le même parallèle), on change de méridien. Les méridiens sont numérotés en degrés (0° étant le méridien passant par l'observatoire royal de Greenwich) plus une indication Ouest ou Est. Paris se situe au niveau du méridien 2,3°E. Il s'agit de la coordonnée de Longitude
-
Principaux parallèles, permettant de mesurer la Latitude et Principaux méridiens, permettant de mesurer la Longitude
Les coordonnées peuvent être exprimées de deux manières :
- Expression en degrés et décimale : La tour Eiffel à Paris se situe exactement aux coordonnées 48.8582N, 2.2945E
- Expression en degrés, minutes et secondes : parfois noté « DMS ». Chaque degré est divisé en 60minutes (1°=60'), puis chaque minute et divisé en 60secondes (1'=60"). La tour Eiffel se situe exactement aux coordonnées 48°51'29"N, 2°17'40"E
Les parallèles et les méridiens sont des arcs de cercles. Il est possible de les classer en 2 catégories :
- Ceux qui sont dit Grand cercles : l'arc de cercle à pour centre le centre de la terre, sont rayon est toujours égal à celui de la terre. Tous les méridiens sont des grand cercles. L'équateur est aussi un grand cercle.
- Ceux qui sont dit Petit cercles : tous les autres cercles n'ayant pas pour centre le centre de la terre. Mis a part l'équateur, tous les parallèles sont des petits cercles.
L'intérêt de cette classification est l'exploitation des Grands Cercles : leur périmètre est toujours égal au périmètre de la terre, c'est à dire environ 40 000km. Par exemple, tout déplacement de 0°01'00" en coordonnés le long d'un grand cercle fera toujours la même distance :
la longueur d'une minute d'arc (0°01'00") au niveau d'un grand cercle est la définition d'un Mille marin (nautique miles en anglais, noté NM). Cette astucieuse définition permet de calculer rapidement la distance qui sépare deux coordonnées. En ignorant les secondes d'arc, la distance entre la tour Eiffel (48°51'N, 2°17'E) et la tour de Pize (43°43'N, 10°23'E) est 05°08' sur l'axe Nord/Sud (soit 308NM).
Le temps
Le temps est une notion indispensable en navigation. Les divisions qui permettent de mesurer le temps sont faciles à appréhender et universelles : l'année, le jour, l'heure, la minute...etc. Le point de référence est beaucoup plus délicat car il en existe un certain nombre :
- LMT, Local Mean Time en anglais. C'est l'heure qui a pour référence le soleil. Lorsque le soleil est au zénith, la montre est réglée à 12h00. Cette référence dépend donc de la position géographique. Chaque endroit possède son heure LMT. Ce système est peu pratique et n'est quasiment plus utilisé aujourd'hui.
- Heures légales. Il s'agit d'une heure de référence pour un large territoire afin de résoudre les problèmes posés par l'heure LMT. Ce sont notamment les fuseaux horaires : la terre est décomposé en 24 fuseaux de 60minutes chacun qui possèdent tous leur propre heure légale de référence.
- UTC, Universal Time Coordinated en anglais. C'est une heure de référence mondiale, qui a pour référence le méridien d'origine 0°(Greenwich). A 12h UTC, le soleil est au zénith à Greenwich, mais il fait nuit dans l'Océan Pacifique. Les dénominations heure GMT] ou heure TU peuvent être considérées identique à l'heure UTC. Cette explication est en fait approximative mais suffisante pour le pilote planeur.
En aéronautique, les heures sont souvent définies en heure UTC car il est plus facile d’œuvrer avec une seule référence quelque soit le lieu ou le moment. Pour que le pilote puisse utiliser sa montre réglée en heure locale, il faudra ajouté l'écart entre l'heure UTC et son heure légale. En France, le décalage par rapport à l'heure UTC est : UTC+1 en hiver et UTC+2 en été.
La ligne de changement de date est une ligne imaginaire, à la surface de la Terre, approximativement située au 180e méridien (est et ouest) dans l'océan Pacifique ; son rôle est d'indiquer l'endroit où il est nécessaire de changer de date quand on la traverse. Les pilotes planeur européen sont peu concerné par cette notion.
Afin de définir les heures auxquelles la luminosité est suffisante pour entreprendre un vol VFR de jour, il est nécessaire de définir :
- le lever du soleil, SunRise en anglais (SR) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le matin.
- Le coucher du soleil, SunSet en anglais (SS) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le soir.
- le crépuscule civil : C'est la période où le centre du Soleil est situé à moins de 6° sous la ligne d'horizon.
La journée aéronautique durant laquelle le vol VFR de jour est possible commence au début du crépuscule avant le lever du soleil et se termine à la fin du crépuscule après le coucher du soleil. Aux latitudes moyennes (30 à 60°) cette définition est souvent simplifié, la journée aéronautique commence à SR-30min et se termine à SS+30min
Les directions
Afin de donner une direction, les points cardinaux sont utilisés. Pour un degré de précision plus important dans l'expression d'une direction, un angle est exprimé en prenant le Nord comme référence.
-
Rose des vents, indiquant les points cardinaux.
-
Rapporteur permettant d'exprimer une direction par un angle.
Les Distances
Les distances horizontales sont exprimées en Mille marin ou en kilomètres.
- Pour convertir rapidement des Nautiques Miles en kilomètres par calcul mental, une bonne approximation (erreur de 3%) est : prendre le double (x2), et retirer 1/10e.
Les distances verticales sont exprimées en Pied ou en Mètre.
- Pour convertir rapidement des Pieds en Mètres par calcul mental, une bonne approximation (erreur de 1.5%) est : multiplier par dix (x10), diviser par trois (/3).
- Pour convertir rapidement des Mètres en Pieds par calcul mental, une bonne approximation (erreur de 1.5%) est : diviser par dix (/10), multiplier par trois (x3).
Modèle en boucle détecté : 9-2 Magnétisme et compas (motoplaneurs) Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Cartes
Une carte présente des informations en fonction de la position considérée. En aéronautique, ces informations concernent les repères visibles, les angles, les distances, les informations sur l'espace aérien...etc. Il est nécessaire d'appréhender les codes de conception et de lecture des cartes pour une utilisation correcte.
Le type de projection cartographique
La projection cartographique est un ensemble de techniques permettant de représenter une surface non plane (surface de la Terre, d'un autre corps céleste, du ciel, ...) dans son ensemble ou en partie sur la surface plane d'une carte. L'impossibilité de projeter le globe terrestre sur une surface plane sans distorsion explique que diverses projections aient été inventées, chacune ayant ses avantages :
- La projection de Mercator : C'est une projection cylindrique. Les méridiens et les parallèles sont des droites perpandiculaires qui quadrillent le plan. Cette projection conforme conserve les angles (ce qui permet de reporter directement sur la carte les angles mesurés au compas, et vice-versa) mais ne conserve ni les distances, ni les surfaces (l'échelle de la carte variant avec la latitude). Sauf le long de l'équateur. Une ligne droite sur une carte de Mercator ne représente pas la distance la plus courte en réalité. C'est en revanche une ligne d'azimut constant (c'est-à-dire une loxodromie), particulièrement utile pour naviguer à cap constant, même si le trajet ainsi défini n'est généralement pas sur un grand cercle et n'est donc pas le chemin le plus court.
-
Projection cylindrique projection Mercator.
-
Exemple de projection cylindrique avec déformation des distances importante au niveau des pôles.
- La projection conique conforme de Lambert : C'est une projection conique. Les méridiens sont des droites convergentes en un point, les parallèles sont des cercles concentriques autour de ce même point. Elle conserve également les angles. Elle conserve les distances sur le parallèle de référence. Il est donc particulièrement intéressant d'utiliser une projection de Lambert ayant son parallèle de référence sur la zone à exploiter. A proximité du parallèle de référence, une ligne droite sur une projection de Lambert représente la distance la plus courte en réalité (c'est-à-dire une orthodromie).
-
Projection conique type projection de Lambert.
-
Exemple de projection conique.
Les cartes utilisées par le pilote planeur
- La carte permet de représenter les éléments visibles au sol. En France, l'IGN fourni diverses cartes. Ces cartes sont par exemple disponibles en version numérique sur la plateforme Géoportail. L'expérience montre que pour un vol en planeur, une carte avec représentation schématique des éléments facilement identifiables en vol est la plus adaptée.
- La carte permet également de présenter sous forme graphique une partie des informations aéronautiques présentes dans les AIP (Aeronautical Information Publication en anglais) : aérodromes, espaces aériens, fréquences radio, systèmes de radionavigation...etc
Divers organismes proposent des cartes spécifiques à l'usage aéronautique pour différents besoins. En France, c'est principalement le SIA (Service de l'Information Aéronautique) qui éditer les cartes. En partant de la plus grande échelle, les cartes régulièrement utilisées pour le vol en planeur sont :
- La carte du SIA au 1/1 000 000ème : utilisée principalement pour de la radionavigation en route. Elle couvre l'espace du sol au FL195. Disponible en version numérique sur le site web du SIA
- La carte du SIA au 1/500 000ème : utilisée principalement pour de la navigation en route en vol à vue. Elle couvre l'espace du sol au FL115 (ou 3000ft ASFC, le plus élevé des deux). Disponible en version numérique sur Géoportail.
- Les cartes VAC (Visual Approach Chart en anglais) : Il s'agit d'une présentation de l'aérodrome dans son environnement. On y trouve une carte détaillée de l'aérodrome, le sens du tour de piste, ainsi que d'autres indications utiles pour y atterrir en vol à vue. Disponible en version nuémrique sur le site web du SIA
- D'autres types de cartes qui émanent d’initiatives privées ou associative pour répondre à un usage particulier.
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Carte VAC de Chalons Vatry. Source SIA
Les cartes aéronautiques sont réalisées selon un cahier des charges précis définie par l'annexe 4 de l'OACI. Cette annexe est disponible en lecture sur la librairie électronique de l'OACI. Les cartes sont mises à jour régulièrement, tous les 6 ou 12 mois.
La légende de la carte du SIA au 1/500 000ème (version 2021 disponible ici) est disponible sur Géoportail (icône "information de la couche > afficher la légende). Les symboles principaux doivent être connus du pilote de planeur. liste non-exhaustive :
- Aérodrome avec bande en herbe ou piste en dur
- Les chiffres simples sans décimales indiquent des altitudes
- Les chiffres entre parenthèses indiquent des hauteurs
- Les chiffres à trois décimales indiquent des fréquences VHF pour la radiocommunication
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Symboles détaillant les aérodromes
-
Symboles détaillant les villes et rappelant les règles de survol
Exploitation des cartes
De la carte à la réalité : Mesure de la direction et de la distance
- La direction se mesure grâce à un rapporteur. L'objectif est de mesurer l'angle que forme la route avec le méridien le plus proche. Une route à l'Est vaut 90°, au Sud 180°, à l'Ouest 270°. Une prudence particulière doit être prise pour ne pas confondre le sens de la route, ce qui occasionnerait une erreur de 180°.
- La distance se mesure grâce à une règle graduée entre deux points. En considérant que l'erreur d'échelle est négligeable (voir anomalies dû à la projection Lambert conique), il fait multiplier la distance mesurée par l'échelle de la carte afin d'obtenir la distance réelle.
-
Mesure de la direction d'une route entre Brienne et Vatry.
-
Mesure de la distance entre Brienne et Vatry par 2 méthodes. 1) 8.6cm x 500 000 = 43.5km. 2)utiliser un méridien comme règle gradué en y reportant la longueur : 00°24'00" = 24NM = 44.5km. L'écart de 1km est peu important.
De la réalité à la carte : Tracer un relèvement et un éloignement
- Un relèvement est la détermination de l'angle que fait, dans le plan horizontal, la ligne d'un observateur (le pilote) vers un objet avec celle d'une direction de référence fixe (le Nord géographique dans le cas le plus courant). Cette angle est mesuré en vol puis reporté sur la carte.
- Un éloignement est une distance déterminée en vol entre l'aéronef et un point géographique connu. Cette distance est ensuite reportée sur la carte.
Avec au minimum 2 relèvements, ou 1 relèvement et 1 éloignement, il est possible de connaître sa position sur une carte.
-
Tracé de 2 relèvements pour déterminer sa position (ces relèvements peuvent par exemple être transmit par le contrôle aérien de chacun des aérodromes par radiogoniométrie des émissions de l'aéronef).
-
Tracé d'un relèvement et d'un éloignement (provenant par exemple d'une estimation grâce au temps de vol et à la vitesse sol).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a trois méthodes de navigation :
Le cheminement
Cheminer consiste à utiliser les repères au sol caractéristiques et bien visibles depuis un aéronef. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps. On appelle aussi cheminement le fait de se diriger, à vue, de repères en repères situés à proximité l'un de l'autre.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
En vol, il est courant de confondre différents repères et ainsi avancer dans une mauvaise direction. A court terme, cela engendre une situation d’égarement. Pour garder une bonne conscience de la situation, le pilote doit évaluer le niveau de certitude de sa position :
- 1 à 2 repères = position peu sûre à conforter au plus vite,
- 3 à 4 repères = position fiable,
- 5 à 6 repères = position très fiable...
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct (une ligne droite) et que le cheminement n'est pas possible par manque de repères (ou des repères trop éloignés l'un de l'autre).
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères.
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon.
Pour naviguer à l'estime, les notions entre les différentes Vitesses sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées :
- La Vitesse Indiquée : En vol, l'indicateur de vitesse affiche la Vitesse Indiquée (VI ou IAS pour Indicated Air Speed en anglais). Cette indication n'est pas exacte.
- La Vitesse Conventionnelle : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument. Lorsque besoin, le manuel de vol explique la façon de déduire la Vc depuis la Vi (Vc ou CAS pour Calibrated Air Speed en anglais);
- La Vitesse Vrai : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou TAS pour True Air Speed en anglais);
- La Vitesse Propre : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp);
- La Vitesse équivalente : C'est la vitesse d'un aéronef, corrigée des effets de la compressibilité à l'altitude donnée (Ev ou EAS pour Equivalent Air Speed en anglais)
- La Vitesse sol : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou GS pour Ground Speed en anglais). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation).
-
Vent de face, la vitesse sol est plus faible.
-
Vent arrière, la vitesse sol est plus élevée.
-
les composantes d'un vent quelconque.
Pour naviguer à l'estime, il est nécessaire de connaître ces définitions :
- ETA : Estimated Time of Arrival en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé.
- la Route : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de Route vrai) ou par rapport au Nord magnétique (on parle de Route magnétique);
- le Cap : C'est la direction de la ligne de fois de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le cap compas), au Nord magnétique (le cap magnétique), ou au Nord vrai (le cap vrai).
- Le vent (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le vent effectif qui est la composante venant de face ou de l'arrière, et le vent de travers qui est la composante venant perpendiculairement à la trajectoire.
- la Dérive : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la correction de dérive ou angle de correction de dérive. En l'absence de vent de travers, le cap et la route sont identiques.
-
les composantes d'un vent quelconque.
-
La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive.
-
Après application d'un cap au vent pour créer un angle de correction de dérive.
Le computer de navigation
Un computer de navigation est une forme de règle à calcul circulaire utilisée dans l' aviation. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation.
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Durant le vol, le pilote navigue facilement grâce à la préparation menée au sol. Toutefois, il sera nécessaire d'évaluer et d'ajuster un certain nombre de paramètres, en croisière le pilote utilise des repères connus pour actualiser les éléments de navigation :
- Actualisation de la vitesse sol : Durant une ligne droite, il va être possible de déterminer sa vitesse sol réelle en fonction de la distance parcourue entre deux repères et le temps passé (chronomètre). Il est possible de corriger la vitesse sol estimée au départ.
- Actualisation de la vitesse et de la direction du vent : Grâce à la connaissance de la vitesse sol et de la dérive constatée en vol, le pilote peut en déduire la vitesse et la direction du vent (triangle des vitesse). Cet élément permet d'actualiser les corrections à apporter sur le prochain segment de navigation.
- Corrections de trajectoires : Si la route suivi n'est finalement pas la route escomptée, le pilote appliquera des corrections de trajectoire. Ces corrections permettent de revenir sur la route et sont plus ou moins forte suivant la nécessité de corriger l'écart rapidement (relief, espaces aériens, nécessité de se rapprocher d'un repère pour éviter l'égarement...)
- Révisions des ETA : L’ensemble des paramètres révisés permettent de conclure à une modification des ETA.
Pour la navigation à vue, et particulièrement la navigation à l'estime, le Journal de navigation ou Log de navigation est une technique de préparation des informations (au sol) et d'actualisation (en vol). Il s'agit d'un petit tableau regroupant les informations de navigation par ordre chronologique (points tournant, route magnétique, distance, carburant, ETA...etc). Bien que le format de base soit commun, chaque pilote peut y ajouter des informations qu'il souhaite retrouver facilement durant le vol. Ce document est créé lors de la préparation du vol et il est emmené en vol au même titre qu'une carte. Durant le vol, le pilote corrigera les informations en fonction de l'actualisation des paramètres.
-
Exemple de log de navigation complété.
-
Tracé exemple d'une navigation LFMX - Vinon - Gap sur une carte aéronautique au 1/500 000
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Utilisation du Service d'Information de Vol
Le Service d'Information de Vol, souvent appelé SIV (traduit de Flight Information Service ou FIS en anglais) est un service apporté à tout aéronef évoluant dans une Région d'information de vol (traduit de Flight Information Region ou FIR en anglais). Une FIR s'étant du sol au FL195. A l'intérieur d'une FIR, le Service d'Information de Vol peut être rendu par différentes entités, suivant l'endroit où l'aéronef évolue :
- Lorsque l'aéronef évolue dans un espace aérien contrôlé (classe d'espace E, D, C, B, A), il est rendu par les services du contrôle.
- Lorsque l'aéronef évolue en classe d'espace G, il est rendu par un centre de service de la circulation aérienne proche.
Pour l'aviation générale en France, le Service d'Information de Vol est disponible durant tout le vol. Dans le cadre du Service d'Information de Vol, l'organisme (contacté par radio) peut transmettre des renseignements (règlementation SERA, article SERA.9005):
- sur la disponibilité des services de radionavigation;
- sur les modifications de l’état des aérodromes et des installations et services connexes, y compris des renseignements sur l’état des aires de mouvement lorsque leurs caractéristiques sont modifiées par la présence de neige, de glace ou d’une épaisseur significative d’eau;
- sur les conditions météorologiques observées ou prévues aux aérodromes de départ, de destination et de dégagement;
- sur les risques de collision;
- sur les renseignements disponibles sur la circulation et les conditions météorologiques le long de la route lorsque ces conditions sont susceptibles de rendre impossible la poursuite du vol selon les règles de vol à vue ;
- sur tout autre renseignement susceptible d’avoir une incidence sur la sécurité.
- Cette liste est réduite aux informations utiles au vol en planeur.
Dès que besoin, le pilote peut bénéficier du SIV en contactant le service adéquat par radio. C'est un service gratuit, permettant d'augmenter le niveau de sécurité.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Bases de la propagation des ondes radioélectrique
Aujourd'hui, beaucoup de systèmes fonctionnent avec des ondes radioélectriques comme le téléphone sans fil ou la télévision. En aéronautique, la possibilité de transmettre des informations grâce à des ondes radioélectriques est très utile comme par exemple pour communiquer oralement, donner des informations de direction, ou encore des informations de position...etc.
Afin d'exploiter correctement ces systèmes, et surtout d'en connaître les limitations respectives, il est nécessaire d'aborder brièvement leur fonctionnement.
Caractéristiques des Antennes : Les ondes électromagnétiques sont émises par des antennes. La forme et la taille de l'antenne peut être très différent suivant :
- La fréquence de l'onde électromagnétique utilisée : Pour un même type d'antenne, plus la fréquence est élevée et plus l'antenne est petite.
- La directivité de l'antenne : Une antenne peut émettre dans toutes les directions (utile en communication radio), ou alors seulement dans une direction particulière (utile pour un radar). Toutes les antennes connaissent des "angles morts" où elles n'émettent (ou ne reçoivent) pas du tout.
- La puissance de l'onde à émettre : Une antenne de forte puissance ou prévue pour capter de très faibles signaux est généralement plus grande.
-
Antenne pour la communication VHF (118 à 137 MHz)
AJOUTER PHOTO ANTENNE Flarm, Antenne GPS, Antenne transpondeur, Antenne VOR, antenne VDF
La Propagation des ondes : Suivant la fréquence de l'onde utilisée, la propagation des ondes radio est différente. Les concepteurs des systèmes aéronautiques choisissent la fréquence la plus adaptée au besoin du système. Les 3 types de propagation sont :
- les ondes de sol (0.03 à 0.3 MHz) : C'est lorsque l'onde se propage en suivant la courbure de la terre. Utile pour établir des communication mondiales, mais la puissance nécessaire est très importante.
- les ondes de ciel (1 à 30MHz) : C'est lorsque l'onde est capable d'être réfléchie par une couche de l'atmosphère (la ionosphère) et sur le sol, permettant par exemple d'établir des communications entre deux vallées encaissées et des communications mondiales avec plusieurs rebonds.
- les ondes directes (30MHz et plus) : C'est lorsque l'onde se propage en ligne droite, et sont arrêtées par les obstacles. C'est la portée optique. Pour établir une transmission entre un émetteur et un récepteur, il faut que ces derniers puisse se voir. Les montagnes peuvent empêcher la propagation (les bâtiments dans une moindre mesure), mais c'est surtout le fait que la terre soit ronde qui limite la portée optique. Dans le cas du franchissement de l’horizon, plus l'émetteur et le récepteur sont haut, et plus la portée optique est grande. Il est possible de calculer la portée optique avec l'altitude de l'aéronef (h) en mètre : . Il faut noter que cette formule ne prend en compte que les contraintes géométriques de la Terre. En tenant compte de l'atmosphère terrestre, la portée est légèrement plus grande.
-
La propagation par onde de sol sur la surface de la Terre.
-
La propagation par onde de ciel réfléchie entre ciel et terre.
-
La propagation par onde directe (portée optique).
La puissance de l'onde : La puissance émise par une antenne se propage et se répartie dans plusieurs directions. Au fur et à mesure que l'onde s'éloigne de son antenne, sa puissance émise se dilue sur une zone de plus en plus grande. Il est possible que pour un récepteur très éloigné, la puissance soit trop diluée (trop faible) et qu'aucun signal ne soit détecté. La portée est donc limitée par la puissance émise et par la sensibilité du récepteur. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Radiogoniométrie au sol Le principe est de déterminer la direction d'une émission radioélectrique. Au sol, ce principe est utilisé par les services de la Circulation Aérienne pour déterminer d'où provient l'onde radioélectrique de l'aéronef qui est en train de parler. Pour eux, c'est une aide importante pour comprendre la situation rapidement. Pour le pilote planeur, l'information de QDR (Relèvement magnétique en code Q) peut être obtenue sur simple demande par radio :
- Avec le QDR provenant de deux organismes de contrôles différents et une carte, il est possible d'obtenir sa position.
- Avec le QDR provenant d'un contrôleur d'aérodrome, il est possible de calculer une route pour prendre la direction de l'aérodrome (QDM en code Q). Le QDM est l’inverse du QDR (QDM = QDR +/-180°).
En France, tous les organismes de contrôle aérien disposent normalement d'un Radiogoniomètre. Dès qu'une communication radio est établie (portée optique), il est possible d'obtenir un QDR ou un QDM. Voici un exemple de demande à faire par radio :
- "Orléans info du motoplaneur F-CCUY, je suis égaré, pouvez vous me donner un QDR par rapport à l'aérodrome d'Orléans?"
- "F-CCUY de Orléans info, vous êtes dans le relèvement magnétique 145°"
- "Orléans info du F-CCUY, 145°, je vous remercie"
La précision des systèmes de radiogoniométrie moderne est bonne.
NDB/ADF (Radiocompas)
Le radiocompas est un système basé sur la radiogoniométrie. Des balises au sol placées aux points clefs des trajectoires des aéronefs émettent en permanence sur une fréquence comprise entre 190 et 1 750 kHz (en France, principalement entre 280 et 450 kHz). A bord de l'aéronef, un système de radiogoniométrie permet de mesurer l'angle entre la balise et l'axe longitudinal de l'aéronef.
- NDB : Non Directional Beacon en anglais, Balise Non Directionnelle en français. Il s'agit du nom de la balise au sol.
- ADF : Automatic Directional Finder en anglais, Radiocompas en français. Il s'agit du nom de l'instrument implanté à bord de l'aéronef.
La fréquence utilisée permet la propagation en onde de sol. La portée n'est donc pas limité par l'horizon. Seule la puissance émettrice de la balise limite la portée.
Limitations du système ADF : le signal est affecté par les conditions atmosphériques, les terrains montagneux, la réfraction côtière et les orages, notamment sur les longues distances.
Utilisation :
- Le pilote souhaite exploitée une balise indiquée par sa carte;
- Il entre la fréquence de la balise sur son radiocompas;
- Pour vérifier que la bonne balise est sélectionnée, il écoute le message en morse qu'émet la balise toute les 15 secondes (3 lettres indiquées sur la carte);
- Le radiocompas pointe en direction de la balise.
-
Antenne NDB "NKR" à Leimen-Ochsenbach, Allemagne
-
Le symbole du NDB sur une carte. la fréquence de la balise est 428KHz, CTX est son identifiant émit en morse
-
radiocompas
VOR
Un système VOR (VHF Omnidirectional Range en anglais) permet de déterminer un relèvement magnétique par rapport à une station au sol (balise émetteur VOR dont la position est connue), et donc le radial sur lequel l'aéronef est situé. Par déduction, il permet de suivre n'importe quelle route passant par la station (en rapprochement ou en éloignement de celle-ci), ou même de déterminer la position exacte de l'avion en utilisant deux balises VOR (intersection de radiaux) ou un DME (intersection d'un radial et d'un arc DME).
La station au sol utilise la gamme de fréquences VHF de 108 à 117,95 MHz (donc une portée optique). Plus intéressant que le radiocompas, le VOR est moins soumis aux perturbations extérieures, telles celle de l'ionosphère ou simplement les nuages.
L'indicateur à bord qui permet de lire les indications du VOR se nome OBI (Omnidirectional Bearing Indicator en anglais). Il est composé de plusieurs indicateurs :
- le FLAG qui permet de savoir si on reçoit ou non le signal de la station VOR
- un bouton OBS (Omnidirectional Bearing Selector) pour choisir le radial auquel on souhaite se comparer
- une aiguille de déviation qui indique le résultat de la comparaison : si on se trouve à droite, à gauche ou sur le radial choisi
- derrière l'aiguille, une échelle indique l'amplitude de l'écart. Chaque point représente un écart de 2° soit une indication de 10° max de chaque côté
- un indicateur TO / FROM qui permet de savoir si on est en situation de rapprochement ou d’éloignement de la station sol
Utilisation :
- Le pilote souhaite exploitée une balise VOR indiquée par sa carte;
- Il entre la fréquence de la balise sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise (3 lettres indiquées sur la carte);
- Si le pilote souhaite intercepter un radial donné, il choisi le radial souhaité avec le bouton OBS et l'intercepte lorsque l'aiguille de déviation n'indique plus d'écart
- Si le pilote souhaite connaître le radial sur lequel il se trouve, il tourne le bouton OBS jusqu'a ce que l'aiguille de déviation n'indique plus déviation. L'indicateut TO/FROM lui permet de lever le doute entre QDR et QDM.
-
Vue aérienne d'un ensemble d'antenne d'une balise VOR de Sprimont "SPI" en Belgique
-
Le symbole du VOR sur une carte. la fréquence de la balise est 110.2MHz, DVL est son identifiant émit en morse
-
Omnidirectional Bearing Indicator. L'aiguille de déviation est au centre (5 graduations de chaque côté). L'indicateur TO/FROM indique FROM. Le radial sélectionné est le 252°.
DME
Un système DME (Distance Measuring Equipment en anglais) permet de connaître la distance oblique qui sépare un aéronef d'une station au sol en mesurant le temps que met une impulsion radioélectrique pour faire un aller-retour.
- Une station sol DME est typiquement implantée avec un VOR. On parle alors de station sol VOR/DME.
- Le DME est fonctionnellement identique au composant distance du TACAN, c'est dire qu'un utilisateur de DME peut exploiter les stations sol TACAN.
- Une station sol DME basse puissance peut être implantée avec un ILS pour mesurer la distance par rapport au seuil de piste lors d'une finale sans visibilité.
La station au sol utilise la gamme de fréquences UHF de 962 à 1 213 MHz (donc une portée optique) qui sont appariées à celles des VOR et des ILS : c'est à dire que la fréquence du DME est automatiquement sélectionnée lorsque le pilote renseigne la fréquence du VOR ou le l'ILS. A noter que c'est la distance oblique qui est mesurée, donc si l'aéronef passe à la verticale de la station sol, le DME indiquera la hauteur de l'aéronef.
l'OACI préconise une précision minimum de ±(0,25 milles nautiques + 1,25 % de la distance). Une station sol peut gérer environ 100 aéronefs. Au delà, elle ignore les aéronefs les plus loin.
Utilisation :
- Le pilote souhaite exploitée une balise VOR/DME indiquée par sa carte;
- Il entre la fréquence de la balise VOR sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise un peu plus aigüe que le code du VOR (3 lettres indiquées sur la carte);
- La distance oblique s'affiche à l'écran quelques secondes plus tard.
- Si l'aéronef est très éloigné par rapport à une station sol, il sera dans les premiers à perdre l'information si la balise devient saturée.
-
Vue d'antenne DME seule.
-
Le symbole du VOR/DME sur une carte. la fréquence du VOR 116.7MHz doit être sélectionnée pour utiliser le DME appariée, MOU est son identifiant émit en morse
-
Afficheur DME. En exploitant la variation de la distance en fonction du temps, il peut indiquer une vitesse sol radiale, et le temps restant pour atteindre la balise.
Les Radars
Radar primaire au sol
Le radar (acronyme issu de l'anglais RAdio Detection And Ranging) est un système qui utilise les ondes électromagnétiques pour détecter la présence et déterminer la position des aéronefs. Les ondes envoyées par l'émetteur sont réfléchies par la cible, et les signaux de retour (appelés écho-radar) sont captés et analysés par le récepteur. La distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne. L'altitude ne peut pas être mesurée, bien que les systèmes modernes et plus élaborés parviennent à donner une indication d'altitude.
Ce principe de Radar ne nécessite aucun instrument à bord de l'aéronef et est appelé Radar primaire. La fréquence utilisée est choisie pour être réfléchies par les aéronefs sans être (trop) perturbée par les phénomènes météo. La portée est la portée optique. Les puissances émises sont très importantes car l'onde doit faire le voyage aller, être partiellement réfléchie par l'aéronef, et faire le voyage retour.
Généralement, le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), et proche de lui (impossibilité de recevoir le signal tant que l'antenne émet). Comme le système est à portée optique, un aéronef en basse altitude masqué par un relief n'est pas visible. Ce type de radar n'est pas forcement disponible par tous les centres de contrôles.
Utilisation :
- le radar balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les échos-radar s'affichent sur l'écran du contrôleur aérien, mais le système ne donne aucune information sur ces plots radar.
- classiquement, le radar primaire ne permet pas de connaître l'altitude de l'aéronef
-
Principe du radar primaire.
-
Antenne du radar primaire, dans un couple radar primaire + radar secondaire.
-
Type d'écran de radar primaire non filtré avec tous les échos-radar parasites.
Radar de surveillance secondaire
Le radar secondaire (ou SSR pour Secondary Surveillance RADAR en anglais), est un dispositif radar de contrôle aérien qui « interroge » les aéronefs équipés d'un transpondeurs qui sont à sa portée. Les transpondeurs interrogés répondent au radar en envoyant le code à 4 chiffre entré par le pilote (ce code est communiqué par le contrôle aérien par radio). Les réponses des avions sont captées et analysées par le récepteur. Comme pour le radar primaire, la distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne, et l'altitude ne peut pas être mesurée. L’intérêt du radar secondaire est que chaque plot radar est identifié par le code à 4 chiffres permettant au contrôle aérien d'identifier sans ambiguïté qui est qui.
Pour être visible du contrôle aérien, il est impératif d'avoir un transpondeur en fonctionnement à bord de l'aéronef. La fréquence utilisée est de 1030MHz (interrogations radar sol) et 1090MHz (réponse du transpondeur). La portée est la portée optique (donc un aéronef en basse altitude masqué par un relief n'est pas visible). Les puissances émises sont moins importantes qu'un radar primaire car l'onde ne doit faire que le voyage aller. Le voyage retour est fait l'onde émise par le transpondeur.
Le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), ou proche de lui (technologie de Suppression des Lobes Secondaires) mais la zone est généralement couverte par une antenne voisine. Il a été constaté qu'un planeur en spirale peut temporairement disparaitre des écrans radar.
Les technologies de radar secondaire ont évolué au fil du temps :
- Le mode A : Le mode le plus basique. Le transpondeur répond avec le code SSR composé de 4 chiffres de 0 à 7.
- Le mode C : Le transpondeur répond avec le code SSR + l'altitude pression à laquelle se trouve l'aéronef. Sur l'écran du contrôleur, le plot radar apparait avec le code et l'altitude, permettant une gestion fine de la circulation aérienne.
- Le mode S : Le transpondeur répond avec le code SSR + l'altitude + l'immatriculation + d'autres informations...Sur l'écran du contrôleur, le plot radar apparait avec l'immatriculation et l'altitude. Ce mode permet au contrôleur une meilleure réactivité et de donner le même code SSR à plusieurs aéronefs.
En France en 2020, le radar secondaire mode S est disponible dans une majorité de centres de contrôles.
Lors d'un vol sans service ATS, le pilote peut mettre un code de sa propre initiative afin de transmettre un message particulier :
| Liste des codes SSR à connaître | |
|---|---|
| Code | Signification |
| 7000 | Code à utiliser France en l'absence de d'ATS, pour transmettre sa position et améliorer la sécurité. Obligatoire, sauf pour les aéronefs à autonomie électrique limitée (planeurs pur, ballons...) |
| 7500 | Code pour signifier une intervention illicite (détournement...) |
| 7600 | Code pour signifier une panne des moyens de communication radio |
| 7700 | Code pour signifier une situation d'urgence ou d'interception |
Aussi, le système TCAS (implanté généralement à bord des aéronefs de tailles moyennes) interrogent les transpondeurs de tous les autres aéronefs dans un rayon de quelques dizaines de kilomètres. La position des autres aéronefs est connu, permettant de prévenir les collisions.
- le pilote affiche le code 7000, ou un code donné par l'ATS par radio.
- le radar secondaire balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les réponses des transpondeurs s'affichent sur l'écran du contrôleur aérien. En fonction du Mode (A, C ou S), plus ou moins d'informations apparaissent à côté du plot radar.
- Le contrôleur peut demander à un pilote de mettre Transpondeur IDENT. Le pilote doit appuyer sur le bouton IDENT.
- Le plot radar apparait alors en surbrillance pendant quelques minutes, pour aider l'identification par le contrôleur.
-
Antenne du radar secondaire, dans un couple radar primaire + radar secondaire.
-
transpondeur à bord. Code actif 7000 (en haut), mode A + C + S. Noter le bouton Ident en haut à droite.
-
Type d'écran de radar secondaire. Aéronef 1 : mode C, Alt. 700ft, 70kt. Aéronef 2 : mode S, alt. 2600ft, 70kt. Aéronef 3 : mode S, alt. 200ft, 100kt.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation par satellite est une technique de navigation basé sur système de positionnement par satellites.
Un système de positionnement par satellites (ou GNSS pour Global Navigation Satellite System en anglais) est un ensemble de composants reposant sur une constellation de satellites artificiels permettant de déterminer sa position 3D, sa vitesse 3D et l'heure grâce à un récepteur portable de petite taille. Cette catégorie de système de géopositionnement a pour avantage une précision de l'ordre de 5 à 15 mètres, une couverture quasi-mondiale. A l’inverse, le type d'onde utilisée rend le système sensible aux obstacles présents entre le terminal récepteur et les satellites (immeubles, montagnes...).
En plus de cet ensemble, certains systèmes d'augmentation et de fiabilisation permettent de fiabiliser le système et d'améliorer les performances à une précision de quelques mètres (DGPS, EGNOS, Assisted GPS...).
Mise en œuvre
Le système GPS (le système développé par les États-Unis) repose sur une constellation d'une trentaine de satellites qui permet à un utilisateur, situé sur n'importe quel point du globe, d'avoir toujours au minimum quatre satellites à portée (dans l'hypothèse d'un environnement dégagé d'obstacles dit « clear sky »). Le terminal de l'utilisateur calcule sa position grâce au signal émis par chacun des satellites. À ce stade, la communication est mono-directionnelle, c'est-à-dire que le terminal de l'utilisateur ne fait que recevoir les signaux.
| Informations disponibles sur le récepteur en fonction du nombre de satellites en vue | |
|---|---|
| 2 satellites | Date et heure |
| 3 satellites | Date et heure + position horizontale (latitude et longitude) |
| 4 satellites et + | Date et heure + position horizontale + position verticale (altitude) |
Avantages
- Le système GNSS permet de se positionner très rapidement directement sur une carte.
- De nombreuses fonctions des récepteurs permettent aussi de programmer la route suivie: dans la navigation aérienne sous forme de points tournants pour faciliter le travail du pilote.
- En planeur, le récepteur peut calculer des plans de finesses pour rejoindre les aérodromes proches.
Inconvénients
- Il faut être très attentif au « système de coordonnées » utilisé, et bien régler le récepteur afin qu'il fournisse les coordonnées dans le système de référence utilisé actuellement en aéronautique : Le système WGS 84.
- L'utilisation de cette technique nécessite la présence « d'électricité » à bord (panne du système si manque d'énergie à bord, particulièrement pour les planeurs)
Le système GPS des États-Unis était le premier en service. Depuis, ces systèmes sont disponibles :
-
Antenne d'un récepteur GNSS, environ 3cm de côté. Elle doit avoir une vue dégagée vers le ciel.
-
Coordonnées de Latitude et Longitude données par un récepteur GNSS d'ancienne génération (sans carte)
-
Récepteurs GNSS à bord d'un planeur avec affichage sur carte interactive (au centre).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Exercices
Ces documents sont disponibles afin de stimuler l'apprentissage par d'autres moyens que la simple lecture. Chacun est libre de les utiliser comme il l'entend: en autonomie, dans le cadre d'un devoir donné par un ATO/DTO, en TP lors de cours en DTO...etc. Wiki-SPL.net propose le contenu mais n'a pas vocation à répondre aux demandes d'aides à l'apprentissage. Ce rôle est assuré par les formateurs des ATO/DTO dont il faudra se rapprocher !
- Cahier d’exercices N°1 Document à imprimer. Prévoir un matériel basique (règle, crayon, rapporteur...).
Magnétisme et compas
Le compas est un instrument de bord permettant de mesurer la direction en utilisant le champ magnétique terrestre. Son fonctionnement est similaire à celui d'une boussole. C'est un instrument simple, mais les limitations de la mesure grâce au champ magnétique sont multiples :
- Le champ magnétique terrestre n'est pas aligné avec l'axe de rotation de la terre. Le compas indique les directions par rapport à la direction du pôle Nord magnétique, qui n'est pas au même endroit que le pôle Nord géographique. On dit que la différence entre les deux directions magnétiques et géographiques est la déclinaison magnétique.
-
Déclinaison magnétique. Le compas indique le pôle Nord magnétique.
- Le Nord magnétique bouge notablement en 6 à 12mois. La déclinaison doit être mise à jour régulièrement. Des cartes spécifiques présentent la déclinaison en fonction de chaque position sur terre. Les lignes qui joignent les endroits d'égale déclinaison sont appelées lignes isogones. En France et à notre époque, par chance, la déclinaison est négligeable (proche de 0°).
-
Évolution de la déclinaison entre 1590 et 1990 en fonction de la position sur la Terre, par représentation des lignes isogones. Cliquer pour voir l'animation.
-
Lignes d'égale déclinaisons magnétiques (les isogones) en France en 2020 (en orange clair). Service de l’Information Aéronautique - Données originales téléchargées sur https://www.sia.aviation-civile.gouv.fr, mise à jour du 26 mars 2020.
- Le compas est instrument imparfait. Il n'indique pas parfaitement le Nord magnétique. Ceci est dû au compas lui-même mais aussi à l'installation dans l'aéronef. On dit que cette erreur est la déviation. Cette erreur dépend de la direction qu'il indique. Une table de correction est disponible à proximité immédiate du compas.
-
Courbe de déviation en fonction des directions mesurées pour un compas maritime.
-
Le cap compas indiqué est de 45°. La déviation indiquée par la table (en rouge) est entre -2° et -5°. Le cap magnétique est donc de l'ordre de 42°.
Afin d'obtenir la vrai direction, les erreurs de déclinaison et déviation doivent être retirées par calcul :
-
Correction de la déviation et de la déclinaison après lecture du cap compas. Dans l'autre sens, procéder aux correction en inversant le signe.
Le compas mesure la direction du champ magnétique là où il se trouve. Tout éléments qui génère un champ magnétique peut l'influencer, il en résultera une indication de direction très erronée. Le pilote doit prendre les précautions nécessaires pour garantir la bonne indication du compas :
- un aimant placé à proximité d'un compas : des aimants sont présents dans les casques utilisé dans les aéronefs, les téléphones...
- les systèmes électriques de l'aéronef génèrent divers champs magnétiques dû à la circulation du courant électriques dans les câbles. Le fonctionnement de certaines servitudes électriques peut donc influencer le compas.
- les masses métalliques ferromagnétiques, même sans être des aimants, posent problèmes. Un stylo qui possède un corps métallique à proximité immédiate d'un compas rend son indication fausse.
Enfin, le compas indique une valeur correcte en ligne droite en l'absence de turbulence importante. Il ne faut pas prendre en compte l'indication d'un compas :
- lors d'un virage;
- lors de turbulences importantes.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation aérienne est l'ensemble des techniques permettant à un pilote d'aéronef de maîtriser ses déplacements. La navigation permet à l'aéronef de suivre une trajectoire appelée route.
La navigation aérienne est largement héritière de la navigation maritime et la terminologie utilisée est identique.
Aux débuts de l'aviation, les navigations se faisaient à vue. En cas de conditions de visibilité dégradées, des phares aéronautiques jalonnaient certains tronçons de routes régulièrement empruntées, comme celle de l'Aéropostale qui amenaient le courrier de la France vers l'Afrique puis l’Amérique du Sud.
Au cours de la seconde moitié du XXe siècle, s’est développée la radionavigation. Au début du XXIe siècle, la navigation aérienne utilise largement le GPS.
Définitions
Le système solaire
Les variations saisonnières de la position du soleil sont créées par l'inclinaison de l'axe de rotation de la Terre par rapport au plan de son orbite autour du Soleil (écliptique). Pour un observateur terrestre, tout au long de l'année, le Soleil, bien que fixe, semble avoir une trajectoire différente dans le ciel. L'été est la saison où la journée dure le plus longtemps et le soleil monte le plus haut dans le ciel.
-
Alternance des saisons sur une année.
-
Mouvement apparent du soleil durant la journée pour un observateur situé dans l'hémisphère nord, en France
Se repérer sur la Terre
Afin de se repérer sur la sphère terrestre, la sphère est quadrillée par :
- Des Parallèles. Lorsqu'on se déplace vers le Nord ou le Sud (en restant sur le même méridien), on change de parallèle. Les Parallèles sont numérotés en degrés (0° étant l'équateur) plus une indication Nord ou Sud. le pôle Nord est numéroté 90°N. Paris se situe au niveau du parallèle 48,8°N. Il s'agit de la coordonnée de Latitude
- Des Méridiens. Lorsqu'on se déplace vers l'Ouest ou l'Est (en restant sur le même parallèle), on change de méridien. Les méridiens sont numérotés en degrés (0° étant le méridien passant par l'observatoire royal de Greenwich) plus une indication Ouest ou Est. Paris se situe au niveau du méridien 2,3°E. Il s'agit de la coordonnée de Longitude
-
Principaux parallèles, permettant de mesurer la Latitude et Principaux méridiens, permettant de mesurer la Longitude
Les coordonnées peuvent être exprimées de deux manières :
- Expression en degrés et décimale : La tour Eiffel à Paris se situe exactement aux coordonnées 48.8582N, 2.2945E
- Expression en degrés, minutes et secondes : parfois noté « DMS ». Chaque degré est divisé en 60minutes (1°=60'), puis chaque minute et divisé en 60secondes (1'=60"). La tour Eiffel se situe exactement aux coordonnées 48°51'29"N, 2°17'40"E
Les parallèles et les méridiens sont des arcs de cercles. Il est possible de les classer en 2 catégories :
- Ceux qui sont dit Grand cercles : l'arc de cercle à pour centre le centre de la terre, sont rayon est toujours égal à celui de la terre. Tous les méridiens sont des grand cercles. L'équateur est aussi un grand cercle.
- Ceux qui sont dit Petit cercles : tous les autres cercles n'ayant pas pour centre le centre de la terre. Mis a part l'équateur, tous les parallèles sont des petits cercles.
L'intérêt de cette classification est l'exploitation des Grands Cercles : leur périmètre est toujours égal au périmètre de la terre, c'est à dire environ 40 000km. Par exemple, tout déplacement de 0°01'00" en coordonnés le long d'un grand cercle fera toujours la même distance :
la longueur d'une minute d'arc (0°01'00") au niveau d'un grand cercle est la définition d'un Mille marin (nautique miles en anglais, noté NM). Cette astucieuse définition permet de calculer rapidement la distance qui sépare deux coordonnées. En ignorant les secondes d'arc, la distance entre la tour Eiffel (48°51'N, 2°17'E) et la tour de Pize (43°43'N, 10°23'E) est 05°08' sur l'axe Nord/Sud (soit 308NM).
Le temps
Le temps est une notion indispensable en navigation. Les divisions qui permettent de mesurer le temps sont faciles à appréhender et universelles : l'année, le jour, l'heure, la minute...etc. Le point de référence est beaucoup plus délicat car il en existe un certain nombre :
- LMT, Local Mean Time en anglais. C'est l'heure qui a pour référence le soleil. Lorsque le soleil est au zénith, la montre est réglée à 12h00. Cette référence dépend donc de la position géographique. Chaque endroit possède son heure LMT. Ce système est peu pratique et n'est quasiment plus utilisé aujourd'hui.
- Heures légales. Il s'agit d'une heure de référence pour un large territoire afin de résoudre les problèmes posés par l'heure LMT. Ce sont notamment les fuseaux horaires : la terre est décomposé en 24 fuseaux de 60minutes chacun qui possèdent tous leur propre heure légale de référence.
- UTC, Universal Time Coordinated en anglais. C'est une heure de référence mondiale, qui a pour référence le méridien d'origine 0°(Greenwich). A 12h UTC, le soleil est au zénith à Greenwich, mais il fait nuit dans l'Océan Pacifique. Les dénominations heure GMT] ou heure TU peuvent être considérées identique à l'heure UTC. Cette explication est en fait approximative mais suffisante pour le pilote planeur.
En aéronautique, les heures sont souvent définies en heure UTC car il est plus facile d’œuvrer avec une seule référence quelque soit le lieu ou le moment. Pour que le pilote puisse utiliser sa montre réglée en heure locale, il faudra ajouté l'écart entre l'heure UTC et son heure légale. En France, le décalage par rapport à l'heure UTC est : UTC+1 en hiver et UTC+2 en été.
La ligne de changement de date est une ligne imaginaire, à la surface de la Terre, approximativement située au 180e méridien (est et ouest) dans l'océan Pacifique ; son rôle est d'indiquer l'endroit où il est nécessaire de changer de date quand on la traverse. Les pilotes planeur européen sont peu concerné par cette notion.
Afin de définir les heures auxquelles la luminosité est suffisante pour entreprendre un vol VFR de jour, il est nécessaire de définir :
- le lever du soleil, SunRise en anglais (SR) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le matin.
- Le coucher du soleil, SunSet en anglais (SS) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le soir.
- le crépuscule civil : C'est la période où le centre du Soleil est situé à moins de 6° sous la ligne d'horizon.
La journée aéronautique durant laquelle le vol VFR de jour est possible commence au début du crépuscule avant le lever du soleil et se termine à la fin du crépuscule après le coucher du soleil. Aux latitudes moyennes (30 à 60°) cette définition est souvent simplifié, la journée aéronautique commence à SR-30min et se termine à SS+30min
Les directions
Afin de donner une direction, les points cardinaux sont utilisés. Pour un degré de précision plus important dans l'expression d'une direction, un angle est exprimé en prenant le Nord comme référence.
-
Rose des vents, indiquant les points cardinaux.
-
Rapporteur permettant d'exprimer une direction par un angle.
Les Distances
Les distances horizontales sont exprimées en Mille marin ou en kilomètres.
- Pour convertir rapidement des Nautiques Miles en kilomètres par calcul mental, une bonne approximation (erreur de 3%) est : prendre le double (x2), et retirer 1/10e.
Les distances verticales sont exprimées en Pied ou en Mètre.
- Pour convertir rapidement des Pieds en Mètres par calcul mental, une bonne approximation (erreur de 1.5%) est : multiplier par dix (x10), diviser par trois (/3).
- Pour convertir rapidement des Mètres en Pieds par calcul mental, une bonne approximation (erreur de 1.5%) est : diviser par dix (/10), multiplier par trois (x3).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Magnétisme et compas
Le compas est un instrument de bord permettant de mesurer la direction en utilisant le champ magnétique terrestre. Son fonctionnement est similaire à celui d'une boussole. C'est un instrument simple, mais les limitations de la mesure grâce au champ magnétique sont multiples :
- Le champ magnétique terrestre n'est pas aligné avec l'axe de rotation de la terre. Le compas indique les directions par rapport à la direction du pôle Nord magnétique, qui n'est pas au même endroit que le pôle Nord géographique. On dit que la différence entre les deux directions magnétiques et géographiques est la déclinaison magnétique.
-
Déclinaison magnétique. Le compas indique le pôle Nord magnétique.
- Le Nord magnétique bouge notablement en 6 à 12mois. La déclinaison doit être mise à jour régulièrement. Des cartes spécifiques présentent la déclinaison en fonction de chaque position sur terre. Les lignes qui joignent les endroits d'égale déclinaison sont appelées lignes isogones. En France et à notre époque, par chance, la déclinaison est négligeable (proche de 0°).
-
Évolution de la déclinaison entre 1590 et 1990 en fonction de la position sur la Terre, par représentation des lignes isogones. Cliquer pour voir l'animation.
-
Lignes d'égale déclinaisons magnétiques (les isogones) en France en 2020 (en orange clair). Service de l’Information Aéronautique - Données originales téléchargées sur https://www.sia.aviation-civile.gouv.fr, mise à jour du 26 mars 2020.
- Le compas est instrument imparfait. Il n'indique pas parfaitement le Nord magnétique. Ceci est dû au compas lui-même mais aussi à l'installation dans l'aéronef. On dit que cette erreur est la déviation. Cette erreur dépend de la direction qu'il indique. Une table de correction est disponible à proximité immédiate du compas.
-
Courbe de déviation en fonction des directions mesurées pour un compas maritime.
-
Le cap compas indiqué est de 45°. La déviation indiquée par la table (en rouge) est entre -2° et -5°. Le cap magnétique est donc de l'ordre de 42°.
Afin d'obtenir la vrai direction, les erreurs de déclinaison et déviation doivent être retirées par calcul :
-
Correction de la déviation et de la déclinaison après lecture du cap compas. Dans l'autre sens, procéder aux correction en inversant le signe.
Le compas mesure la direction du champ magnétique là où il se trouve. Tout éléments qui génère un champ magnétique peut l'influencer, il en résultera une indication de direction très erronée. Le pilote doit prendre les précautions nécessaires pour garantir la bonne indication du compas :
- un aimant placé à proximité d'un compas : des aimants sont présents dans les casques utilisé dans les aéronefs, les téléphones...
- les systèmes électriques de l'aéronef génèrent divers champs magnétiques dû à la circulation du courant électriques dans les câbles. Le fonctionnement de certaines servitudes électriques peut donc influencer le compas.
- les masses métalliques ferromagnétiques, même sans être des aimants, posent problèmes. Un stylo qui possède un corps métallique à proximité immédiate d'un compas rend son indication fausse.
Enfin, le compas indique une valeur correcte en ligne droite en l'absence de turbulence importante. Il ne faut pas prendre en compte l'indication d'un compas :
- lors d'un virage;
- lors de turbulences importantes.
Modèle en boucle détecté : 9-3 Cartes (motoplaneurs) Modèle en boucle détecté : 9- Navigation (motoplaneurs)
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a trois méthodes de navigation :
Le cheminement
Cheminer consiste à utiliser les repères au sol caractéristiques et bien visibles depuis un aéronef. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps. On appelle aussi cheminement le fait de se diriger, à vue, de repères en repères situés à proximité l'un de l'autre.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
En vol, il est courant de confondre différents repères et ainsi avancer dans une mauvaise direction. A court terme, cela engendre une situation d’égarement. Pour garder une bonne conscience de la situation, le pilote doit évaluer le niveau de certitude de sa position :
- 1 à 2 repères = position peu sûre à conforter au plus vite,
- 3 à 4 repères = position fiable,
- 5 à 6 repères = position très fiable...
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct (une ligne droite) et que le cheminement n'est pas possible par manque de repères (ou des repères trop éloignés l'un de l'autre).
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères.
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon.
Pour naviguer à l'estime, les notions entre les différentes Vitesses sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées :
- La Vitesse Indiquée : En vol, l'indicateur de vitesse affiche la Vitesse Indiquée (VI ou IAS pour Indicated Air Speed en anglais). Cette indication n'est pas exacte.
- La Vitesse Conventionnelle : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument. Lorsque besoin, le manuel de vol explique la façon de déduire la Vc depuis la Vi (Vc ou CAS pour Calibrated Air Speed en anglais);
- La Vitesse Vrai : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou TAS pour True Air Speed en anglais);
- La Vitesse Propre : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp);
- La Vitesse équivalente : C'est la vitesse d'un aéronef, corrigée des effets de la compressibilité à l'altitude donnée (Ev ou EAS pour Equivalent Air Speed en anglais)
- La Vitesse sol : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou GS pour Ground Speed en anglais). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation).
-
Vent de face, la vitesse sol est plus faible.
-
Vent arrière, la vitesse sol est plus élevée.
-
les composantes d'un vent quelconque.
Pour naviguer à l'estime, il est nécessaire de connaître ces définitions :
- ETA : Estimated Time of Arrival en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé.
- la Route : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de Route vrai) ou par rapport au Nord magnétique (on parle de Route magnétique);
- le Cap : C'est la direction de la ligne de fois de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le cap compas), au Nord magnétique (le cap magnétique), ou au Nord vrai (le cap vrai).
- Le vent (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le vent effectif qui est la composante venant de face ou de l'arrière, et le vent de travers qui est la composante venant perpendiculairement à la trajectoire.
- la Dérive : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la correction de dérive ou angle de correction de dérive. En l'absence de vent de travers, le cap et la route sont identiques.
-
les composantes d'un vent quelconque.
-
La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive.
-
Après application d'un cap au vent pour créer un angle de correction de dérive.
Le computer de navigation
Un computer de navigation est une forme de règle à calcul circulaire utilisée dans l' aviation. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation.
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Durant le vol, le pilote navigue facilement grâce à la préparation menée au sol. Toutefois, il sera nécessaire d'évaluer et d'ajuster un certain nombre de paramètres, en croisière le pilote utilise des repères connus pour actualiser les éléments de navigation :
- Actualisation de la vitesse sol : Durant une ligne droite, il va être possible de déterminer sa vitesse sol réelle en fonction de la distance parcourue entre deux repères et le temps passé (chronomètre). Il est possible de corriger la vitesse sol estimée au départ.
- Actualisation de la vitesse et de la direction du vent : Grâce à la connaissance de la vitesse sol et de la dérive constatée en vol, le pilote peut en déduire la vitesse et la direction du vent (triangle des vitesse). Cet élément permet d'actualiser les corrections à apporter sur le prochain segment de navigation.
- Corrections de trajectoires : Si la route suivi n'est finalement pas la route escomptée, le pilote appliquera des corrections de trajectoire. Ces corrections permettent de revenir sur la route et sont plus ou moins forte suivant la nécessité de corriger l'écart rapidement (relief, espaces aériens, nécessité de se rapprocher d'un repère pour éviter l'égarement...)
- Révisions des ETA : L’ensemble des paramètres révisés permettent de conclure à une modification des ETA.
Pour la navigation à vue, et particulièrement la navigation à l'estime, le Journal de navigation ou Log de navigation est une technique de préparation des informations (au sol) et d'actualisation (en vol). Il s'agit d'un petit tableau regroupant les informations de navigation par ordre chronologique (points tournant, route magnétique, distance, carburant, ETA...etc). Bien que le format de base soit commun, chaque pilote peut y ajouter des informations qu'il souhaite retrouver facilement durant le vol. Ce document est créé lors de la préparation du vol et il est emmené en vol au même titre qu'une carte. Durant le vol, le pilote corrigera les informations en fonction de l'actualisation des paramètres.
-
Exemple de log de navigation complété.
-
Tracé exemple d'une navigation LFMX - Vinon - Gap sur une carte aéronautique au 1/500 000
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Utilisation du Service d'Information de Vol
Le Service d'Information de Vol, souvent appelé SIV (traduit de Flight Information Service ou FIS en anglais) est un service apporté à tout aéronef évoluant dans une Région d'information de vol (traduit de Flight Information Region ou FIR en anglais). Une FIR s'étant du sol au FL195. A l'intérieur d'une FIR, le Service d'Information de Vol peut être rendu par différentes entités, suivant l'endroit où l'aéronef évolue :
- Lorsque l'aéronef évolue dans un espace aérien contrôlé (classe d'espace E, D, C, B, A), il est rendu par les services du contrôle.
- Lorsque l'aéronef évolue en classe d'espace G, il est rendu par un centre de service de la circulation aérienne proche.
Pour l'aviation générale en France, le Service d'Information de Vol est disponible durant tout le vol. Dans le cadre du Service d'Information de Vol, l'organisme (contacté par radio) peut transmettre des renseignements (règlementation SERA, article SERA.9005):
- sur la disponibilité des services de radionavigation;
- sur les modifications de l’état des aérodromes et des installations et services connexes, y compris des renseignements sur l’état des aires de mouvement lorsque leurs caractéristiques sont modifiées par la présence de neige, de glace ou d’une épaisseur significative d’eau;
- sur les conditions météorologiques observées ou prévues aux aérodromes de départ, de destination et de dégagement;
- sur les risques de collision;
- sur les renseignements disponibles sur la circulation et les conditions météorologiques le long de la route lorsque ces conditions sont susceptibles de rendre impossible la poursuite du vol selon les règles de vol à vue ;
- sur tout autre renseignement susceptible d’avoir une incidence sur la sécurité.
- Cette liste est réduite aux informations utiles au vol en planeur.
Dès que besoin, le pilote peut bénéficier du SIV en contactant le service adéquat par radio. C'est un service gratuit, permettant d'augmenter le niveau de sécurité.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Bases de la propagation des ondes radioélectrique
Aujourd'hui, beaucoup de systèmes fonctionnent avec des ondes radioélectriques comme le téléphone sans fil ou la télévision. En aéronautique, la possibilité de transmettre des informations grâce à des ondes radioélectriques est très utile comme par exemple pour communiquer oralement, donner des informations de direction, ou encore des informations de position...etc.
Afin d'exploiter correctement ces systèmes, et surtout d'en connaître les limitations respectives, il est nécessaire d'aborder brièvement leur fonctionnement.
Caractéristiques des Antennes : Les ondes électromagnétiques sont émises par des antennes. La forme et la taille de l'antenne peut être très différent suivant :
- La fréquence de l'onde électromagnétique utilisée : Pour un même type d'antenne, plus la fréquence est élevée et plus l'antenne est petite.
- La directivité de l'antenne : Une antenne peut émettre dans toutes les directions (utile en communication radio), ou alors seulement dans une direction particulière (utile pour un radar). Toutes les antennes connaissent des "angles morts" où elles n'émettent (ou ne reçoivent) pas du tout.
- La puissance de l'onde à émettre : Une antenne de forte puissance ou prévue pour capter de très faibles signaux est généralement plus grande.
-
Antenne pour la communication VHF (118 à 137 MHz)
AJOUTER PHOTO ANTENNE Flarm, Antenne GPS, Antenne transpondeur, Antenne VOR, antenne VDF
La Propagation des ondes : Suivant la fréquence de l'onde utilisée, la propagation des ondes radio est différente. Les concepteurs des systèmes aéronautiques choisissent la fréquence la plus adaptée au besoin du système. Les 3 types de propagation sont :
- les ondes de sol (0.03 à 0.3 MHz) : C'est lorsque l'onde se propage en suivant la courbure de la terre. Utile pour établir des communication mondiales, mais la puissance nécessaire est très importante.
- les ondes de ciel (1 à 30MHz) : C'est lorsque l'onde est capable d'être réfléchie par une couche de l'atmosphère (la ionosphère) et sur le sol, permettant par exemple d'établir des communications entre deux vallées encaissées et des communications mondiales avec plusieurs rebonds.
- les ondes directes (30MHz et plus) : C'est lorsque l'onde se propage en ligne droite, et sont arrêtées par les obstacles. C'est la portée optique. Pour établir une transmission entre un émetteur et un récepteur, il faut que ces derniers puisse se voir. Les montagnes peuvent empêcher la propagation (les bâtiments dans une moindre mesure), mais c'est surtout le fait que la terre soit ronde qui limite la portée optique. Dans le cas du franchissement de l’horizon, plus l'émetteur et le récepteur sont haut, et plus la portée optique est grande. Il est possible de calculer la portée optique avec l'altitude de l'aéronef (h) en mètre : . Il faut noter que cette formule ne prend en compte que les contraintes géométriques de la Terre. En tenant compte de l'atmosphère terrestre, la portée est légèrement plus grande.
-
La propagation par onde de sol sur la surface de la Terre.
-
La propagation par onde de ciel réfléchie entre ciel et terre.
-
La propagation par onde directe (portée optique).
La puissance de l'onde : La puissance émise par une antenne se propage et se répartie dans plusieurs directions. Au fur et à mesure que l'onde s'éloigne de son antenne, sa puissance émise se dilue sur une zone de plus en plus grande. Il est possible que pour un récepteur très éloigné, la puissance soit trop diluée (trop faible) et qu'aucun signal ne soit détecté. La portée est donc limitée par la puissance émise et par la sensibilité du récepteur. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Radiogoniométrie au sol Le principe est de déterminer la direction d'une émission radioélectrique. Au sol, ce principe est utilisé par les services de la Circulation Aérienne pour déterminer d'où provient l'onde radioélectrique de l'aéronef qui est en train de parler. Pour eux, c'est une aide importante pour comprendre la situation rapidement. Pour le pilote planeur, l'information de QDR (Relèvement magnétique en code Q) peut être obtenue sur simple demande par radio :
- Avec le QDR provenant de deux organismes de contrôles différents et une carte, il est possible d'obtenir sa position.
- Avec le QDR provenant d'un contrôleur d'aérodrome, il est possible de calculer une route pour prendre la direction de l'aérodrome (QDM en code Q). Le QDM est l’inverse du QDR (QDM = QDR +/-180°).
En France, tous les organismes de contrôle aérien disposent normalement d'un Radiogoniomètre. Dès qu'une communication radio est établie (portée optique), il est possible d'obtenir un QDR ou un QDM. Voici un exemple de demande à faire par radio :
- "Orléans info du motoplaneur F-CCUY, je suis égaré, pouvez vous me donner un QDR par rapport à l'aérodrome d'Orléans?"
- "F-CCUY de Orléans info, vous êtes dans le relèvement magnétique 145°"
- "Orléans info du F-CCUY, 145°, je vous remercie"
La précision des systèmes de radiogoniométrie moderne est bonne.
NDB/ADF (Radiocompas)
Le radiocompas est un système basé sur la radiogoniométrie. Des balises au sol placées aux points clefs des trajectoires des aéronefs émettent en permanence sur une fréquence comprise entre 190 et 1 750 kHz (en France, principalement entre 280 et 450 kHz). A bord de l'aéronef, un système de radiogoniométrie permet de mesurer l'angle entre la balise et l'axe longitudinal de l'aéronef.
- NDB : Non Directional Beacon en anglais, Balise Non Directionnelle en français. Il s'agit du nom de la balise au sol.
- ADF : Automatic Directional Finder en anglais, Radiocompas en français. Il s'agit du nom de l'instrument implanté à bord de l'aéronef.
La fréquence utilisée permet la propagation en onde de sol. La portée n'est donc pas limité par l'horizon. Seule la puissance émettrice de la balise limite la portée.
Limitations du système ADF : le signal est affecté par les conditions atmosphériques, les terrains montagneux, la réfraction côtière et les orages, notamment sur les longues distances.
Utilisation :
- Le pilote souhaite exploitée une balise indiquée par sa carte;
- Il entre la fréquence de la balise sur son radiocompas;
- Pour vérifier que la bonne balise est sélectionnée, il écoute le message en morse qu'émet la balise toute les 15 secondes (3 lettres indiquées sur la carte);
- Le radiocompas pointe en direction de la balise.
-
Antenne NDB "NKR" à Leimen-Ochsenbach, Allemagne
-
Le symbole du NDB sur une carte. la fréquence de la balise est 428KHz, CTX est son identifiant émit en morse
-
radiocompas
VOR
Un système VOR (VHF Omnidirectional Range en anglais) permet de déterminer un relèvement magnétique par rapport à une station au sol (balise émetteur VOR dont la position est connue), et donc le radial sur lequel l'aéronef est situé. Par déduction, il permet de suivre n'importe quelle route passant par la station (en rapprochement ou en éloignement de celle-ci), ou même de déterminer la position exacte de l'avion en utilisant deux balises VOR (intersection de radiaux) ou un DME (intersection d'un radial et d'un arc DME).
La station au sol utilise la gamme de fréquences VHF de 108 à 117,95 MHz (donc une portée optique). Plus intéressant que le radiocompas, le VOR est moins soumis aux perturbations extérieures, telles celle de l'ionosphère ou simplement les nuages.
L'indicateur à bord qui permet de lire les indications du VOR se nome OBI (Omnidirectional Bearing Indicator en anglais). Il est composé de plusieurs indicateurs :
- le FLAG qui permet de savoir si on reçoit ou non le signal de la station VOR
- un bouton OBS (Omnidirectional Bearing Selector) pour choisir le radial auquel on souhaite se comparer
- une aiguille de déviation qui indique le résultat de la comparaison : si on se trouve à droite, à gauche ou sur le radial choisi
- derrière l'aiguille, une échelle indique l'amplitude de l'écart. Chaque point représente un écart de 2° soit une indication de 10° max de chaque côté
- un indicateur TO / FROM qui permet de savoir si on est en situation de rapprochement ou d’éloignement de la station sol
Utilisation :
- Le pilote souhaite exploitée une balise VOR indiquée par sa carte;
- Il entre la fréquence de la balise sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise (3 lettres indiquées sur la carte);
- Si le pilote souhaite intercepter un radial donné, il choisi le radial souhaité avec le bouton OBS et l'intercepte lorsque l'aiguille de déviation n'indique plus d'écart
- Si le pilote souhaite connaître le radial sur lequel il se trouve, il tourne le bouton OBS jusqu'a ce que l'aiguille de déviation n'indique plus déviation. L'indicateut TO/FROM lui permet de lever le doute entre QDR et QDM.
-
Vue aérienne d'un ensemble d'antenne d'une balise VOR de Sprimont "SPI" en Belgique
-
Le symbole du VOR sur une carte. la fréquence de la balise est 110.2MHz, DVL est son identifiant émit en morse
-
Omnidirectional Bearing Indicator. L'aiguille de déviation est au centre (5 graduations de chaque côté). L'indicateur TO/FROM indique FROM. Le radial sélectionné est le 252°.
DME
Un système DME (Distance Measuring Equipment en anglais) permet de connaître la distance oblique qui sépare un aéronef d'une station au sol en mesurant le temps que met une impulsion radioélectrique pour faire un aller-retour.
- Une station sol DME est typiquement implantée avec un VOR. On parle alors de station sol VOR/DME.
- Le DME est fonctionnellement identique au composant distance du TACAN, c'est dire qu'un utilisateur de DME peut exploiter les stations sol TACAN.
- Une station sol DME basse puissance peut être implantée avec un ILS pour mesurer la distance par rapport au seuil de piste lors d'une finale sans visibilité.
La station au sol utilise la gamme de fréquences UHF de 962 à 1 213 MHz (donc une portée optique) qui sont appariées à celles des VOR et des ILS : c'est à dire que la fréquence du DME est automatiquement sélectionnée lorsque le pilote renseigne la fréquence du VOR ou le l'ILS. A noter que c'est la distance oblique qui est mesurée, donc si l'aéronef passe à la verticale de la station sol, le DME indiquera la hauteur de l'aéronef.
l'OACI préconise une précision minimum de ±(0,25 milles nautiques + 1,25 % de la distance). Une station sol peut gérer environ 100 aéronefs. Au delà, elle ignore les aéronefs les plus loin.
Utilisation :
- Le pilote souhaite exploitée une balise VOR/DME indiquée par sa carte;
- Il entre la fréquence de la balise VOR sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise un peu plus aigüe que le code du VOR (3 lettres indiquées sur la carte);
- La distance oblique s'affiche à l'écran quelques secondes plus tard.
- Si l'aéronef est très éloigné par rapport à une station sol, il sera dans les premiers à perdre l'information si la balise devient saturée.
-
Vue d'antenne DME seule.
-
Le symbole du VOR/DME sur une carte. la fréquence du VOR 116.7MHz doit être sélectionnée pour utiliser le DME appariée, MOU est son identifiant émit en morse
-
Afficheur DME. En exploitant la variation de la distance en fonction du temps, il peut indiquer une vitesse sol radiale, et le temps restant pour atteindre la balise.
Les Radars
Radar primaire au sol
Le radar (acronyme issu de l'anglais RAdio Detection And Ranging) est un système qui utilise les ondes électromagnétiques pour détecter la présence et déterminer la position des aéronefs. Les ondes envoyées par l'émetteur sont réfléchies par la cible, et les signaux de retour (appelés écho-radar) sont captés et analysés par le récepteur. La distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne. L'altitude ne peut pas être mesurée, bien que les systèmes modernes et plus élaborés parviennent à donner une indication d'altitude.
Ce principe de Radar ne nécessite aucun instrument à bord de l'aéronef et est appelé Radar primaire. La fréquence utilisée est choisie pour être réfléchies par les aéronefs sans être (trop) perturbée par les phénomènes météo. La portée est la portée optique. Les puissances émises sont très importantes car l'onde doit faire le voyage aller, être partiellement réfléchie par l'aéronef, et faire le voyage retour.
Généralement, le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), et proche de lui (impossibilité de recevoir le signal tant que l'antenne émet). Comme le système est à portée optique, un aéronef en basse altitude masqué par un relief n'est pas visible. Ce type de radar n'est pas forcement disponible par tous les centres de contrôles.
Utilisation :
- le radar balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les échos-radar s'affichent sur l'écran du contrôleur aérien, mais le système ne donne aucune information sur ces plots radar.
- classiquement, le radar primaire ne permet pas de connaître l'altitude de l'aéronef
-
Principe du radar primaire.
-
Antenne du radar primaire, dans un couple radar primaire + radar secondaire.
-
Type d'écran de radar primaire non filtré avec tous les échos-radar parasites.
Radar de surveillance secondaire
Le radar secondaire (ou SSR pour Secondary Surveillance RADAR en anglais), est un dispositif radar de contrôle aérien qui « interroge » les aéronefs équipés d'un transpondeurs qui sont à sa portée. Les transpondeurs interrogés répondent au radar en envoyant le code à 4 chiffre entré par le pilote (ce code est communiqué par le contrôle aérien par radio). Les réponses des avions sont captées et analysées par le récepteur. Comme pour le radar primaire, la distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne, et l'altitude ne peut pas être mesurée. L’intérêt du radar secondaire est que chaque plot radar est identifié par le code à 4 chiffres permettant au contrôle aérien d'identifier sans ambiguïté qui est qui.
Pour être visible du contrôle aérien, il est impératif d'avoir un transpondeur en fonctionnement à bord de l'aéronef. La fréquence utilisée est de 1030MHz (interrogations radar sol) et 1090MHz (réponse du transpondeur). La portée est la portée optique (donc un aéronef en basse altitude masqué par un relief n'est pas visible). Les puissances émises sont moins importantes qu'un radar primaire car l'onde ne doit faire que le voyage aller. Le voyage retour est fait l'onde émise par le transpondeur.
Le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), ou proche de lui (technologie de Suppression des Lobes Secondaires) mais la zone est généralement couverte par une antenne voisine. Il a été constaté qu'un planeur en spirale peut temporairement disparaitre des écrans radar.
Les technologies de radar secondaire ont évolué au fil du temps :
- Le mode A : Le mode le plus basique. Le transpondeur répond avec le code SSR composé de 4 chiffres de 0 à 7.
- Le mode C : Le transpondeur répond avec le code SSR + l'altitude pression à laquelle se trouve l'aéronef. Sur l'écran du contrôleur, le plot radar apparait avec le code et l'altitude, permettant une gestion fine de la circulation aérienne.
- Le mode S : Le transpondeur répond avec le code SSR + l'altitude + l'immatriculation + d'autres informations...Sur l'écran du contrôleur, le plot radar apparait avec l'immatriculation et l'altitude. Ce mode permet au contrôleur une meilleure réactivité et de donner le même code SSR à plusieurs aéronefs.
En France en 2020, le radar secondaire mode S est disponible dans une majorité de centres de contrôles.
Lors d'un vol sans service ATS, le pilote peut mettre un code de sa propre initiative afin de transmettre un message particulier :
| Liste des codes SSR à connaître | |
|---|---|
| Code | Signification |
| 7000 | Code à utiliser France en l'absence de d'ATS, pour transmettre sa position et améliorer la sécurité. Obligatoire, sauf pour les aéronefs à autonomie électrique limitée (planeurs pur, ballons...) |
| 7500 | Code pour signifier une intervention illicite (détournement...) |
| 7600 | Code pour signifier une panne des moyens de communication radio |
| 7700 | Code pour signifier une situation d'urgence ou d'interception |
Aussi, le système TCAS (implanté généralement à bord des aéronefs de tailles moyennes) interrogent les transpondeurs de tous les autres aéronefs dans un rayon de quelques dizaines de kilomètres. La position des autres aéronefs est connu, permettant de prévenir les collisions.
- le pilote affiche le code 7000, ou un code donné par l'ATS par radio.
- le radar secondaire balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les réponses des transpondeurs s'affichent sur l'écran du contrôleur aérien. En fonction du Mode (A, C ou S), plus ou moins d'informations apparaissent à côté du plot radar.
- Le contrôleur peut demander à un pilote de mettre Transpondeur IDENT. Le pilote doit appuyer sur le bouton IDENT.
- Le plot radar apparait alors en surbrillance pendant quelques minutes, pour aider l'identification par le contrôleur.
-
Antenne du radar secondaire, dans un couple radar primaire + radar secondaire.
-
transpondeur à bord. Code actif 7000 (en haut), mode A + C + S. Noter le bouton Ident en haut à droite.
-
Type d'écran de radar secondaire. Aéronef 1 : mode C, Alt. 700ft, 70kt. Aéronef 2 : mode S, alt. 2600ft, 70kt. Aéronef 3 : mode S, alt. 200ft, 100kt.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation par satellite est une technique de navigation basé sur système de positionnement par satellites.
Un système de positionnement par satellites (ou GNSS pour Global Navigation Satellite System en anglais) est un ensemble de composants reposant sur une constellation de satellites artificiels permettant de déterminer sa position 3D, sa vitesse 3D et l'heure grâce à un récepteur portable de petite taille. Cette catégorie de système de géopositionnement a pour avantage une précision de l'ordre de 5 à 15 mètres, une couverture quasi-mondiale. A l’inverse, le type d'onde utilisée rend le système sensible aux obstacles présents entre le terminal récepteur et les satellites (immeubles, montagnes...).
En plus de cet ensemble, certains systèmes d'augmentation et de fiabilisation permettent de fiabiliser le système et d'améliorer les performances à une précision de quelques mètres (DGPS, EGNOS, Assisted GPS...).
Mise en œuvre
Le système GPS (le système développé par les États-Unis) repose sur une constellation d'une trentaine de satellites qui permet à un utilisateur, situé sur n'importe quel point du globe, d'avoir toujours au minimum quatre satellites à portée (dans l'hypothèse d'un environnement dégagé d'obstacles dit « clear sky »). Le terminal de l'utilisateur calcule sa position grâce au signal émis par chacun des satellites. À ce stade, la communication est mono-directionnelle, c'est-à-dire que le terminal de l'utilisateur ne fait que recevoir les signaux.
| Informations disponibles sur le récepteur en fonction du nombre de satellites en vue | |
|---|---|
| 2 satellites | Date et heure |
| 3 satellites | Date et heure + position horizontale (latitude et longitude) |
| 4 satellites et + | Date et heure + position horizontale + position verticale (altitude) |
Avantages
- Le système GNSS permet de se positionner très rapidement directement sur une carte.
- De nombreuses fonctions des récepteurs permettent aussi de programmer la route suivie: dans la navigation aérienne sous forme de points tournants pour faciliter le travail du pilote.
- En planeur, le récepteur peut calculer des plans de finesses pour rejoindre les aérodromes proches.
Inconvénients
- Il faut être très attentif au « système de coordonnées » utilisé, et bien régler le récepteur afin qu'il fournisse les coordonnées dans le système de référence utilisé actuellement en aéronautique : Le système WGS 84.
- L'utilisation de cette technique nécessite la présence « d'électricité » à bord (panne du système si manque d'énergie à bord, particulièrement pour les planeurs)
Le système GPS des États-Unis était le premier en service. Depuis, ces systèmes sont disponibles :
-
Antenne d'un récepteur GNSS, environ 3cm de côté. Elle doit avoir une vue dégagée vers le ciel.
-
Coordonnées de Latitude et Longitude données par un récepteur GNSS d'ancienne génération (sans carte)
-
Récepteurs GNSS à bord d'un planeur avec affichage sur carte interactive (au centre).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Exercices
Ces documents sont disponibles afin de stimuler l'apprentissage par d'autres moyens que la simple lecture. Chacun est libre de les utiliser comme il l'entend: en autonomie, dans le cadre d'un devoir donné par un ATO/DTO, en TP lors de cours en DTO...etc. Wiki-SPL.net propose le contenu mais n'a pas vocation à répondre aux demandes d'aides à l'apprentissage. Ce rôle est assuré par les formateurs des ATO/DTO dont il faudra se rapprocher !
- Cahier d’exercices N°1 Document à imprimer. Prévoir un matériel basique (règle, crayon, rapporteur...).
Cartes
Une carte présente des informations en fonction de la position considérée. En aéronautique, ces informations concernent les repères visibles, les angles, les distances, les informations sur l'espace aérien...etc. Il est nécessaire d'appréhender les codes de conception et de lecture des cartes pour une utilisation correcte.
Le type de projection cartographique
La projection cartographique est un ensemble de techniques permettant de représenter une surface non plane (surface de la Terre, d'un autre corps céleste, du ciel, ...) dans son ensemble ou en partie sur la surface plane d'une carte. L'impossibilité de projeter le globe terrestre sur une surface plane sans distorsion explique que diverses projections aient été inventées, chacune ayant ses avantages :
- La projection de Mercator : C'est une projection cylindrique. Les méridiens et les parallèles sont des droites perpandiculaires qui quadrillent le plan. Cette projection conforme conserve les angles (ce qui permet de reporter directement sur la carte les angles mesurés au compas, et vice-versa) mais ne conserve ni les distances, ni les surfaces (l'échelle de la carte variant avec la latitude). Sauf le long de l'équateur. Une ligne droite sur une carte de Mercator ne représente pas la distance la plus courte en réalité. C'est en revanche une ligne d'azimut constant (c'est-à-dire une loxodromie), particulièrement utile pour naviguer à cap constant, même si le trajet ainsi défini n'est généralement pas sur un grand cercle et n'est donc pas le chemin le plus court.
-
Projection cylindrique projection Mercator.
-
Exemple de projection cylindrique avec déformation des distances importante au niveau des pôles.
- La projection conique conforme de Lambert : C'est une projection conique. Les méridiens sont des droites convergentes en un point, les parallèles sont des cercles concentriques autour de ce même point. Elle conserve également les angles. Elle conserve les distances sur le parallèle de référence. Il est donc particulièrement intéressant d'utiliser une projection de Lambert ayant son parallèle de référence sur la zone à exploiter. A proximité du parallèle de référence, une ligne droite sur une projection de Lambert représente la distance la plus courte en réalité (c'est-à-dire une orthodromie).
-
Projection conique type projection de Lambert.
-
Exemple de projection conique.
Les cartes utilisées par le pilote planeur
- La carte permet de représenter les éléments visibles au sol. En France, l'IGN fourni diverses cartes. Ces cartes sont par exemple disponibles en version numérique sur la plateforme Géoportail. L'expérience montre que pour un vol en planeur, une carte avec représentation schématique des éléments facilement identifiables en vol est la plus adaptée.
- La carte permet également de présenter sous forme graphique une partie des informations aéronautiques présentes dans les AIP (Aeronautical Information Publication en anglais) : aérodromes, espaces aériens, fréquences radio, systèmes de radionavigation...etc
Divers organismes proposent des cartes spécifiques à l'usage aéronautique pour différents besoins. En France, c'est principalement le SIA (Service de l'Information Aéronautique) qui éditer les cartes. En partant de la plus grande échelle, les cartes régulièrement utilisées pour le vol en planeur sont :
- La carte du SIA au 1/1 000 000ème : utilisée principalement pour de la radionavigation en route. Elle couvre l'espace du sol au FL195. Disponible en version numérique sur le site web du SIA
- La carte du SIA au 1/500 000ème : utilisée principalement pour de la navigation en route en vol à vue. Elle couvre l'espace du sol au FL115 (ou 3000ft ASFC, le plus élevé des deux). Disponible en version numérique sur Géoportail.
- Les cartes VAC (Visual Approach Chart en anglais) : Il s'agit d'une présentation de l'aérodrome dans son environnement. On y trouve une carte détaillée de l'aérodrome, le sens du tour de piste, ainsi que d'autres indications utiles pour y atterrir en vol à vue. Disponible en version nuémrique sur le site web du SIA
- D'autres types de cartes qui émanent d’initiatives privées ou associative pour répondre à un usage particulier.
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Carte VAC de Chalons Vatry. Source SIA
Les cartes aéronautiques sont réalisées selon un cahier des charges précis définie par l'annexe 4 de l'OACI. Cette annexe est disponible en lecture sur la librairie électronique de l'OACI. Les cartes sont mises à jour régulièrement, tous les 6 ou 12 mois.
La légende de la carte du SIA au 1/500 000ème (version 2021 disponible ici) est disponible sur Géoportail (icône "information de la couche > afficher la légende). Les symboles principaux doivent être connus du pilote de planeur. liste non-exhaustive :
- Aérodrome avec bande en herbe ou piste en dur
- Les chiffres simples sans décimales indiquent des altitudes
- Les chiffres entre parenthèses indiquent des hauteurs
- Les chiffres à trois décimales indiquent des fréquences VHF pour la radiocommunication
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Symboles détaillant les aérodromes
-
Symboles détaillant les villes et rappelant les règles de survol
Exploitation des cartes
De la carte à la réalité : Mesure de la direction et de la distance
- La direction se mesure grâce à un rapporteur. L'objectif est de mesurer l'angle que forme la route avec le méridien le plus proche. Une route à l'Est vaut 90°, au Sud 180°, à l'Ouest 270°. Une prudence particulière doit être prise pour ne pas confondre le sens de la route, ce qui occasionnerait une erreur de 180°.
- La distance se mesure grâce à une règle graduée entre deux points. En considérant que l'erreur d'échelle est négligeable (voir anomalies dû à la projection Lambert conique), il fait multiplier la distance mesurée par l'échelle de la carte afin d'obtenir la distance réelle.
-
Mesure de la direction d'une route entre Brienne et Vatry.
-
Mesure de la distance entre Brienne et Vatry par 2 méthodes. 1) 8.6cm x 500 000 = 43.5km. 2)utiliser un méridien comme règle gradué en y reportant la longueur : 00°24'00" = 24NM = 44.5km. L'écart de 1km est peu important.
De la réalité à la carte : Tracer un relèvement et un éloignement
- Un relèvement est la détermination de l'angle que fait, dans le plan horizontal, la ligne d'un observateur (le pilote) vers un objet avec celle d'une direction de référence fixe (le Nord géographique dans le cas le plus courant). Cette angle est mesuré en vol puis reporté sur la carte.
- Un éloignement est une distance déterminée en vol entre l'aéronef et un point géographique connu. Cette distance est ensuite reportée sur la carte.
Avec au minimum 2 relèvements, ou 1 relèvement et 1 éloignement, il est possible de connaître sa position sur une carte.
-
Tracé de 2 relèvements pour déterminer sa position (ces relèvements peuvent par exemple être transmit par le contrôle aérien de chacun des aérodromes par radiogoniométrie des émissions de l'aéronef).
-
Tracé d'un relèvement et d'un éloignement (provenant par exemple d'une estimation grâce au temps de vol et à la vitesse sol).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation aérienne est l'ensemble des techniques permettant à un pilote d'aéronef de maîtriser ses déplacements. La navigation permet à l'aéronef de suivre une trajectoire appelée route.
La navigation aérienne est largement héritière de la navigation maritime et la terminologie utilisée est identique.
Aux débuts de l'aviation, les navigations se faisaient à vue. En cas de conditions de visibilité dégradées, des phares aéronautiques jalonnaient certains tronçons de routes régulièrement empruntées, comme celle de l'Aéropostale qui amenaient le courrier de la France vers l'Afrique puis l’Amérique du Sud.
Au cours de la seconde moitié du XXe siècle, s’est développée la radionavigation. Au début du XXIe siècle, la navigation aérienne utilise largement le GPS.
Définitions
Le système solaire
Les variations saisonnières de la position du soleil sont créées par l'inclinaison de l'axe de rotation de la Terre par rapport au plan de son orbite autour du Soleil (écliptique). Pour un observateur terrestre, tout au long de l'année, le Soleil, bien que fixe, semble avoir une trajectoire différente dans le ciel. L'été est la saison où la journée dure le plus longtemps et le soleil monte le plus haut dans le ciel.
-
Alternance des saisons sur une année.
-
Mouvement apparent du soleil durant la journée pour un observateur situé dans l'hémisphère nord, en France
Se repérer sur la Terre
Afin de se repérer sur la sphère terrestre, la sphère est quadrillée par :
- Des Parallèles. Lorsqu'on se déplace vers le Nord ou le Sud (en restant sur le même méridien), on change de parallèle. Les Parallèles sont numérotés en degrés (0° étant l'équateur) plus une indication Nord ou Sud. le pôle Nord est numéroté 90°N. Paris se situe au niveau du parallèle 48,8°N. Il s'agit de la coordonnée de Latitude
- Des Méridiens. Lorsqu'on se déplace vers l'Ouest ou l'Est (en restant sur le même parallèle), on change de méridien. Les méridiens sont numérotés en degrés (0° étant le méridien passant par l'observatoire royal de Greenwich) plus une indication Ouest ou Est. Paris se situe au niveau du méridien 2,3°E. Il s'agit de la coordonnée de Longitude
-
Principaux parallèles, permettant de mesurer la Latitude et Principaux méridiens, permettant de mesurer la Longitude
Les coordonnées peuvent être exprimées de deux manières :
- Expression en degrés et décimale : La tour Eiffel à Paris se situe exactement aux coordonnées 48.8582N, 2.2945E
- Expression en degrés, minutes et secondes : parfois noté « DMS ». Chaque degré est divisé en 60minutes (1°=60'), puis chaque minute et divisé en 60secondes (1'=60"). La tour Eiffel se situe exactement aux coordonnées 48°51'29"N, 2°17'40"E
Les parallèles et les méridiens sont des arcs de cercles. Il est possible de les classer en 2 catégories :
- Ceux qui sont dit Grand cercles : l'arc de cercle à pour centre le centre de la terre, sont rayon est toujours égal à celui de la terre. Tous les méridiens sont des grand cercles. L'équateur est aussi un grand cercle.
- Ceux qui sont dit Petit cercles : tous les autres cercles n'ayant pas pour centre le centre de la terre. Mis a part l'équateur, tous les parallèles sont des petits cercles.
L'intérêt de cette classification est l'exploitation des Grands Cercles : leur périmètre est toujours égal au périmètre de la terre, c'est à dire environ 40 000km. Par exemple, tout déplacement de 0°01'00" en coordonnés le long d'un grand cercle fera toujours la même distance :
la longueur d'une minute d'arc (0°01'00") au niveau d'un grand cercle est la définition d'un Mille marin (nautique miles en anglais, noté NM). Cette astucieuse définition permet de calculer rapidement la distance qui sépare deux coordonnées. En ignorant les secondes d'arc, la distance entre la tour Eiffel (48°51'N, 2°17'E) et la tour de Pize (43°43'N, 10°23'E) est 05°08' sur l'axe Nord/Sud (soit 308NM).
Le temps
Le temps est une notion indispensable en navigation. Les divisions qui permettent de mesurer le temps sont faciles à appréhender et universelles : l'année, le jour, l'heure, la minute...etc. Le point de référence est beaucoup plus délicat car il en existe un certain nombre :
- LMT, Local Mean Time en anglais. C'est l'heure qui a pour référence le soleil. Lorsque le soleil est au zénith, la montre est réglée à 12h00. Cette référence dépend donc de la position géographique. Chaque endroit possède son heure LMT. Ce système est peu pratique et n'est quasiment plus utilisé aujourd'hui.
- Heures légales. Il s'agit d'une heure de référence pour un large territoire afin de résoudre les problèmes posés par l'heure LMT. Ce sont notamment les fuseaux horaires : la terre est décomposé en 24 fuseaux de 60minutes chacun qui possèdent tous leur propre heure légale de référence.
- UTC, Universal Time Coordinated en anglais. C'est une heure de référence mondiale, qui a pour référence le méridien d'origine 0°(Greenwich). A 12h UTC, le soleil est au zénith à Greenwich, mais il fait nuit dans l'Océan Pacifique. Les dénominations heure GMT] ou heure TU peuvent être considérées identique à l'heure UTC. Cette explication est en fait approximative mais suffisante pour le pilote planeur.
En aéronautique, les heures sont souvent définies en heure UTC car il est plus facile d’œuvrer avec une seule référence quelque soit le lieu ou le moment. Pour que le pilote puisse utiliser sa montre réglée en heure locale, il faudra ajouté l'écart entre l'heure UTC et son heure légale. En France, le décalage par rapport à l'heure UTC est : UTC+1 en hiver et UTC+2 en été.
La ligne de changement de date est une ligne imaginaire, à la surface de la Terre, approximativement située au 180e méridien (est et ouest) dans l'océan Pacifique ; son rôle est d'indiquer l'endroit où il est nécessaire de changer de date quand on la traverse. Les pilotes planeur européen sont peu concerné par cette notion.
Afin de définir les heures auxquelles la luminosité est suffisante pour entreprendre un vol VFR de jour, il est nécessaire de définir :
- le lever du soleil, SunRise en anglais (SR) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le matin.
- Le coucher du soleil, SunSet en anglais (SS) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le soir.
- le crépuscule civil : C'est la période où le centre du Soleil est situé à moins de 6° sous la ligne d'horizon.
La journée aéronautique durant laquelle le vol VFR de jour est possible commence au début du crépuscule avant le lever du soleil et se termine à la fin du crépuscule après le coucher du soleil. Aux latitudes moyennes (30 à 60°) cette définition est souvent simplifié, la journée aéronautique commence à SR-30min et se termine à SS+30min
Les directions
Afin de donner une direction, les points cardinaux sont utilisés. Pour un degré de précision plus important dans l'expression d'une direction, un angle est exprimé en prenant le Nord comme référence.
-
Rose des vents, indiquant les points cardinaux.
-
Rapporteur permettant d'exprimer une direction par un angle.
Les Distances
Les distances horizontales sont exprimées en Mille marin ou en kilomètres.
- Pour convertir rapidement des Nautiques Miles en kilomètres par calcul mental, une bonne approximation (erreur de 3%) est : prendre le double (x2), et retirer 1/10e.
Les distances verticales sont exprimées en Pied ou en Mètre.
- Pour convertir rapidement des Pieds en Mètres par calcul mental, une bonne approximation (erreur de 1.5%) est : multiplier par dix (x10), diviser par trois (/3).
- Pour convertir rapidement des Mètres en Pieds par calcul mental, une bonne approximation (erreur de 1.5%) est : diviser par dix (/10), multiplier par trois (x3).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Magnétisme et compas
Le compas est un instrument de bord permettant de mesurer la direction en utilisant le champ magnétique terrestre. Son fonctionnement est similaire à celui d'une boussole. C'est un instrument simple, mais les limitations de la mesure grâce au champ magnétique sont multiples :
- Le champ magnétique terrestre n'est pas aligné avec l'axe de rotation de la terre. Le compas indique les directions par rapport à la direction du pôle Nord magnétique, qui n'est pas au même endroit que le pôle Nord géographique. On dit que la différence entre les deux directions magnétiques et géographiques est la déclinaison magnétique.
-
Déclinaison magnétique. Le compas indique le pôle Nord magnétique.
- Le Nord magnétique bouge notablement en 6 à 12mois. La déclinaison doit être mise à jour régulièrement. Des cartes spécifiques présentent la déclinaison en fonction de chaque position sur terre. Les lignes qui joignent les endroits d'égale déclinaison sont appelées lignes isogones. En France et à notre époque, par chance, la déclinaison est négligeable (proche de 0°).
-
Évolution de la déclinaison entre 1590 et 1990 en fonction de la position sur la Terre, par représentation des lignes isogones. Cliquer pour voir l'animation.
-
Lignes d'égale déclinaisons magnétiques (les isogones) en France en 2020 (en orange clair). Service de l’Information Aéronautique - Données originales téléchargées sur https://www.sia.aviation-civile.gouv.fr, mise à jour du 26 mars 2020.
- Le compas est instrument imparfait. Il n'indique pas parfaitement le Nord magnétique. Ceci est dû au compas lui-même mais aussi à l'installation dans l'aéronef. On dit que cette erreur est la déviation. Cette erreur dépend de la direction qu'il indique. Une table de correction est disponible à proximité immédiate du compas.
-
Courbe de déviation en fonction des directions mesurées pour un compas maritime.
-
Le cap compas indiqué est de 45°. La déviation indiquée par la table (en rouge) est entre -2° et -5°. Le cap magnétique est donc de l'ordre de 42°.
Afin d'obtenir la vrai direction, les erreurs de déclinaison et déviation doivent être retirées par calcul :
-
Correction de la déviation et de la déclinaison après lecture du cap compas. Dans l'autre sens, procéder aux correction en inversant le signe.
Le compas mesure la direction du champ magnétique là où il se trouve. Tout éléments qui génère un champ magnétique peut l'influencer, il en résultera une indication de direction très erronée. Le pilote doit prendre les précautions nécessaires pour garantir la bonne indication du compas :
- un aimant placé à proximité d'un compas : des aimants sont présents dans les casques utilisé dans les aéronefs, les téléphones...
- les systèmes électriques de l'aéronef génèrent divers champs magnétiques dû à la circulation du courant électriques dans les câbles. Le fonctionnement de certaines servitudes électriques peut donc influencer le compas.
- les masses métalliques ferromagnétiques, même sans être des aimants, posent problèmes. Un stylo qui possède un corps métallique à proximité immédiate d'un compas rend son indication fausse.
Enfin, le compas indique une valeur correcte en ligne droite en l'absence de turbulence importante. Il ne faut pas prendre en compte l'indication d'un compas :
- lors d'un virage;
- lors de turbulences importantes.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Cartes
Une carte présente des informations en fonction de la position considérée. En aéronautique, ces informations concernent les repères visibles, les angles, les distances, les informations sur l'espace aérien...etc. Il est nécessaire d'appréhender les codes de conception et de lecture des cartes pour une utilisation correcte.
Le type de projection cartographique
La projection cartographique est un ensemble de techniques permettant de représenter une surface non plane (surface de la Terre, d'un autre corps céleste, du ciel, ...) dans son ensemble ou en partie sur la surface plane d'une carte. L'impossibilité de projeter le globe terrestre sur une surface plane sans distorsion explique que diverses projections aient été inventées, chacune ayant ses avantages :
- La projection de Mercator : C'est une projection cylindrique. Les méridiens et les parallèles sont des droites perpandiculaires qui quadrillent le plan. Cette projection conforme conserve les angles (ce qui permet de reporter directement sur la carte les angles mesurés au compas, et vice-versa) mais ne conserve ni les distances, ni les surfaces (l'échelle de la carte variant avec la latitude). Sauf le long de l'équateur. Une ligne droite sur une carte de Mercator ne représente pas la distance la plus courte en réalité. C'est en revanche une ligne d'azimut constant (c'est-à-dire une loxodromie), particulièrement utile pour naviguer à cap constant, même si le trajet ainsi défini n'est généralement pas sur un grand cercle et n'est donc pas le chemin le plus court.
-
Projection cylindrique projection Mercator.
-
Exemple de projection cylindrique avec déformation des distances importante au niveau des pôles.
- La projection conique conforme de Lambert : C'est une projection conique. Les méridiens sont des droites convergentes en un point, les parallèles sont des cercles concentriques autour de ce même point. Elle conserve également les angles. Elle conserve les distances sur le parallèle de référence. Il est donc particulièrement intéressant d'utiliser une projection de Lambert ayant son parallèle de référence sur la zone à exploiter. A proximité du parallèle de référence, une ligne droite sur une projection de Lambert représente la distance la plus courte en réalité (c'est-à-dire une orthodromie).
-
Projection conique type projection de Lambert.
-
Exemple de projection conique.
Les cartes utilisées par le pilote planeur
- La carte permet de représenter les éléments visibles au sol. En France, l'IGN fourni diverses cartes. Ces cartes sont par exemple disponibles en version numérique sur la plateforme Géoportail. L'expérience montre que pour un vol en planeur, une carte avec représentation schématique des éléments facilement identifiables en vol est la plus adaptée.
- La carte permet également de présenter sous forme graphique une partie des informations aéronautiques présentes dans les AIP (Aeronautical Information Publication en anglais) : aérodromes, espaces aériens, fréquences radio, systèmes de radionavigation...etc
Divers organismes proposent des cartes spécifiques à l'usage aéronautique pour différents besoins. En France, c'est principalement le SIA (Service de l'Information Aéronautique) qui éditer les cartes. En partant de la plus grande échelle, les cartes régulièrement utilisées pour le vol en planeur sont :
- La carte du SIA au 1/1 000 000ème : utilisée principalement pour de la radionavigation en route. Elle couvre l'espace du sol au FL195. Disponible en version numérique sur le site web du SIA
- La carte du SIA au 1/500 000ème : utilisée principalement pour de la navigation en route en vol à vue. Elle couvre l'espace du sol au FL115 (ou 3000ft ASFC, le plus élevé des deux). Disponible en version numérique sur Géoportail.
- Les cartes VAC (Visual Approach Chart en anglais) : Il s'agit d'une présentation de l'aérodrome dans son environnement. On y trouve une carte détaillée de l'aérodrome, le sens du tour de piste, ainsi que d'autres indications utiles pour y atterrir en vol à vue. Disponible en version nuémrique sur le site web du SIA
- D'autres types de cartes qui émanent d’initiatives privées ou associative pour répondre à un usage particulier.
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Carte VAC de Chalons Vatry. Source SIA
Les cartes aéronautiques sont réalisées selon un cahier des charges précis définie par l'annexe 4 de l'OACI. Cette annexe est disponible en lecture sur la librairie électronique de l'OACI. Les cartes sont mises à jour régulièrement, tous les 6 ou 12 mois.
La légende de la carte du SIA au 1/500 000ème (version 2021 disponible ici) est disponible sur Géoportail (icône "information de la couche > afficher la légende). Les symboles principaux doivent être connus du pilote de planeur. liste non-exhaustive :
- Aérodrome avec bande en herbe ou piste en dur
- Les chiffres simples sans décimales indiquent des altitudes
- Les chiffres entre parenthèses indiquent des hauteurs
- Les chiffres à trois décimales indiquent des fréquences VHF pour la radiocommunication
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Symboles détaillant les aérodromes
-
Symboles détaillant les villes et rappelant les règles de survol
Exploitation des cartes
De la carte à la réalité : Mesure de la direction et de la distance
- La direction se mesure grâce à un rapporteur. L'objectif est de mesurer l'angle que forme la route avec le méridien le plus proche. Une route à l'Est vaut 90°, au Sud 180°, à l'Ouest 270°. Une prudence particulière doit être prise pour ne pas confondre le sens de la route, ce qui occasionnerait une erreur de 180°.
- La distance se mesure grâce à une règle graduée entre deux points. En considérant que l'erreur d'échelle est négligeable (voir anomalies dû à la projection Lambert conique), il fait multiplier la distance mesurée par l'échelle de la carte afin d'obtenir la distance réelle.
-
Mesure de la direction d'une route entre Brienne et Vatry.
-
Mesure de la distance entre Brienne et Vatry par 2 méthodes. 1) 8.6cm x 500 000 = 43.5km. 2)utiliser un méridien comme règle gradué en y reportant la longueur : 00°24'00" = 24NM = 44.5km. L'écart de 1km est peu important.
De la réalité à la carte : Tracer un relèvement et un éloignement
- Un relèvement est la détermination de l'angle que fait, dans le plan horizontal, la ligne d'un observateur (le pilote) vers un objet avec celle d'une direction de référence fixe (le Nord géographique dans le cas le plus courant). Cette angle est mesuré en vol puis reporté sur la carte.
- Un éloignement est une distance déterminée en vol entre l'aéronef et un point géographique connu. Cette distance est ensuite reportée sur la carte.
Avec au minimum 2 relèvements, ou 1 relèvement et 1 éloignement, il est possible de connaître sa position sur une carte.
-
Tracé de 2 relèvements pour déterminer sa position (ces relèvements peuvent par exemple être transmit par le contrôle aérien de chacun des aérodromes par radiogoniométrie des émissions de l'aéronef).
-
Tracé d'un relèvement et d'un éloignement (provenant par exemple d'une estimation grâce au temps de vol et à la vitesse sol).
Modèle en boucle détecté : 9-4 Techniques de Navigation à vue (motoplaneurs) Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Durant le vol, le pilote navigue facilement grâce à la préparation menée au sol. Toutefois, il sera nécessaire d'évaluer et d'ajuster un certain nombre de paramètres, en croisière le pilote utilise des repères connus pour actualiser les éléments de navigation :
- Actualisation de la vitesse sol : Durant une ligne droite, il va être possible de déterminer sa vitesse sol réelle en fonction de la distance parcourue entre deux repères et le temps passé (chronomètre). Il est possible de corriger la vitesse sol estimée au départ.
- Actualisation de la vitesse et de la direction du vent : Grâce à la connaissance de la vitesse sol et de la dérive constatée en vol, le pilote peut en déduire la vitesse et la direction du vent (triangle des vitesse). Cet élément permet d'actualiser les corrections à apporter sur le prochain segment de navigation.
- Corrections de trajectoires : Si la route suivi n'est finalement pas la route escomptée, le pilote appliquera des corrections de trajectoire. Ces corrections permettent de revenir sur la route et sont plus ou moins forte suivant la nécessité de corriger l'écart rapidement (relief, espaces aériens, nécessité de se rapprocher d'un repère pour éviter l'égarement...)
- Révisions des ETA : L’ensemble des paramètres révisés permettent de conclure à une modification des ETA.
Pour la navigation à vue, et particulièrement la navigation à l'estime, le Journal de navigation ou Log de navigation est une technique de préparation des informations (au sol) et d'actualisation (en vol). Il s'agit d'un petit tableau regroupant les informations de navigation par ordre chronologique (points tournant, route magnétique, distance, carburant, ETA...etc). Bien que le format de base soit commun, chaque pilote peut y ajouter des informations qu'il souhaite retrouver facilement durant le vol. Ce document est créé lors de la préparation du vol et il est emmené en vol au même titre qu'une carte. Durant le vol, le pilote corrigera les informations en fonction de l'actualisation des paramètres.
-
Exemple de log de navigation complété.
-
Tracé exemple d'une navigation LFMX - Vinon - Gap sur une carte aéronautique au 1/500 000
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Utilisation du Service d'Information de Vol
Le Service d'Information de Vol, souvent appelé SIV (traduit de Flight Information Service ou FIS en anglais) est un service apporté à tout aéronef évoluant dans une Région d'information de vol (traduit de Flight Information Region ou FIR en anglais). Une FIR s'étant du sol au FL195. A l'intérieur d'une FIR, le Service d'Information de Vol peut être rendu par différentes entités, suivant l'endroit où l'aéronef évolue :
- Lorsque l'aéronef évolue dans un espace aérien contrôlé (classe d'espace E, D, C, B, A), il est rendu par les services du contrôle.
- Lorsque l'aéronef évolue en classe d'espace G, il est rendu par un centre de service de la circulation aérienne proche.
Pour l'aviation générale en France, le Service d'Information de Vol est disponible durant tout le vol. Dans le cadre du Service d'Information de Vol, l'organisme (contacté par radio) peut transmettre des renseignements (règlementation SERA, article SERA.9005):
- sur la disponibilité des services de radionavigation;
- sur les modifications de l’état des aérodromes et des installations et services connexes, y compris des renseignements sur l’état des aires de mouvement lorsque leurs caractéristiques sont modifiées par la présence de neige, de glace ou d’une épaisseur significative d’eau;
- sur les conditions météorologiques observées ou prévues aux aérodromes de départ, de destination et de dégagement;
- sur les risques de collision;
- sur les renseignements disponibles sur la circulation et les conditions météorologiques le long de la route lorsque ces conditions sont susceptibles de rendre impossible la poursuite du vol selon les règles de vol à vue ;
- sur tout autre renseignement susceptible d’avoir une incidence sur la sécurité.
- Cette liste est réduite aux informations utiles au vol en planeur.
Dès que besoin, le pilote peut bénéficier du SIV en contactant le service adéquat par radio. C'est un service gratuit, permettant d'augmenter le niveau de sécurité.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Bases de la propagation des ondes radioélectrique
Aujourd'hui, beaucoup de systèmes fonctionnent avec des ondes radioélectriques comme le téléphone sans fil ou la télévision. En aéronautique, la possibilité de transmettre des informations grâce à des ondes radioélectriques est très utile comme par exemple pour communiquer oralement, donner des informations de direction, ou encore des informations de position...etc.
Afin d'exploiter correctement ces systèmes, et surtout d'en connaître les limitations respectives, il est nécessaire d'aborder brièvement leur fonctionnement.
Caractéristiques des Antennes : Les ondes électromagnétiques sont émises par des antennes. La forme et la taille de l'antenne peut être très différent suivant :
- La fréquence de l'onde électromagnétique utilisée : Pour un même type d'antenne, plus la fréquence est élevée et plus l'antenne est petite.
- La directivité de l'antenne : Une antenne peut émettre dans toutes les directions (utile en communication radio), ou alors seulement dans une direction particulière (utile pour un radar). Toutes les antennes connaissent des "angles morts" où elles n'émettent (ou ne reçoivent) pas du tout.
- La puissance de l'onde à émettre : Une antenne de forte puissance ou prévue pour capter de très faibles signaux est généralement plus grande.
-
Antenne pour la communication VHF (118 à 137 MHz)
AJOUTER PHOTO ANTENNE Flarm, Antenne GPS, Antenne transpondeur, Antenne VOR, antenne VDF
La Propagation des ondes : Suivant la fréquence de l'onde utilisée, la propagation des ondes radio est différente. Les concepteurs des systèmes aéronautiques choisissent la fréquence la plus adaptée au besoin du système. Les 3 types de propagation sont :
- les ondes de sol (0.03 à 0.3 MHz) : C'est lorsque l'onde se propage en suivant la courbure de la terre. Utile pour établir des communication mondiales, mais la puissance nécessaire est très importante.
- les ondes de ciel (1 à 30MHz) : C'est lorsque l'onde est capable d'être réfléchie par une couche de l'atmosphère (la ionosphère) et sur le sol, permettant par exemple d'établir des communications entre deux vallées encaissées et des communications mondiales avec plusieurs rebonds.
- les ondes directes (30MHz et plus) : C'est lorsque l'onde se propage en ligne droite, et sont arrêtées par les obstacles. C'est la portée optique. Pour établir une transmission entre un émetteur et un récepteur, il faut que ces derniers puisse se voir. Les montagnes peuvent empêcher la propagation (les bâtiments dans une moindre mesure), mais c'est surtout le fait que la terre soit ronde qui limite la portée optique. Dans le cas du franchissement de l’horizon, plus l'émetteur et le récepteur sont haut, et plus la portée optique est grande. Il est possible de calculer la portée optique avec l'altitude de l'aéronef (h) en mètre : . Il faut noter que cette formule ne prend en compte que les contraintes géométriques de la Terre. En tenant compte de l'atmosphère terrestre, la portée est légèrement plus grande.
-
La propagation par onde de sol sur la surface de la Terre.
-
La propagation par onde de ciel réfléchie entre ciel et terre.
-
La propagation par onde directe (portée optique).
La puissance de l'onde : La puissance émise par une antenne se propage et se répartie dans plusieurs directions. Au fur et à mesure que l'onde s'éloigne de son antenne, sa puissance émise se dilue sur une zone de plus en plus grande. Il est possible que pour un récepteur très éloigné, la puissance soit trop diluée (trop faible) et qu'aucun signal ne soit détecté. La portée est donc limitée par la puissance émise et par la sensibilité du récepteur. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Radiogoniométrie au sol Le principe est de déterminer la direction d'une émission radioélectrique. Au sol, ce principe est utilisé par les services de la Circulation Aérienne pour déterminer d'où provient l'onde radioélectrique de l'aéronef qui est en train de parler. Pour eux, c'est une aide importante pour comprendre la situation rapidement. Pour le pilote planeur, l'information de QDR (Relèvement magnétique en code Q) peut être obtenue sur simple demande par radio :
- Avec le QDR provenant de deux organismes de contrôles différents et une carte, il est possible d'obtenir sa position.
- Avec le QDR provenant d'un contrôleur d'aérodrome, il est possible de calculer une route pour prendre la direction de l'aérodrome (QDM en code Q). Le QDM est l’inverse du QDR (QDM = QDR +/-180°).
En France, tous les organismes de contrôle aérien disposent normalement d'un Radiogoniomètre. Dès qu'une communication radio est établie (portée optique), il est possible d'obtenir un QDR ou un QDM. Voici un exemple de demande à faire par radio :
- "Orléans info du motoplaneur F-CCUY, je suis égaré, pouvez vous me donner un QDR par rapport à l'aérodrome d'Orléans?"
- "F-CCUY de Orléans info, vous êtes dans le relèvement magnétique 145°"
- "Orléans info du F-CCUY, 145°, je vous remercie"
La précision des systèmes de radiogoniométrie moderne est bonne.
NDB/ADF (Radiocompas)
Le radiocompas est un système basé sur la radiogoniométrie. Des balises au sol placées aux points clefs des trajectoires des aéronefs émettent en permanence sur une fréquence comprise entre 190 et 1 750 kHz (en France, principalement entre 280 et 450 kHz). A bord de l'aéronef, un système de radiogoniométrie permet de mesurer l'angle entre la balise et l'axe longitudinal de l'aéronef.
- NDB : Non Directional Beacon en anglais, Balise Non Directionnelle en français. Il s'agit du nom de la balise au sol.
- ADF : Automatic Directional Finder en anglais, Radiocompas en français. Il s'agit du nom de l'instrument implanté à bord de l'aéronef.
La fréquence utilisée permet la propagation en onde de sol. La portée n'est donc pas limité par l'horizon. Seule la puissance émettrice de la balise limite la portée.
Limitations du système ADF : le signal est affecté par les conditions atmosphériques, les terrains montagneux, la réfraction côtière et les orages, notamment sur les longues distances.
Utilisation :
- Le pilote souhaite exploitée une balise indiquée par sa carte;
- Il entre la fréquence de la balise sur son radiocompas;
- Pour vérifier que la bonne balise est sélectionnée, il écoute le message en morse qu'émet la balise toute les 15 secondes (3 lettres indiquées sur la carte);
- Le radiocompas pointe en direction de la balise.
-
Antenne NDB "NKR" à Leimen-Ochsenbach, Allemagne
-
Le symbole du NDB sur une carte. la fréquence de la balise est 428KHz, CTX est son identifiant émit en morse
-
radiocompas
VOR
Un système VOR (VHF Omnidirectional Range en anglais) permet de déterminer un relèvement magnétique par rapport à une station au sol (balise émetteur VOR dont la position est connue), et donc le radial sur lequel l'aéronef est situé. Par déduction, il permet de suivre n'importe quelle route passant par la station (en rapprochement ou en éloignement de celle-ci), ou même de déterminer la position exacte de l'avion en utilisant deux balises VOR (intersection de radiaux) ou un DME (intersection d'un radial et d'un arc DME).
La station au sol utilise la gamme de fréquences VHF de 108 à 117,95 MHz (donc une portée optique). Plus intéressant que le radiocompas, le VOR est moins soumis aux perturbations extérieures, telles celle de l'ionosphère ou simplement les nuages.
L'indicateur à bord qui permet de lire les indications du VOR se nome OBI (Omnidirectional Bearing Indicator en anglais). Il est composé de plusieurs indicateurs :
- le FLAG qui permet de savoir si on reçoit ou non le signal de la station VOR
- un bouton OBS (Omnidirectional Bearing Selector) pour choisir le radial auquel on souhaite se comparer
- une aiguille de déviation qui indique le résultat de la comparaison : si on se trouve à droite, à gauche ou sur le radial choisi
- derrière l'aiguille, une échelle indique l'amplitude de l'écart. Chaque point représente un écart de 2° soit une indication de 10° max de chaque côté
- un indicateur TO / FROM qui permet de savoir si on est en situation de rapprochement ou d’éloignement de la station sol
Utilisation :
- Le pilote souhaite exploitée une balise VOR indiquée par sa carte;
- Il entre la fréquence de la balise sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise (3 lettres indiquées sur la carte);
- Si le pilote souhaite intercepter un radial donné, il choisi le radial souhaité avec le bouton OBS et l'intercepte lorsque l'aiguille de déviation n'indique plus d'écart
- Si le pilote souhaite connaître le radial sur lequel il se trouve, il tourne le bouton OBS jusqu'a ce que l'aiguille de déviation n'indique plus déviation. L'indicateut TO/FROM lui permet de lever le doute entre QDR et QDM.
-
Vue aérienne d'un ensemble d'antenne d'une balise VOR de Sprimont "SPI" en Belgique
-
Le symbole du VOR sur une carte. la fréquence de la balise est 110.2MHz, DVL est son identifiant émit en morse
-
Omnidirectional Bearing Indicator. L'aiguille de déviation est au centre (5 graduations de chaque côté). L'indicateur TO/FROM indique FROM. Le radial sélectionné est le 252°.
DME
Un système DME (Distance Measuring Equipment en anglais) permet de connaître la distance oblique qui sépare un aéronef d'une station au sol en mesurant le temps que met une impulsion radioélectrique pour faire un aller-retour.
- Une station sol DME est typiquement implantée avec un VOR. On parle alors de station sol VOR/DME.
- Le DME est fonctionnellement identique au composant distance du TACAN, c'est dire qu'un utilisateur de DME peut exploiter les stations sol TACAN.
- Une station sol DME basse puissance peut être implantée avec un ILS pour mesurer la distance par rapport au seuil de piste lors d'une finale sans visibilité.
La station au sol utilise la gamme de fréquences UHF de 962 à 1 213 MHz (donc une portée optique) qui sont appariées à celles des VOR et des ILS : c'est à dire que la fréquence du DME est automatiquement sélectionnée lorsque le pilote renseigne la fréquence du VOR ou le l'ILS. A noter que c'est la distance oblique qui est mesurée, donc si l'aéronef passe à la verticale de la station sol, le DME indiquera la hauteur de l'aéronef.
l'OACI préconise une précision minimum de ±(0,25 milles nautiques + 1,25 % de la distance). Une station sol peut gérer environ 100 aéronefs. Au delà, elle ignore les aéronefs les plus loin.
Utilisation :
- Le pilote souhaite exploitée une balise VOR/DME indiquée par sa carte;
- Il entre la fréquence de la balise VOR sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise un peu plus aigüe que le code du VOR (3 lettres indiquées sur la carte);
- La distance oblique s'affiche à l'écran quelques secondes plus tard.
- Si l'aéronef est très éloigné par rapport à une station sol, il sera dans les premiers à perdre l'information si la balise devient saturée.
-
Vue d'antenne DME seule.
-
Le symbole du VOR/DME sur une carte. la fréquence du VOR 116.7MHz doit être sélectionnée pour utiliser le DME appariée, MOU est son identifiant émit en morse
-
Afficheur DME. En exploitant la variation de la distance en fonction du temps, il peut indiquer une vitesse sol radiale, et le temps restant pour atteindre la balise.
Les Radars
Radar primaire au sol
Le radar (acronyme issu de l'anglais RAdio Detection And Ranging) est un système qui utilise les ondes électromagnétiques pour détecter la présence et déterminer la position des aéronefs. Les ondes envoyées par l'émetteur sont réfléchies par la cible, et les signaux de retour (appelés écho-radar) sont captés et analysés par le récepteur. La distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne. L'altitude ne peut pas être mesurée, bien que les systèmes modernes et plus élaborés parviennent à donner une indication d'altitude.
Ce principe de Radar ne nécessite aucun instrument à bord de l'aéronef et est appelé Radar primaire. La fréquence utilisée est choisie pour être réfléchies par les aéronefs sans être (trop) perturbée par les phénomènes météo. La portée est la portée optique. Les puissances émises sont très importantes car l'onde doit faire le voyage aller, être partiellement réfléchie par l'aéronef, et faire le voyage retour.
Généralement, le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), et proche de lui (impossibilité de recevoir le signal tant que l'antenne émet). Comme le système est à portée optique, un aéronef en basse altitude masqué par un relief n'est pas visible. Ce type de radar n'est pas forcement disponible par tous les centres de contrôles.
Utilisation :
- le radar balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les échos-radar s'affichent sur l'écran du contrôleur aérien, mais le système ne donne aucune information sur ces plots radar.
- classiquement, le radar primaire ne permet pas de connaître l'altitude de l'aéronef
-
Principe du radar primaire.
-
Antenne du radar primaire, dans un couple radar primaire + radar secondaire.
-
Type d'écran de radar primaire non filtré avec tous les échos-radar parasites.
Radar de surveillance secondaire
Le radar secondaire (ou SSR pour Secondary Surveillance RADAR en anglais), est un dispositif radar de contrôle aérien qui « interroge » les aéronefs équipés d'un transpondeurs qui sont à sa portée. Les transpondeurs interrogés répondent au radar en envoyant le code à 4 chiffre entré par le pilote (ce code est communiqué par le contrôle aérien par radio). Les réponses des avions sont captées et analysées par le récepteur. Comme pour le radar primaire, la distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne, et l'altitude ne peut pas être mesurée. L’intérêt du radar secondaire est que chaque plot radar est identifié par le code à 4 chiffres permettant au contrôle aérien d'identifier sans ambiguïté qui est qui.
Pour être visible du contrôle aérien, il est impératif d'avoir un transpondeur en fonctionnement à bord de l'aéronef. La fréquence utilisée est de 1030MHz (interrogations radar sol) et 1090MHz (réponse du transpondeur). La portée est la portée optique (donc un aéronef en basse altitude masqué par un relief n'est pas visible). Les puissances émises sont moins importantes qu'un radar primaire car l'onde ne doit faire que le voyage aller. Le voyage retour est fait l'onde émise par le transpondeur.
Le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), ou proche de lui (technologie de Suppression des Lobes Secondaires) mais la zone est généralement couverte par une antenne voisine. Il a été constaté qu'un planeur en spirale peut temporairement disparaitre des écrans radar.
Les technologies de radar secondaire ont évolué au fil du temps :
- Le mode A : Le mode le plus basique. Le transpondeur répond avec le code SSR composé de 4 chiffres de 0 à 7.
- Le mode C : Le transpondeur répond avec le code SSR + l'altitude pression à laquelle se trouve l'aéronef. Sur l'écran du contrôleur, le plot radar apparait avec le code et l'altitude, permettant une gestion fine de la circulation aérienne.
- Le mode S : Le transpondeur répond avec le code SSR + l'altitude + l'immatriculation + d'autres informations...Sur l'écran du contrôleur, le plot radar apparait avec l'immatriculation et l'altitude. Ce mode permet au contrôleur une meilleure réactivité et de donner le même code SSR à plusieurs aéronefs.
En France en 2020, le radar secondaire mode S est disponible dans une majorité de centres de contrôles.
Lors d'un vol sans service ATS, le pilote peut mettre un code de sa propre initiative afin de transmettre un message particulier :
| Liste des codes SSR à connaître | |
|---|---|
| Code | Signification |
| 7000 | Code à utiliser France en l'absence de d'ATS, pour transmettre sa position et améliorer la sécurité. Obligatoire, sauf pour les aéronefs à autonomie électrique limitée (planeurs pur, ballons...) |
| 7500 | Code pour signifier une intervention illicite (détournement...) |
| 7600 | Code pour signifier une panne des moyens de communication radio |
| 7700 | Code pour signifier une situation d'urgence ou d'interception |
Aussi, le système TCAS (implanté généralement à bord des aéronefs de tailles moyennes) interrogent les transpondeurs de tous les autres aéronefs dans un rayon de quelques dizaines de kilomètres. La position des autres aéronefs est connu, permettant de prévenir les collisions.
- le pilote affiche le code 7000, ou un code donné par l'ATS par radio.
- le radar secondaire balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les réponses des transpondeurs s'affichent sur l'écran du contrôleur aérien. En fonction du Mode (A, C ou S), plus ou moins d'informations apparaissent à côté du plot radar.
- Le contrôleur peut demander à un pilote de mettre Transpondeur IDENT. Le pilote doit appuyer sur le bouton IDENT.
- Le plot radar apparait alors en surbrillance pendant quelques minutes, pour aider l'identification par le contrôleur.
-
Antenne du radar secondaire, dans un couple radar primaire + radar secondaire.
-
transpondeur à bord. Code actif 7000 (en haut), mode A + C + S. Noter le bouton Ident en haut à droite.
-
Type d'écran de radar secondaire. Aéronef 1 : mode C, Alt. 700ft, 70kt. Aéronef 2 : mode S, alt. 2600ft, 70kt. Aéronef 3 : mode S, alt. 200ft, 100kt.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation par satellite est une technique de navigation basé sur système de positionnement par satellites.
Un système de positionnement par satellites (ou GNSS pour Global Navigation Satellite System en anglais) est un ensemble de composants reposant sur une constellation de satellites artificiels permettant de déterminer sa position 3D, sa vitesse 3D et l'heure grâce à un récepteur portable de petite taille. Cette catégorie de système de géopositionnement a pour avantage une précision de l'ordre de 5 à 15 mètres, une couverture quasi-mondiale. A l’inverse, le type d'onde utilisée rend le système sensible aux obstacles présents entre le terminal récepteur et les satellites (immeubles, montagnes...).
En plus de cet ensemble, certains systèmes d'augmentation et de fiabilisation permettent de fiabiliser le système et d'améliorer les performances à une précision de quelques mètres (DGPS, EGNOS, Assisted GPS...).
Mise en œuvre
Le système GPS (le système développé par les États-Unis) repose sur une constellation d'une trentaine de satellites qui permet à un utilisateur, situé sur n'importe quel point du globe, d'avoir toujours au minimum quatre satellites à portée (dans l'hypothèse d'un environnement dégagé d'obstacles dit « clear sky »). Le terminal de l'utilisateur calcule sa position grâce au signal émis par chacun des satellites. À ce stade, la communication est mono-directionnelle, c'est-à-dire que le terminal de l'utilisateur ne fait que recevoir les signaux.
| Informations disponibles sur le récepteur en fonction du nombre de satellites en vue | |
|---|---|
| 2 satellites | Date et heure |
| 3 satellites | Date et heure + position horizontale (latitude et longitude) |
| 4 satellites et + | Date et heure + position horizontale + position verticale (altitude) |
Avantages
- Le système GNSS permet de se positionner très rapidement directement sur une carte.
- De nombreuses fonctions des récepteurs permettent aussi de programmer la route suivie: dans la navigation aérienne sous forme de points tournants pour faciliter le travail du pilote.
- En planeur, le récepteur peut calculer des plans de finesses pour rejoindre les aérodromes proches.
Inconvénients
- Il faut être très attentif au « système de coordonnées » utilisé, et bien régler le récepteur afin qu'il fournisse les coordonnées dans le système de référence utilisé actuellement en aéronautique : Le système WGS 84.
- L'utilisation de cette technique nécessite la présence « d'électricité » à bord (panne du système si manque d'énergie à bord, particulièrement pour les planeurs)
Le système GPS des États-Unis était le premier en service. Depuis, ces systèmes sont disponibles :
-
Antenne d'un récepteur GNSS, environ 3cm de côté. Elle doit avoir une vue dégagée vers le ciel.
-
Coordonnées de Latitude et Longitude données par un récepteur GNSS d'ancienne génération (sans carte)
-
Récepteurs GNSS à bord d'un planeur avec affichage sur carte interactive (au centre).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Exercices
Ces documents sont disponibles afin de stimuler l'apprentissage par d'autres moyens que la simple lecture. Chacun est libre de les utiliser comme il l'entend: en autonomie, dans le cadre d'un devoir donné par un ATO/DTO, en TP lors de cours en DTO...etc. Wiki-SPL.net propose le contenu mais n'a pas vocation à répondre aux demandes d'aides à l'apprentissage. Ce rôle est assuré par les formateurs des ATO/DTO dont il faudra se rapprocher !
- Cahier d’exercices N°1 Document à imprimer. Prévoir un matériel basique (règle, crayon, rapporteur...).
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a trois méthodes de navigation :
Le cheminement
Cheminer consiste à utiliser les repères au sol caractéristiques et bien visibles depuis un aéronef. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps. On appelle aussi cheminement le fait de se diriger, à vue, de repères en repères situés à proximité l'un de l'autre.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
En vol, il est courant de confondre différents repères et ainsi avancer dans une mauvaise direction. A court terme, cela engendre une situation d’égarement. Pour garder une bonne conscience de la situation, le pilote doit évaluer le niveau de certitude de sa position :
- 1 à 2 repères = position peu sûre à conforter au plus vite,
- 3 à 4 repères = position fiable,
- 5 à 6 repères = position très fiable...
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct (une ligne droite) et que le cheminement n'est pas possible par manque de repères (ou des repères trop éloignés l'un de l'autre).
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères.
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon.
Pour naviguer à l'estime, les notions entre les différentes Vitesses sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées :
- La Vitesse Indiquée : En vol, l'indicateur de vitesse affiche la Vitesse Indiquée (VI ou IAS pour Indicated Air Speed en anglais). Cette indication n'est pas exacte.
- La Vitesse Conventionnelle : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument. Lorsque besoin, le manuel de vol explique la façon de déduire la Vc depuis la Vi (Vc ou CAS pour Calibrated Air Speed en anglais);
- La Vitesse Vrai : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou TAS pour True Air Speed en anglais);
- La Vitesse Propre : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp);
- La Vitesse équivalente : C'est la vitesse d'un aéronef, corrigée des effets de la compressibilité à l'altitude donnée (Ev ou EAS pour Equivalent Air Speed en anglais)
- La Vitesse sol : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou GS pour Ground Speed en anglais). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation).
-
Vent de face, la vitesse sol est plus faible.
-
Vent arrière, la vitesse sol est plus élevée.
-
les composantes d'un vent quelconque.
Pour naviguer à l'estime, il est nécessaire de connaître ces définitions :
- ETA : Estimated Time of Arrival en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé.
- la Route : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de Route vrai) ou par rapport au Nord magnétique (on parle de Route magnétique);
- le Cap : C'est la direction de la ligne de fois de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le cap compas), au Nord magnétique (le cap magnétique), ou au Nord vrai (le cap vrai).
- Le vent (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le vent effectif qui est la composante venant de face ou de l'arrière, et le vent de travers qui est la composante venant perpendiculairement à la trajectoire.
- la Dérive : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la correction de dérive ou angle de correction de dérive. En l'absence de vent de travers, le cap et la route sont identiques.
-
les composantes d'un vent quelconque.
-
La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive.
-
Après application d'un cap au vent pour créer un angle de correction de dérive.
Le computer de navigation
Un computer de navigation est une forme de règle à calcul circulaire utilisée dans l' aviation. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation.
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation aérienne est l'ensemble des techniques permettant à un pilote d'aéronef de maîtriser ses déplacements. La navigation permet à l'aéronef de suivre une trajectoire appelée route.
La navigation aérienne est largement héritière de la navigation maritime et la terminologie utilisée est identique.
Aux débuts de l'aviation, les navigations se faisaient à vue. En cas de conditions de visibilité dégradées, des phares aéronautiques jalonnaient certains tronçons de routes régulièrement empruntées, comme celle de l'Aéropostale qui amenaient le courrier de la France vers l'Afrique puis l’Amérique du Sud.
Au cours de la seconde moitié du XXe siècle, s’est développée la radionavigation. Au début du XXIe siècle, la navigation aérienne utilise largement le GPS.
Définitions
Le système solaire
Les variations saisonnières de la position du soleil sont créées par l'inclinaison de l'axe de rotation de la Terre par rapport au plan de son orbite autour du Soleil (écliptique). Pour un observateur terrestre, tout au long de l'année, le Soleil, bien que fixe, semble avoir une trajectoire différente dans le ciel. L'été est la saison où la journée dure le plus longtemps et le soleil monte le plus haut dans le ciel.
-
Alternance des saisons sur une année.
-
Mouvement apparent du soleil durant la journée pour un observateur situé dans l'hémisphère nord, en France
Se repérer sur la Terre
Afin de se repérer sur la sphère terrestre, la sphère est quadrillée par :
- Des Parallèles. Lorsqu'on se déplace vers le Nord ou le Sud (en restant sur le même méridien), on change de parallèle. Les Parallèles sont numérotés en degrés (0° étant l'équateur) plus une indication Nord ou Sud. le pôle Nord est numéroté 90°N. Paris se situe au niveau du parallèle 48,8°N. Il s'agit de la coordonnée de Latitude
- Des Méridiens. Lorsqu'on se déplace vers l'Ouest ou l'Est (en restant sur le même parallèle), on change de méridien. Les méridiens sont numérotés en degrés (0° étant le méridien passant par l'observatoire royal de Greenwich) plus une indication Ouest ou Est. Paris se situe au niveau du méridien 2,3°E. Il s'agit de la coordonnée de Longitude
-
Principaux parallèles, permettant de mesurer la Latitude et Principaux méridiens, permettant de mesurer la Longitude
Les coordonnées peuvent être exprimées de deux manières :
- Expression en degrés et décimale : La tour Eiffel à Paris se situe exactement aux coordonnées 48.8582N, 2.2945E
- Expression en degrés, minutes et secondes : parfois noté « DMS ». Chaque degré est divisé en 60minutes (1°=60'), puis chaque minute et divisé en 60secondes (1'=60"). La tour Eiffel se situe exactement aux coordonnées 48°51'29"N, 2°17'40"E
Les parallèles et les méridiens sont des arcs de cercles. Il est possible de les classer en 2 catégories :
- Ceux qui sont dit Grand cercles : l'arc de cercle à pour centre le centre de la terre, sont rayon est toujours égal à celui de la terre. Tous les méridiens sont des grand cercles. L'équateur est aussi un grand cercle.
- Ceux qui sont dit Petit cercles : tous les autres cercles n'ayant pas pour centre le centre de la terre. Mis a part l'équateur, tous les parallèles sont des petits cercles.
L'intérêt de cette classification est l'exploitation des Grands Cercles : leur périmètre est toujours égal au périmètre de la terre, c'est à dire environ 40 000km. Par exemple, tout déplacement de 0°01'00" en coordonnés le long d'un grand cercle fera toujours la même distance :
la longueur d'une minute d'arc (0°01'00") au niveau d'un grand cercle est la définition d'un Mille marin (nautique miles en anglais, noté NM). Cette astucieuse définition permet de calculer rapidement la distance qui sépare deux coordonnées. En ignorant les secondes d'arc, la distance entre la tour Eiffel (48°51'N, 2°17'E) et la tour de Pize (43°43'N, 10°23'E) est 05°08' sur l'axe Nord/Sud (soit 308NM).
Le temps
Le temps est une notion indispensable en navigation. Les divisions qui permettent de mesurer le temps sont faciles à appréhender et universelles : l'année, le jour, l'heure, la minute...etc. Le point de référence est beaucoup plus délicat car il en existe un certain nombre :
- LMT, Local Mean Time en anglais. C'est l'heure qui a pour référence le soleil. Lorsque le soleil est au zénith, la montre est réglée à 12h00. Cette référence dépend donc de la position géographique. Chaque endroit possède son heure LMT. Ce système est peu pratique et n'est quasiment plus utilisé aujourd'hui.
- Heures légales. Il s'agit d'une heure de référence pour un large territoire afin de résoudre les problèmes posés par l'heure LMT. Ce sont notamment les fuseaux horaires : la terre est décomposé en 24 fuseaux de 60minutes chacun qui possèdent tous leur propre heure légale de référence.
- UTC, Universal Time Coordinated en anglais. C'est une heure de référence mondiale, qui a pour référence le méridien d'origine 0°(Greenwich). A 12h UTC, le soleil est au zénith à Greenwich, mais il fait nuit dans l'Océan Pacifique. Les dénominations heure GMT] ou heure TU peuvent être considérées identique à l'heure UTC. Cette explication est en fait approximative mais suffisante pour le pilote planeur.
En aéronautique, les heures sont souvent définies en heure UTC car il est plus facile d’œuvrer avec une seule référence quelque soit le lieu ou le moment. Pour que le pilote puisse utiliser sa montre réglée en heure locale, il faudra ajouté l'écart entre l'heure UTC et son heure légale. En France, le décalage par rapport à l'heure UTC est : UTC+1 en hiver et UTC+2 en été.
La ligne de changement de date est une ligne imaginaire, à la surface de la Terre, approximativement située au 180e méridien (est et ouest) dans l'océan Pacifique ; son rôle est d'indiquer l'endroit où il est nécessaire de changer de date quand on la traverse. Les pilotes planeur européen sont peu concerné par cette notion.
Afin de définir les heures auxquelles la luminosité est suffisante pour entreprendre un vol VFR de jour, il est nécessaire de définir :
- le lever du soleil, SunRise en anglais (SR) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le matin.
- Le coucher du soleil, SunSet en anglais (SS) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le soir.
- le crépuscule civil : C'est la période où le centre du Soleil est situé à moins de 6° sous la ligne d'horizon.
La journée aéronautique durant laquelle le vol VFR de jour est possible commence au début du crépuscule avant le lever du soleil et se termine à la fin du crépuscule après le coucher du soleil. Aux latitudes moyennes (30 à 60°) cette définition est souvent simplifié, la journée aéronautique commence à SR-30min et se termine à SS+30min
Les directions
Afin de donner une direction, les points cardinaux sont utilisés. Pour un degré de précision plus important dans l'expression d'une direction, un angle est exprimé en prenant le Nord comme référence.
-
Rose des vents, indiquant les points cardinaux.
-
Rapporteur permettant d'exprimer une direction par un angle.
Les Distances
Les distances horizontales sont exprimées en Mille marin ou en kilomètres.
- Pour convertir rapidement des Nautiques Miles en kilomètres par calcul mental, une bonne approximation (erreur de 3%) est : prendre le double (x2), et retirer 1/10e.
Les distances verticales sont exprimées en Pied ou en Mètre.
- Pour convertir rapidement des Pieds en Mètres par calcul mental, une bonne approximation (erreur de 1.5%) est : multiplier par dix (x10), diviser par trois (/3).
- Pour convertir rapidement des Mètres en Pieds par calcul mental, une bonne approximation (erreur de 1.5%) est : diviser par dix (/10), multiplier par trois (x3).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Magnétisme et compas
Le compas est un instrument de bord permettant de mesurer la direction en utilisant le champ magnétique terrestre. Son fonctionnement est similaire à celui d'une boussole. C'est un instrument simple, mais les limitations de la mesure grâce au champ magnétique sont multiples :
- Le champ magnétique terrestre n'est pas aligné avec l'axe de rotation de la terre. Le compas indique les directions par rapport à la direction du pôle Nord magnétique, qui n'est pas au même endroit que le pôle Nord géographique. On dit que la différence entre les deux directions magnétiques et géographiques est la déclinaison magnétique.
-
Déclinaison magnétique. Le compas indique le pôle Nord magnétique.
- Le Nord magnétique bouge notablement en 6 à 12mois. La déclinaison doit être mise à jour régulièrement. Des cartes spécifiques présentent la déclinaison en fonction de chaque position sur terre. Les lignes qui joignent les endroits d'égale déclinaison sont appelées lignes isogones. En France et à notre époque, par chance, la déclinaison est négligeable (proche de 0°).
-
Évolution de la déclinaison entre 1590 et 1990 en fonction de la position sur la Terre, par représentation des lignes isogones. Cliquer pour voir l'animation.
-
Lignes d'égale déclinaisons magnétiques (les isogones) en France en 2020 (en orange clair). Service de l’Information Aéronautique - Données originales téléchargées sur https://www.sia.aviation-civile.gouv.fr, mise à jour du 26 mars 2020.
- Le compas est instrument imparfait. Il n'indique pas parfaitement le Nord magnétique. Ceci est dû au compas lui-même mais aussi à l'installation dans l'aéronef. On dit que cette erreur est la déviation. Cette erreur dépend de la direction qu'il indique. Une table de correction est disponible à proximité immédiate du compas.
-
Courbe de déviation en fonction des directions mesurées pour un compas maritime.
-
Le cap compas indiqué est de 45°. La déviation indiquée par la table (en rouge) est entre -2° et -5°. Le cap magnétique est donc de l'ordre de 42°.
Afin d'obtenir la vrai direction, les erreurs de déclinaison et déviation doivent être retirées par calcul :
-
Correction de la déviation et de la déclinaison après lecture du cap compas. Dans l'autre sens, procéder aux correction en inversant le signe.
Le compas mesure la direction du champ magnétique là où il se trouve. Tout éléments qui génère un champ magnétique peut l'influencer, il en résultera une indication de direction très erronée. Le pilote doit prendre les précautions nécessaires pour garantir la bonne indication du compas :
- un aimant placé à proximité d'un compas : des aimants sont présents dans les casques utilisé dans les aéronefs, les téléphones...
- les systèmes électriques de l'aéronef génèrent divers champs magnétiques dû à la circulation du courant électriques dans les câbles. Le fonctionnement de certaines servitudes électriques peut donc influencer le compas.
- les masses métalliques ferromagnétiques, même sans être des aimants, posent problèmes. Un stylo qui possède un corps métallique à proximité immédiate d'un compas rend son indication fausse.
Enfin, le compas indique une valeur correcte en ligne droite en l'absence de turbulence importante. Il ne faut pas prendre en compte l'indication d'un compas :
- lors d'un virage;
- lors de turbulences importantes.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Cartes
Une carte présente des informations en fonction de la position considérée. En aéronautique, ces informations concernent les repères visibles, les angles, les distances, les informations sur l'espace aérien...etc. Il est nécessaire d'appréhender les codes de conception et de lecture des cartes pour une utilisation correcte.
Le type de projection cartographique
La projection cartographique est un ensemble de techniques permettant de représenter une surface non plane (surface de la Terre, d'un autre corps céleste, du ciel, ...) dans son ensemble ou en partie sur la surface plane d'une carte. L'impossibilité de projeter le globe terrestre sur une surface plane sans distorsion explique que diverses projections aient été inventées, chacune ayant ses avantages :
- La projection de Mercator : C'est une projection cylindrique. Les méridiens et les parallèles sont des droites perpandiculaires qui quadrillent le plan. Cette projection conforme conserve les angles (ce qui permet de reporter directement sur la carte les angles mesurés au compas, et vice-versa) mais ne conserve ni les distances, ni les surfaces (l'échelle de la carte variant avec la latitude). Sauf le long de l'équateur. Une ligne droite sur une carte de Mercator ne représente pas la distance la plus courte en réalité. C'est en revanche une ligne d'azimut constant (c'est-à-dire une loxodromie), particulièrement utile pour naviguer à cap constant, même si le trajet ainsi défini n'est généralement pas sur un grand cercle et n'est donc pas le chemin le plus court.
-
Projection cylindrique projection Mercator.
-
Exemple de projection cylindrique avec déformation des distances importante au niveau des pôles.
- La projection conique conforme de Lambert : C'est une projection conique. Les méridiens sont des droites convergentes en un point, les parallèles sont des cercles concentriques autour de ce même point. Elle conserve également les angles. Elle conserve les distances sur le parallèle de référence. Il est donc particulièrement intéressant d'utiliser une projection de Lambert ayant son parallèle de référence sur la zone à exploiter. A proximité du parallèle de référence, une ligne droite sur une projection de Lambert représente la distance la plus courte en réalité (c'est-à-dire une orthodromie).
-
Projection conique type projection de Lambert.
-
Exemple de projection conique.
Les cartes utilisées par le pilote planeur
- La carte permet de représenter les éléments visibles au sol. En France, l'IGN fourni diverses cartes. Ces cartes sont par exemple disponibles en version numérique sur la plateforme Géoportail. L'expérience montre que pour un vol en planeur, une carte avec représentation schématique des éléments facilement identifiables en vol est la plus adaptée.
- La carte permet également de présenter sous forme graphique une partie des informations aéronautiques présentes dans les AIP (Aeronautical Information Publication en anglais) : aérodromes, espaces aériens, fréquences radio, systèmes de radionavigation...etc
Divers organismes proposent des cartes spécifiques à l'usage aéronautique pour différents besoins. En France, c'est principalement le SIA (Service de l'Information Aéronautique) qui éditer les cartes. En partant de la plus grande échelle, les cartes régulièrement utilisées pour le vol en planeur sont :
- La carte du SIA au 1/1 000 000ème : utilisée principalement pour de la radionavigation en route. Elle couvre l'espace du sol au FL195. Disponible en version numérique sur le site web du SIA
- La carte du SIA au 1/500 000ème : utilisée principalement pour de la navigation en route en vol à vue. Elle couvre l'espace du sol au FL115 (ou 3000ft ASFC, le plus élevé des deux). Disponible en version numérique sur Géoportail.
- Les cartes VAC (Visual Approach Chart en anglais) : Il s'agit d'une présentation de l'aérodrome dans son environnement. On y trouve une carte détaillée de l'aérodrome, le sens du tour de piste, ainsi que d'autres indications utiles pour y atterrir en vol à vue. Disponible en version nuémrique sur le site web du SIA
- D'autres types de cartes qui émanent d’initiatives privées ou associative pour répondre à un usage particulier.
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Carte VAC de Chalons Vatry. Source SIA
Les cartes aéronautiques sont réalisées selon un cahier des charges précis définie par l'annexe 4 de l'OACI. Cette annexe est disponible en lecture sur la librairie électronique de l'OACI. Les cartes sont mises à jour régulièrement, tous les 6 ou 12 mois.
La légende de la carte du SIA au 1/500 000ème (version 2021 disponible ici) est disponible sur Géoportail (icône "information de la couche > afficher la légende). Les symboles principaux doivent être connus du pilote de planeur. liste non-exhaustive :
- Aérodrome avec bande en herbe ou piste en dur
- Les chiffres simples sans décimales indiquent des altitudes
- Les chiffres entre parenthèses indiquent des hauteurs
- Les chiffres à trois décimales indiquent des fréquences VHF pour la radiocommunication
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Symboles détaillant les aérodromes
-
Symboles détaillant les villes et rappelant les règles de survol
Exploitation des cartes
De la carte à la réalité : Mesure de la direction et de la distance
- La direction se mesure grâce à un rapporteur. L'objectif est de mesurer l'angle que forme la route avec le méridien le plus proche. Une route à l'Est vaut 90°, au Sud 180°, à l'Ouest 270°. Une prudence particulière doit être prise pour ne pas confondre le sens de la route, ce qui occasionnerait une erreur de 180°.
- La distance se mesure grâce à une règle graduée entre deux points. En considérant que l'erreur d'échelle est négligeable (voir anomalies dû à la projection Lambert conique), il fait multiplier la distance mesurée par l'échelle de la carte afin d'obtenir la distance réelle.
-
Mesure de la direction d'une route entre Brienne et Vatry.
-
Mesure de la distance entre Brienne et Vatry par 2 méthodes. 1) 8.6cm x 500 000 = 43.5km. 2)utiliser un méridien comme règle gradué en y reportant la longueur : 00°24'00" = 24NM = 44.5km. L'écart de 1km est peu important.
De la réalité à la carte : Tracer un relèvement et un éloignement
- Un relèvement est la détermination de l'angle que fait, dans le plan horizontal, la ligne d'un observateur (le pilote) vers un objet avec celle d'une direction de référence fixe (le Nord géographique dans le cas le plus courant). Cette angle est mesuré en vol puis reporté sur la carte.
- Un éloignement est une distance déterminée en vol entre l'aéronef et un point géographique connu. Cette distance est ensuite reportée sur la carte.
Avec au minimum 2 relèvements, ou 1 relèvement et 1 éloignement, il est possible de connaître sa position sur une carte.
-
Tracé de 2 relèvements pour déterminer sa position (ces relèvements peuvent par exemple être transmit par le contrôle aérien de chacun des aérodromes par radiogoniométrie des émissions de l'aéronef).
-
Tracé d'un relèvement et d'un éloignement (provenant par exemple d'une estimation grâce au temps de vol et à la vitesse sol).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a trois méthodes de navigation :
Le cheminement
Cheminer consiste à utiliser les repères au sol caractéristiques et bien visibles depuis un aéronef. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps. On appelle aussi cheminement le fait de se diriger, à vue, de repères en repères situés à proximité l'un de l'autre.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
En vol, il est courant de confondre différents repères et ainsi avancer dans une mauvaise direction. A court terme, cela engendre une situation d’égarement. Pour garder une bonne conscience de la situation, le pilote doit évaluer le niveau de certitude de sa position :
- 1 à 2 repères = position peu sûre à conforter au plus vite,
- 3 à 4 repères = position fiable,
- 5 à 6 repères = position très fiable...
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct (une ligne droite) et que le cheminement n'est pas possible par manque de repères (ou des repères trop éloignés l'un de l'autre).
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères.
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon.
Pour naviguer à l'estime, les notions entre les différentes Vitesses sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées :
- La Vitesse Indiquée : En vol, l'indicateur de vitesse affiche la Vitesse Indiquée (VI ou IAS pour Indicated Air Speed en anglais). Cette indication n'est pas exacte.
- La Vitesse Conventionnelle : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument. Lorsque besoin, le manuel de vol explique la façon de déduire la Vc depuis la Vi (Vc ou CAS pour Calibrated Air Speed en anglais);
- La Vitesse Vrai : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou TAS pour True Air Speed en anglais);
- La Vitesse Propre : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp);
- La Vitesse équivalente : C'est la vitesse d'un aéronef, corrigée des effets de la compressibilité à l'altitude donnée (Ev ou EAS pour Equivalent Air Speed en anglais)
- La Vitesse sol : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou GS pour Ground Speed en anglais). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation).
-
Vent de face, la vitesse sol est plus faible.
-
Vent arrière, la vitesse sol est plus élevée.
-
les composantes d'un vent quelconque.
Pour naviguer à l'estime, il est nécessaire de connaître ces définitions :
- ETA : Estimated Time of Arrival en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé.
- la Route : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de Route vrai) ou par rapport au Nord magnétique (on parle de Route magnétique);
- le Cap : C'est la direction de la ligne de fois de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le cap compas), au Nord magnétique (le cap magnétique), ou au Nord vrai (le cap vrai).
- Le vent (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le vent effectif qui est la composante venant de face ou de l'arrière, et le vent de travers qui est la composante venant perpendiculairement à la trajectoire.
- la Dérive : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la correction de dérive ou angle de correction de dérive. En l'absence de vent de travers, le cap et la route sont identiques.
-
les composantes d'un vent quelconque.
-
La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive.
-
Après application d'un cap au vent pour créer un angle de correction de dérive.
Le computer de navigation
Un computer de navigation est une forme de règle à calcul circulaire utilisée dans l' aviation. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation.
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère. Modèle en boucle détecté : 9-5 Techniques de Navigation en vol (motoplaneurs) Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Utilisation du Service d'Information de Vol
Le Service d'Information de Vol, souvent appelé SIV (traduit de Flight Information Service ou FIS en anglais) est un service apporté à tout aéronef évoluant dans une Région d'information de vol (traduit de Flight Information Region ou FIR en anglais). Une FIR s'étant du sol au FL195. A l'intérieur d'une FIR, le Service d'Information de Vol peut être rendu par différentes entités, suivant l'endroit où l'aéronef évolue :
- Lorsque l'aéronef évolue dans un espace aérien contrôlé (classe d'espace E, D, C, B, A), il est rendu par les services du contrôle.
- Lorsque l'aéronef évolue en classe d'espace G, il est rendu par un centre de service de la circulation aérienne proche.
Pour l'aviation générale en France, le Service d'Information de Vol est disponible durant tout le vol. Dans le cadre du Service d'Information de Vol, l'organisme (contacté par radio) peut transmettre des renseignements (règlementation SERA, article SERA.9005):
- sur la disponibilité des services de radionavigation;
- sur les modifications de l’état des aérodromes et des installations et services connexes, y compris des renseignements sur l’état des aires de mouvement lorsque leurs caractéristiques sont modifiées par la présence de neige, de glace ou d’une épaisseur significative d’eau;
- sur les conditions météorologiques observées ou prévues aux aérodromes de départ, de destination et de dégagement;
- sur les risques de collision;
- sur les renseignements disponibles sur la circulation et les conditions météorologiques le long de la route lorsque ces conditions sont susceptibles de rendre impossible la poursuite du vol selon les règles de vol à vue ;
- sur tout autre renseignement susceptible d’avoir une incidence sur la sécurité.
- Cette liste est réduite aux informations utiles au vol en planeur.
Dès que besoin, le pilote peut bénéficier du SIV en contactant le service adéquat par radio. C'est un service gratuit, permettant d'augmenter le niveau de sécurité.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Bases de la propagation des ondes radioélectrique
Aujourd'hui, beaucoup de systèmes fonctionnent avec des ondes radioélectriques comme le téléphone sans fil ou la télévision. En aéronautique, la possibilité de transmettre des informations grâce à des ondes radioélectriques est très utile comme par exemple pour communiquer oralement, donner des informations de direction, ou encore des informations de position...etc.
Afin d'exploiter correctement ces systèmes, et surtout d'en connaître les limitations respectives, il est nécessaire d'aborder brièvement leur fonctionnement.
Caractéristiques des Antennes : Les ondes électromagnétiques sont émises par des antennes. La forme et la taille de l'antenne peut être très différent suivant :
- La fréquence de l'onde électromagnétique utilisée : Pour un même type d'antenne, plus la fréquence est élevée et plus l'antenne est petite.
- La directivité de l'antenne : Une antenne peut émettre dans toutes les directions (utile en communication radio), ou alors seulement dans une direction particulière (utile pour un radar). Toutes les antennes connaissent des "angles morts" où elles n'émettent (ou ne reçoivent) pas du tout.
- La puissance de l'onde à émettre : Une antenne de forte puissance ou prévue pour capter de très faibles signaux est généralement plus grande.
-
Antenne pour la communication VHF (118 à 137 MHz)
AJOUTER PHOTO ANTENNE Flarm, Antenne GPS, Antenne transpondeur, Antenne VOR, antenne VDF
La Propagation des ondes : Suivant la fréquence de l'onde utilisée, la propagation des ondes radio est différente. Les concepteurs des systèmes aéronautiques choisissent la fréquence la plus adaptée au besoin du système. Les 3 types de propagation sont :
- les ondes de sol (0.03 à 0.3 MHz) : C'est lorsque l'onde se propage en suivant la courbure de la terre. Utile pour établir des communication mondiales, mais la puissance nécessaire est très importante.
- les ondes de ciel (1 à 30MHz) : C'est lorsque l'onde est capable d'être réfléchie par une couche de l'atmosphère (la ionosphère) et sur le sol, permettant par exemple d'établir des communications entre deux vallées encaissées et des communications mondiales avec plusieurs rebonds.
- les ondes directes (30MHz et plus) : C'est lorsque l'onde se propage en ligne droite, et sont arrêtées par les obstacles. C'est la portée optique. Pour établir une transmission entre un émetteur et un récepteur, il faut que ces derniers puisse se voir. Les montagnes peuvent empêcher la propagation (les bâtiments dans une moindre mesure), mais c'est surtout le fait que la terre soit ronde qui limite la portée optique. Dans le cas du franchissement de l’horizon, plus l'émetteur et le récepteur sont haut, et plus la portée optique est grande. Il est possible de calculer la portée optique avec l'altitude de l'aéronef (h) en mètre : . Il faut noter que cette formule ne prend en compte que les contraintes géométriques de la Terre. En tenant compte de l'atmosphère terrestre, la portée est légèrement plus grande.
-
La propagation par onde de sol sur la surface de la Terre.
-
La propagation par onde de ciel réfléchie entre ciel et terre.
-
La propagation par onde directe (portée optique).
La puissance de l'onde : La puissance émise par une antenne se propage et se répartie dans plusieurs directions. Au fur et à mesure que l'onde s'éloigne de son antenne, sa puissance émise se dilue sur une zone de plus en plus grande. Il est possible que pour un récepteur très éloigné, la puissance soit trop diluée (trop faible) et qu'aucun signal ne soit détecté. La portée est donc limitée par la puissance émise et par la sensibilité du récepteur. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Radiogoniométrie au sol Le principe est de déterminer la direction d'une émission radioélectrique. Au sol, ce principe est utilisé par les services de la Circulation Aérienne pour déterminer d'où provient l'onde radioélectrique de l'aéronef qui est en train de parler. Pour eux, c'est une aide importante pour comprendre la situation rapidement. Pour le pilote planeur, l'information de QDR (Relèvement magnétique en code Q) peut être obtenue sur simple demande par radio :
- Avec le QDR provenant de deux organismes de contrôles différents et une carte, il est possible d'obtenir sa position.
- Avec le QDR provenant d'un contrôleur d'aérodrome, il est possible de calculer une route pour prendre la direction de l'aérodrome (QDM en code Q). Le QDM est l’inverse du QDR (QDM = QDR +/-180°).
En France, tous les organismes de contrôle aérien disposent normalement d'un Radiogoniomètre. Dès qu'une communication radio est établie (portée optique), il est possible d'obtenir un QDR ou un QDM. Voici un exemple de demande à faire par radio :
- "Orléans info du motoplaneur F-CCUY, je suis égaré, pouvez vous me donner un QDR par rapport à l'aérodrome d'Orléans?"
- "F-CCUY de Orléans info, vous êtes dans le relèvement magnétique 145°"
- "Orléans info du F-CCUY, 145°, je vous remercie"
La précision des systèmes de radiogoniométrie moderne est bonne.
NDB/ADF (Radiocompas)
Le radiocompas est un système basé sur la radiogoniométrie. Des balises au sol placées aux points clefs des trajectoires des aéronefs émettent en permanence sur une fréquence comprise entre 190 et 1 750 kHz (en France, principalement entre 280 et 450 kHz). A bord de l'aéronef, un système de radiogoniométrie permet de mesurer l'angle entre la balise et l'axe longitudinal de l'aéronef.
- NDB : Non Directional Beacon en anglais, Balise Non Directionnelle en français. Il s'agit du nom de la balise au sol.
- ADF : Automatic Directional Finder en anglais, Radiocompas en français. Il s'agit du nom de l'instrument implanté à bord de l'aéronef.
La fréquence utilisée permet la propagation en onde de sol. La portée n'est donc pas limité par l'horizon. Seule la puissance émettrice de la balise limite la portée.
Limitations du système ADF : le signal est affecté par les conditions atmosphériques, les terrains montagneux, la réfraction côtière et les orages, notamment sur les longues distances.
Utilisation :
- Le pilote souhaite exploitée une balise indiquée par sa carte;
- Il entre la fréquence de la balise sur son radiocompas;
- Pour vérifier que la bonne balise est sélectionnée, il écoute le message en morse qu'émet la balise toute les 15 secondes (3 lettres indiquées sur la carte);
- Le radiocompas pointe en direction de la balise.
-
Antenne NDB "NKR" à Leimen-Ochsenbach, Allemagne
-
Le symbole du NDB sur une carte. la fréquence de la balise est 428KHz, CTX est son identifiant émit en morse
-
radiocompas
VOR
Un système VOR (VHF Omnidirectional Range en anglais) permet de déterminer un relèvement magnétique par rapport à une station au sol (balise émetteur VOR dont la position est connue), et donc le radial sur lequel l'aéronef est situé. Par déduction, il permet de suivre n'importe quelle route passant par la station (en rapprochement ou en éloignement de celle-ci), ou même de déterminer la position exacte de l'avion en utilisant deux balises VOR (intersection de radiaux) ou un DME (intersection d'un radial et d'un arc DME).
La station au sol utilise la gamme de fréquences VHF de 108 à 117,95 MHz (donc une portée optique). Plus intéressant que le radiocompas, le VOR est moins soumis aux perturbations extérieures, telles celle de l'ionosphère ou simplement les nuages.
L'indicateur à bord qui permet de lire les indications du VOR se nome OBI (Omnidirectional Bearing Indicator en anglais). Il est composé de plusieurs indicateurs :
- le FLAG qui permet de savoir si on reçoit ou non le signal de la station VOR
- un bouton OBS (Omnidirectional Bearing Selector) pour choisir le radial auquel on souhaite se comparer
- une aiguille de déviation qui indique le résultat de la comparaison : si on se trouve à droite, à gauche ou sur le radial choisi
- derrière l'aiguille, une échelle indique l'amplitude de l'écart. Chaque point représente un écart de 2° soit une indication de 10° max de chaque côté
- un indicateur TO / FROM qui permet de savoir si on est en situation de rapprochement ou d’éloignement de la station sol
Utilisation :
- Le pilote souhaite exploitée une balise VOR indiquée par sa carte;
- Il entre la fréquence de la balise sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise (3 lettres indiquées sur la carte);
- Si le pilote souhaite intercepter un radial donné, il choisi le radial souhaité avec le bouton OBS et l'intercepte lorsque l'aiguille de déviation n'indique plus d'écart
- Si le pilote souhaite connaître le radial sur lequel il se trouve, il tourne le bouton OBS jusqu'a ce que l'aiguille de déviation n'indique plus déviation. L'indicateut TO/FROM lui permet de lever le doute entre QDR et QDM.
-
Vue aérienne d'un ensemble d'antenne d'une balise VOR de Sprimont "SPI" en Belgique
-
Le symbole du VOR sur une carte. la fréquence de la balise est 110.2MHz, DVL est son identifiant émit en morse
-
Omnidirectional Bearing Indicator. L'aiguille de déviation est au centre (5 graduations de chaque côté). L'indicateur TO/FROM indique FROM. Le radial sélectionné est le 252°.
DME
Un système DME (Distance Measuring Equipment en anglais) permet de connaître la distance oblique qui sépare un aéronef d'une station au sol en mesurant le temps que met une impulsion radioélectrique pour faire un aller-retour.
- Une station sol DME est typiquement implantée avec un VOR. On parle alors de station sol VOR/DME.
- Le DME est fonctionnellement identique au composant distance du TACAN, c'est dire qu'un utilisateur de DME peut exploiter les stations sol TACAN.
- Une station sol DME basse puissance peut être implantée avec un ILS pour mesurer la distance par rapport au seuil de piste lors d'une finale sans visibilité.
La station au sol utilise la gamme de fréquences UHF de 962 à 1 213 MHz (donc une portée optique) qui sont appariées à celles des VOR et des ILS : c'est à dire que la fréquence du DME est automatiquement sélectionnée lorsque le pilote renseigne la fréquence du VOR ou le l'ILS. A noter que c'est la distance oblique qui est mesurée, donc si l'aéronef passe à la verticale de la station sol, le DME indiquera la hauteur de l'aéronef.
l'OACI préconise une précision minimum de ±(0,25 milles nautiques + 1,25 % de la distance). Une station sol peut gérer environ 100 aéronefs. Au delà, elle ignore les aéronefs les plus loin.
Utilisation :
- Le pilote souhaite exploitée une balise VOR/DME indiquée par sa carte;
- Il entre la fréquence de la balise VOR sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise un peu plus aigüe que le code du VOR (3 lettres indiquées sur la carte);
- La distance oblique s'affiche à l'écran quelques secondes plus tard.
- Si l'aéronef est très éloigné par rapport à une station sol, il sera dans les premiers à perdre l'information si la balise devient saturée.
-
Vue d'antenne DME seule.
-
Le symbole du VOR/DME sur une carte. la fréquence du VOR 116.7MHz doit être sélectionnée pour utiliser le DME appariée, MOU est son identifiant émit en morse
-
Afficheur DME. En exploitant la variation de la distance en fonction du temps, il peut indiquer une vitesse sol radiale, et le temps restant pour atteindre la balise.
Les Radars
Radar primaire au sol
Le radar (acronyme issu de l'anglais RAdio Detection And Ranging) est un système qui utilise les ondes électromagnétiques pour détecter la présence et déterminer la position des aéronefs. Les ondes envoyées par l'émetteur sont réfléchies par la cible, et les signaux de retour (appelés écho-radar) sont captés et analysés par le récepteur. La distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne. L'altitude ne peut pas être mesurée, bien que les systèmes modernes et plus élaborés parviennent à donner une indication d'altitude.
Ce principe de Radar ne nécessite aucun instrument à bord de l'aéronef et est appelé Radar primaire. La fréquence utilisée est choisie pour être réfléchies par les aéronefs sans être (trop) perturbée par les phénomènes météo. La portée est la portée optique. Les puissances émises sont très importantes car l'onde doit faire le voyage aller, être partiellement réfléchie par l'aéronef, et faire le voyage retour.
Généralement, le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), et proche de lui (impossibilité de recevoir le signal tant que l'antenne émet). Comme le système est à portée optique, un aéronef en basse altitude masqué par un relief n'est pas visible. Ce type de radar n'est pas forcement disponible par tous les centres de contrôles.
Utilisation :
- le radar balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les échos-radar s'affichent sur l'écran du contrôleur aérien, mais le système ne donne aucune information sur ces plots radar.
- classiquement, le radar primaire ne permet pas de connaître l'altitude de l'aéronef
-
Principe du radar primaire.
-
Antenne du radar primaire, dans un couple radar primaire + radar secondaire.
-
Type d'écran de radar primaire non filtré avec tous les échos-radar parasites.
Radar de surveillance secondaire
Le radar secondaire (ou SSR pour Secondary Surveillance RADAR en anglais), est un dispositif radar de contrôle aérien qui « interroge » les aéronefs équipés d'un transpondeurs qui sont à sa portée. Les transpondeurs interrogés répondent au radar en envoyant le code à 4 chiffre entré par le pilote (ce code est communiqué par le contrôle aérien par radio). Les réponses des avions sont captées et analysées par le récepteur. Comme pour le radar primaire, la distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne, et l'altitude ne peut pas être mesurée. L’intérêt du radar secondaire est que chaque plot radar est identifié par le code à 4 chiffres permettant au contrôle aérien d'identifier sans ambiguïté qui est qui.
Pour être visible du contrôle aérien, il est impératif d'avoir un transpondeur en fonctionnement à bord de l'aéronef. La fréquence utilisée est de 1030MHz (interrogations radar sol) et 1090MHz (réponse du transpondeur). La portée est la portée optique (donc un aéronef en basse altitude masqué par un relief n'est pas visible). Les puissances émises sont moins importantes qu'un radar primaire car l'onde ne doit faire que le voyage aller. Le voyage retour est fait l'onde émise par le transpondeur.
Le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), ou proche de lui (technologie de Suppression des Lobes Secondaires) mais la zone est généralement couverte par une antenne voisine. Il a été constaté qu'un planeur en spirale peut temporairement disparaitre des écrans radar.
Les technologies de radar secondaire ont évolué au fil du temps :
- Le mode A : Le mode le plus basique. Le transpondeur répond avec le code SSR composé de 4 chiffres de 0 à 7.
- Le mode C : Le transpondeur répond avec le code SSR + l'altitude pression à laquelle se trouve l'aéronef. Sur l'écran du contrôleur, le plot radar apparait avec le code et l'altitude, permettant une gestion fine de la circulation aérienne.
- Le mode S : Le transpondeur répond avec le code SSR + l'altitude + l'immatriculation + d'autres informations...Sur l'écran du contrôleur, le plot radar apparait avec l'immatriculation et l'altitude. Ce mode permet au contrôleur une meilleure réactivité et de donner le même code SSR à plusieurs aéronefs.
En France en 2020, le radar secondaire mode S est disponible dans une majorité de centres de contrôles.
Lors d'un vol sans service ATS, le pilote peut mettre un code de sa propre initiative afin de transmettre un message particulier :
| Liste des codes SSR à connaître | |
|---|---|
| Code | Signification |
| 7000 | Code à utiliser France en l'absence de d'ATS, pour transmettre sa position et améliorer la sécurité. Obligatoire, sauf pour les aéronefs à autonomie électrique limitée (planeurs pur, ballons...) |
| 7500 | Code pour signifier une intervention illicite (détournement...) |
| 7600 | Code pour signifier une panne des moyens de communication radio |
| 7700 | Code pour signifier une situation d'urgence ou d'interception |
Aussi, le système TCAS (implanté généralement à bord des aéronefs de tailles moyennes) interrogent les transpondeurs de tous les autres aéronefs dans un rayon de quelques dizaines de kilomètres. La position des autres aéronefs est connu, permettant de prévenir les collisions.
- le pilote affiche le code 7000, ou un code donné par l'ATS par radio.
- le radar secondaire balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les réponses des transpondeurs s'affichent sur l'écran du contrôleur aérien. En fonction du Mode (A, C ou S), plus ou moins d'informations apparaissent à côté du plot radar.
- Le contrôleur peut demander à un pilote de mettre Transpondeur IDENT. Le pilote doit appuyer sur le bouton IDENT.
- Le plot radar apparait alors en surbrillance pendant quelques minutes, pour aider l'identification par le contrôleur.
-
Antenne du radar secondaire, dans un couple radar primaire + radar secondaire.
-
transpondeur à bord. Code actif 7000 (en haut), mode A + C + S. Noter le bouton Ident en haut à droite.
-
Type d'écran de radar secondaire. Aéronef 1 : mode C, Alt. 700ft, 70kt. Aéronef 2 : mode S, alt. 2600ft, 70kt. Aéronef 3 : mode S, alt. 200ft, 100kt.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation par satellite est une technique de navigation basé sur système de positionnement par satellites.
Un système de positionnement par satellites (ou GNSS pour Global Navigation Satellite System en anglais) est un ensemble de composants reposant sur une constellation de satellites artificiels permettant de déterminer sa position 3D, sa vitesse 3D et l'heure grâce à un récepteur portable de petite taille. Cette catégorie de système de géopositionnement a pour avantage une précision de l'ordre de 5 à 15 mètres, une couverture quasi-mondiale. A l’inverse, le type d'onde utilisée rend le système sensible aux obstacles présents entre le terminal récepteur et les satellites (immeubles, montagnes...).
En plus de cet ensemble, certains systèmes d'augmentation et de fiabilisation permettent de fiabiliser le système et d'améliorer les performances à une précision de quelques mètres (DGPS, EGNOS, Assisted GPS...).
Mise en œuvre
Le système GPS (le système développé par les États-Unis) repose sur une constellation d'une trentaine de satellites qui permet à un utilisateur, situé sur n'importe quel point du globe, d'avoir toujours au minimum quatre satellites à portée (dans l'hypothèse d'un environnement dégagé d'obstacles dit « clear sky »). Le terminal de l'utilisateur calcule sa position grâce au signal émis par chacun des satellites. À ce stade, la communication est mono-directionnelle, c'est-à-dire que le terminal de l'utilisateur ne fait que recevoir les signaux.
| Informations disponibles sur le récepteur en fonction du nombre de satellites en vue | |
|---|---|
| 2 satellites | Date et heure |
| 3 satellites | Date et heure + position horizontale (latitude et longitude) |
| 4 satellites et + | Date et heure + position horizontale + position verticale (altitude) |
Avantages
- Le système GNSS permet de se positionner très rapidement directement sur une carte.
- De nombreuses fonctions des récepteurs permettent aussi de programmer la route suivie: dans la navigation aérienne sous forme de points tournants pour faciliter le travail du pilote.
- En planeur, le récepteur peut calculer des plans de finesses pour rejoindre les aérodromes proches.
Inconvénients
- Il faut être très attentif au « système de coordonnées » utilisé, et bien régler le récepteur afin qu'il fournisse les coordonnées dans le système de référence utilisé actuellement en aéronautique : Le système WGS 84.
- L'utilisation de cette technique nécessite la présence « d'électricité » à bord (panne du système si manque d'énergie à bord, particulièrement pour les planeurs)
Le système GPS des États-Unis était le premier en service. Depuis, ces systèmes sont disponibles :
-
Antenne d'un récepteur GNSS, environ 3cm de côté. Elle doit avoir une vue dégagée vers le ciel.
-
Coordonnées de Latitude et Longitude données par un récepteur GNSS d'ancienne génération (sans carte)
-
Récepteurs GNSS à bord d'un planeur avec affichage sur carte interactive (au centre).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Exercices
Ces documents sont disponibles afin de stimuler l'apprentissage par d'autres moyens que la simple lecture. Chacun est libre de les utiliser comme il l'entend: en autonomie, dans le cadre d'un devoir donné par un ATO/DTO, en TP lors de cours en DTO...etc. Wiki-SPL.net propose le contenu mais n'a pas vocation à répondre aux demandes d'aides à l'apprentissage. Ce rôle est assuré par les formateurs des ATO/DTO dont il faudra se rapprocher !
- Cahier d’exercices N°1 Document à imprimer. Prévoir un matériel basique (règle, crayon, rapporteur...).
Durant le vol, le pilote navigue facilement grâce à la préparation menée au sol. Toutefois, il sera nécessaire d'évaluer et d'ajuster un certain nombre de paramètres, en croisière le pilote utilise des repères connus pour actualiser les éléments de navigation :
- Actualisation de la vitesse sol : Durant une ligne droite, il va être possible de déterminer sa vitesse sol réelle en fonction de la distance parcourue entre deux repères et le temps passé (chronomètre). Il est possible de corriger la vitesse sol estimée au départ.
- Actualisation de la vitesse et de la direction du vent : Grâce à la connaissance de la vitesse sol et de la dérive constatée en vol, le pilote peut en déduire la vitesse et la direction du vent (triangle des vitesse). Cet élément permet d'actualiser les corrections à apporter sur le prochain segment de navigation.
- Corrections de trajectoires : Si la route suivi n'est finalement pas la route escomptée, le pilote appliquera des corrections de trajectoire. Ces corrections permettent de revenir sur la route et sont plus ou moins forte suivant la nécessité de corriger l'écart rapidement (relief, espaces aériens, nécessité de se rapprocher d'un repère pour éviter l'égarement...)
- Révisions des ETA : L’ensemble des paramètres révisés permettent de conclure à une modification des ETA.
Pour la navigation à vue, et particulièrement la navigation à l'estime, le Journal de navigation ou Log de navigation est une technique de préparation des informations (au sol) et d'actualisation (en vol). Il s'agit d'un petit tableau regroupant les informations de navigation par ordre chronologique (points tournant, route magnétique, distance, carburant, ETA...etc). Bien que le format de base soit commun, chaque pilote peut y ajouter des informations qu'il souhaite retrouver facilement durant le vol. Ce document est créé lors de la préparation du vol et il est emmené en vol au même titre qu'une carte. Durant le vol, le pilote corrigera les informations en fonction de l'actualisation des paramètres.
-
Exemple de log de navigation complété.
-
Tracé exemple d'une navigation LFMX - Vinon - Gap sur une carte aéronautique au 1/500 000
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation aérienne est l'ensemble des techniques permettant à un pilote d'aéronef de maîtriser ses déplacements. La navigation permet à l'aéronef de suivre une trajectoire appelée route.
La navigation aérienne est largement héritière de la navigation maritime et la terminologie utilisée est identique.
Aux débuts de l'aviation, les navigations se faisaient à vue. En cas de conditions de visibilité dégradées, des phares aéronautiques jalonnaient certains tronçons de routes régulièrement empruntées, comme celle de l'Aéropostale qui amenaient le courrier de la France vers l'Afrique puis l’Amérique du Sud.
Au cours de la seconde moitié du XXe siècle, s’est développée la radionavigation. Au début du XXIe siècle, la navigation aérienne utilise largement le GPS.
Définitions
Le système solaire
Les variations saisonnières de la position du soleil sont créées par l'inclinaison de l'axe de rotation de la Terre par rapport au plan de son orbite autour du Soleil (écliptique). Pour un observateur terrestre, tout au long de l'année, le Soleil, bien que fixe, semble avoir une trajectoire différente dans le ciel. L'été est la saison où la journée dure le plus longtemps et le soleil monte le plus haut dans le ciel.
-
Alternance des saisons sur une année.
-
Mouvement apparent du soleil durant la journée pour un observateur situé dans l'hémisphère nord, en France
Se repérer sur la Terre
Afin de se repérer sur la sphère terrestre, la sphère est quadrillée par :
- Des Parallèles. Lorsqu'on se déplace vers le Nord ou le Sud (en restant sur le même méridien), on change de parallèle. Les Parallèles sont numérotés en degrés (0° étant l'équateur) plus une indication Nord ou Sud. le pôle Nord est numéroté 90°N. Paris se situe au niveau du parallèle 48,8°N. Il s'agit de la coordonnée de Latitude
- Des Méridiens. Lorsqu'on se déplace vers l'Ouest ou l'Est (en restant sur le même parallèle), on change de méridien. Les méridiens sont numérotés en degrés (0° étant le méridien passant par l'observatoire royal de Greenwich) plus une indication Ouest ou Est. Paris se situe au niveau du méridien 2,3°E. Il s'agit de la coordonnée de Longitude
-
Principaux parallèles, permettant de mesurer la Latitude et Principaux méridiens, permettant de mesurer la Longitude
Les coordonnées peuvent être exprimées de deux manières :
- Expression en degrés et décimale : La tour Eiffel à Paris se situe exactement aux coordonnées 48.8582N, 2.2945E
- Expression en degrés, minutes et secondes : parfois noté « DMS ». Chaque degré est divisé en 60minutes (1°=60'), puis chaque minute et divisé en 60secondes (1'=60"). La tour Eiffel se situe exactement aux coordonnées 48°51'29"N, 2°17'40"E
Les parallèles et les méridiens sont des arcs de cercles. Il est possible de les classer en 2 catégories :
- Ceux qui sont dit Grand cercles : l'arc de cercle à pour centre le centre de la terre, sont rayon est toujours égal à celui de la terre. Tous les méridiens sont des grand cercles. L'équateur est aussi un grand cercle.
- Ceux qui sont dit Petit cercles : tous les autres cercles n'ayant pas pour centre le centre de la terre. Mis a part l'équateur, tous les parallèles sont des petits cercles.
L'intérêt de cette classification est l'exploitation des Grands Cercles : leur périmètre est toujours égal au périmètre de la terre, c'est à dire environ 40 000km. Par exemple, tout déplacement de 0°01'00" en coordonnés le long d'un grand cercle fera toujours la même distance :
la longueur d'une minute d'arc (0°01'00") au niveau d'un grand cercle est la définition d'un Mille marin (nautique miles en anglais, noté NM). Cette astucieuse définition permet de calculer rapidement la distance qui sépare deux coordonnées. En ignorant les secondes d'arc, la distance entre la tour Eiffel (48°51'N, 2°17'E) et la tour de Pize (43°43'N, 10°23'E) est 05°08' sur l'axe Nord/Sud (soit 308NM).
Le temps
Le temps est une notion indispensable en navigation. Les divisions qui permettent de mesurer le temps sont faciles à appréhender et universelles : l'année, le jour, l'heure, la minute...etc. Le point de référence est beaucoup plus délicat car il en existe un certain nombre :
- LMT, Local Mean Time en anglais. C'est l'heure qui a pour référence le soleil. Lorsque le soleil est au zénith, la montre est réglée à 12h00. Cette référence dépend donc de la position géographique. Chaque endroit possède son heure LMT. Ce système est peu pratique et n'est quasiment plus utilisé aujourd'hui.
- Heures légales. Il s'agit d'une heure de référence pour un large territoire afin de résoudre les problèmes posés par l'heure LMT. Ce sont notamment les fuseaux horaires : la terre est décomposé en 24 fuseaux de 60minutes chacun qui possèdent tous leur propre heure légale de référence.
- UTC, Universal Time Coordinated en anglais. C'est une heure de référence mondiale, qui a pour référence le méridien d'origine 0°(Greenwich). A 12h UTC, le soleil est au zénith à Greenwich, mais il fait nuit dans l'Océan Pacifique. Les dénominations heure GMT] ou heure TU peuvent être considérées identique à l'heure UTC. Cette explication est en fait approximative mais suffisante pour le pilote planeur.
En aéronautique, les heures sont souvent définies en heure UTC car il est plus facile d’œuvrer avec une seule référence quelque soit le lieu ou le moment. Pour que le pilote puisse utiliser sa montre réglée en heure locale, il faudra ajouté l'écart entre l'heure UTC et son heure légale. En France, le décalage par rapport à l'heure UTC est : UTC+1 en hiver et UTC+2 en été.
La ligne de changement de date est une ligne imaginaire, à la surface de la Terre, approximativement située au 180e méridien (est et ouest) dans l'océan Pacifique ; son rôle est d'indiquer l'endroit où il est nécessaire de changer de date quand on la traverse. Les pilotes planeur européen sont peu concerné par cette notion.
Afin de définir les heures auxquelles la luminosité est suffisante pour entreprendre un vol VFR de jour, il est nécessaire de définir :
- le lever du soleil, SunRise en anglais (SR) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le matin.
- Le coucher du soleil, SunSet en anglais (SS) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le soir.
- le crépuscule civil : C'est la période où le centre du Soleil est situé à moins de 6° sous la ligne d'horizon.
La journée aéronautique durant laquelle le vol VFR de jour est possible commence au début du crépuscule avant le lever du soleil et se termine à la fin du crépuscule après le coucher du soleil. Aux latitudes moyennes (30 à 60°) cette définition est souvent simplifié, la journée aéronautique commence à SR-30min et se termine à SS+30min
Les directions
Afin de donner une direction, les points cardinaux sont utilisés. Pour un degré de précision plus important dans l'expression d'une direction, un angle est exprimé en prenant le Nord comme référence.
-
Rose des vents, indiquant les points cardinaux.
-
Rapporteur permettant d'exprimer une direction par un angle.
Les Distances
Les distances horizontales sont exprimées en Mille marin ou en kilomètres.
- Pour convertir rapidement des Nautiques Miles en kilomètres par calcul mental, une bonne approximation (erreur de 3%) est : prendre le double (x2), et retirer 1/10e.
Les distances verticales sont exprimées en Pied ou en Mètre.
- Pour convertir rapidement des Pieds en Mètres par calcul mental, une bonne approximation (erreur de 1.5%) est : multiplier par dix (x10), diviser par trois (/3).
- Pour convertir rapidement des Mètres en Pieds par calcul mental, une bonne approximation (erreur de 1.5%) est : diviser par dix (/10), multiplier par trois (x3).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Magnétisme et compas
Le compas est un instrument de bord permettant de mesurer la direction en utilisant le champ magnétique terrestre. Son fonctionnement est similaire à celui d'une boussole. C'est un instrument simple, mais les limitations de la mesure grâce au champ magnétique sont multiples :
- Le champ magnétique terrestre n'est pas aligné avec l'axe de rotation de la terre. Le compas indique les directions par rapport à la direction du pôle Nord magnétique, qui n'est pas au même endroit que le pôle Nord géographique. On dit que la différence entre les deux directions magnétiques et géographiques est la déclinaison magnétique.
-
Déclinaison magnétique. Le compas indique le pôle Nord magnétique.
- Le Nord magnétique bouge notablement en 6 à 12mois. La déclinaison doit être mise à jour régulièrement. Des cartes spécifiques présentent la déclinaison en fonction de chaque position sur terre. Les lignes qui joignent les endroits d'égale déclinaison sont appelées lignes isogones. En France et à notre époque, par chance, la déclinaison est négligeable (proche de 0°).
-
Évolution de la déclinaison entre 1590 et 1990 en fonction de la position sur la Terre, par représentation des lignes isogones. Cliquer pour voir l'animation.
-
Lignes d'égale déclinaisons magnétiques (les isogones) en France en 2020 (en orange clair). Service de l’Information Aéronautique - Données originales téléchargées sur https://www.sia.aviation-civile.gouv.fr, mise à jour du 26 mars 2020.
- Le compas est instrument imparfait. Il n'indique pas parfaitement le Nord magnétique. Ceci est dû au compas lui-même mais aussi à l'installation dans l'aéronef. On dit que cette erreur est la déviation. Cette erreur dépend de la direction qu'il indique. Une table de correction est disponible à proximité immédiate du compas.
-
Courbe de déviation en fonction des directions mesurées pour un compas maritime.
-
Le cap compas indiqué est de 45°. La déviation indiquée par la table (en rouge) est entre -2° et -5°. Le cap magnétique est donc de l'ordre de 42°.
Afin d'obtenir la vrai direction, les erreurs de déclinaison et déviation doivent être retirées par calcul :
-
Correction de la déviation et de la déclinaison après lecture du cap compas. Dans l'autre sens, procéder aux correction en inversant le signe.
Le compas mesure la direction du champ magnétique là où il se trouve. Tout éléments qui génère un champ magnétique peut l'influencer, il en résultera une indication de direction très erronée. Le pilote doit prendre les précautions nécessaires pour garantir la bonne indication du compas :
- un aimant placé à proximité d'un compas : des aimants sont présents dans les casques utilisé dans les aéronefs, les téléphones...
- les systèmes électriques de l'aéronef génèrent divers champs magnétiques dû à la circulation du courant électriques dans les câbles. Le fonctionnement de certaines servitudes électriques peut donc influencer le compas.
- les masses métalliques ferromagnétiques, même sans être des aimants, posent problèmes. Un stylo qui possède un corps métallique à proximité immédiate d'un compas rend son indication fausse.
Enfin, le compas indique une valeur correcte en ligne droite en l'absence de turbulence importante. Il ne faut pas prendre en compte l'indication d'un compas :
- lors d'un virage;
- lors de turbulences importantes.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Cartes
Une carte présente des informations en fonction de la position considérée. En aéronautique, ces informations concernent les repères visibles, les angles, les distances, les informations sur l'espace aérien...etc. Il est nécessaire d'appréhender les codes de conception et de lecture des cartes pour une utilisation correcte.
Le type de projection cartographique
La projection cartographique est un ensemble de techniques permettant de représenter une surface non plane (surface de la Terre, d'un autre corps céleste, du ciel, ...) dans son ensemble ou en partie sur la surface plane d'une carte. L'impossibilité de projeter le globe terrestre sur une surface plane sans distorsion explique que diverses projections aient été inventées, chacune ayant ses avantages :
- La projection de Mercator : C'est une projection cylindrique. Les méridiens et les parallèles sont des droites perpandiculaires qui quadrillent le plan. Cette projection conforme conserve les angles (ce qui permet de reporter directement sur la carte les angles mesurés au compas, et vice-versa) mais ne conserve ni les distances, ni les surfaces (l'échelle de la carte variant avec la latitude). Sauf le long de l'équateur. Une ligne droite sur une carte de Mercator ne représente pas la distance la plus courte en réalité. C'est en revanche une ligne d'azimut constant (c'est-à-dire une loxodromie), particulièrement utile pour naviguer à cap constant, même si le trajet ainsi défini n'est généralement pas sur un grand cercle et n'est donc pas le chemin le plus court.
-
Projection cylindrique projection Mercator.
-
Exemple de projection cylindrique avec déformation des distances importante au niveau des pôles.
- La projection conique conforme de Lambert : C'est une projection conique. Les méridiens sont des droites convergentes en un point, les parallèles sont des cercles concentriques autour de ce même point. Elle conserve également les angles. Elle conserve les distances sur le parallèle de référence. Il est donc particulièrement intéressant d'utiliser une projection de Lambert ayant son parallèle de référence sur la zone à exploiter. A proximité du parallèle de référence, une ligne droite sur une projection de Lambert représente la distance la plus courte en réalité (c'est-à-dire une orthodromie).
-
Projection conique type projection de Lambert.
-
Exemple de projection conique.
Les cartes utilisées par le pilote planeur
- La carte permet de représenter les éléments visibles au sol. En France, l'IGN fourni diverses cartes. Ces cartes sont par exemple disponibles en version numérique sur la plateforme Géoportail. L'expérience montre que pour un vol en planeur, une carte avec représentation schématique des éléments facilement identifiables en vol est la plus adaptée.
- La carte permet également de présenter sous forme graphique une partie des informations aéronautiques présentes dans les AIP (Aeronautical Information Publication en anglais) : aérodromes, espaces aériens, fréquences radio, systèmes de radionavigation...etc
Divers organismes proposent des cartes spécifiques à l'usage aéronautique pour différents besoins. En France, c'est principalement le SIA (Service de l'Information Aéronautique) qui éditer les cartes. En partant de la plus grande échelle, les cartes régulièrement utilisées pour le vol en planeur sont :
- La carte du SIA au 1/1 000 000ème : utilisée principalement pour de la radionavigation en route. Elle couvre l'espace du sol au FL195. Disponible en version numérique sur le site web du SIA
- La carte du SIA au 1/500 000ème : utilisée principalement pour de la navigation en route en vol à vue. Elle couvre l'espace du sol au FL115 (ou 3000ft ASFC, le plus élevé des deux). Disponible en version numérique sur Géoportail.
- Les cartes VAC (Visual Approach Chart en anglais) : Il s'agit d'une présentation de l'aérodrome dans son environnement. On y trouve une carte détaillée de l'aérodrome, le sens du tour de piste, ainsi que d'autres indications utiles pour y atterrir en vol à vue. Disponible en version nuémrique sur le site web du SIA
- D'autres types de cartes qui émanent d’initiatives privées ou associative pour répondre à un usage particulier.
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Carte VAC de Chalons Vatry. Source SIA
Les cartes aéronautiques sont réalisées selon un cahier des charges précis définie par l'annexe 4 de l'OACI. Cette annexe est disponible en lecture sur la librairie électronique de l'OACI. Les cartes sont mises à jour régulièrement, tous les 6 ou 12 mois.
La légende de la carte du SIA au 1/500 000ème (version 2021 disponible ici) est disponible sur Géoportail (icône "information de la couche > afficher la légende). Les symboles principaux doivent être connus du pilote de planeur. liste non-exhaustive :
- Aérodrome avec bande en herbe ou piste en dur
- Les chiffres simples sans décimales indiquent des altitudes
- Les chiffres entre parenthèses indiquent des hauteurs
- Les chiffres à trois décimales indiquent des fréquences VHF pour la radiocommunication
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Symboles détaillant les aérodromes
-
Symboles détaillant les villes et rappelant les règles de survol
Exploitation des cartes
De la carte à la réalité : Mesure de la direction et de la distance
- La direction se mesure grâce à un rapporteur. L'objectif est de mesurer l'angle que forme la route avec le méridien le plus proche. Une route à l'Est vaut 90°, au Sud 180°, à l'Ouest 270°. Une prudence particulière doit être prise pour ne pas confondre le sens de la route, ce qui occasionnerait une erreur de 180°.
- La distance se mesure grâce à une règle graduée entre deux points. En considérant que l'erreur d'échelle est négligeable (voir anomalies dû à la projection Lambert conique), il fait multiplier la distance mesurée par l'échelle de la carte afin d'obtenir la distance réelle.
-
Mesure de la direction d'une route entre Brienne et Vatry.
-
Mesure de la distance entre Brienne et Vatry par 2 méthodes. 1) 8.6cm x 500 000 = 43.5km. 2)utiliser un méridien comme règle gradué en y reportant la longueur : 00°24'00" = 24NM = 44.5km. L'écart de 1km est peu important.
De la réalité à la carte : Tracer un relèvement et un éloignement
- Un relèvement est la détermination de l'angle que fait, dans le plan horizontal, la ligne d'un observateur (le pilote) vers un objet avec celle d'une direction de référence fixe (le Nord géographique dans le cas le plus courant). Cette angle est mesuré en vol puis reporté sur la carte.
- Un éloignement est une distance déterminée en vol entre l'aéronef et un point géographique connu. Cette distance est ensuite reportée sur la carte.
Avec au minimum 2 relèvements, ou 1 relèvement et 1 éloignement, il est possible de connaître sa position sur une carte.
-
Tracé de 2 relèvements pour déterminer sa position (ces relèvements peuvent par exemple être transmit par le contrôle aérien de chacun des aérodromes par radiogoniométrie des émissions de l'aéronef).
-
Tracé d'un relèvement et d'un éloignement (provenant par exemple d'une estimation grâce au temps de vol et à la vitesse sol).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a trois méthodes de navigation :
Le cheminement
Cheminer consiste à utiliser les repères au sol caractéristiques et bien visibles depuis un aéronef. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps. On appelle aussi cheminement le fait de se diriger, à vue, de repères en repères situés à proximité l'un de l'autre.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
En vol, il est courant de confondre différents repères et ainsi avancer dans une mauvaise direction. A court terme, cela engendre une situation d’égarement. Pour garder une bonne conscience de la situation, le pilote doit évaluer le niveau de certitude de sa position :
- 1 à 2 repères = position peu sûre à conforter au plus vite,
- 3 à 4 repères = position fiable,
- 5 à 6 repères = position très fiable...
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct (une ligne droite) et que le cheminement n'est pas possible par manque de repères (ou des repères trop éloignés l'un de l'autre).
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères.
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon.
Pour naviguer à l'estime, les notions entre les différentes Vitesses sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées :
- La Vitesse Indiquée : En vol, l'indicateur de vitesse affiche la Vitesse Indiquée (VI ou IAS pour Indicated Air Speed en anglais). Cette indication n'est pas exacte.
- La Vitesse Conventionnelle : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument. Lorsque besoin, le manuel de vol explique la façon de déduire la Vc depuis la Vi (Vc ou CAS pour Calibrated Air Speed en anglais);
- La Vitesse Vrai : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou TAS pour True Air Speed en anglais);
- La Vitesse Propre : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp);
- La Vitesse équivalente : C'est la vitesse d'un aéronef, corrigée des effets de la compressibilité à l'altitude donnée (Ev ou EAS pour Equivalent Air Speed en anglais)
- La Vitesse sol : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou GS pour Ground Speed en anglais). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation).
-
Vent de face, la vitesse sol est plus faible.
-
Vent arrière, la vitesse sol est plus élevée.
-
les composantes d'un vent quelconque.
Pour naviguer à l'estime, il est nécessaire de connaître ces définitions :
- ETA : Estimated Time of Arrival en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé.
- la Route : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de Route vrai) ou par rapport au Nord magnétique (on parle de Route magnétique);
- le Cap : C'est la direction de la ligne de fois de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le cap compas), au Nord magnétique (le cap magnétique), ou au Nord vrai (le cap vrai).
- Le vent (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le vent effectif qui est la composante venant de face ou de l'arrière, et le vent de travers qui est la composante venant perpendiculairement à la trajectoire.
- la Dérive : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la correction de dérive ou angle de correction de dérive. En l'absence de vent de travers, le cap et la route sont identiques.
-
les composantes d'un vent quelconque.
-
La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive.
-
Après application d'un cap au vent pour créer un angle de correction de dérive.
Le computer de navigation
Un computer de navigation est une forme de règle à calcul circulaire utilisée dans l' aviation. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation.
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Durant le vol, le pilote navigue facilement grâce à la préparation menée au sol. Toutefois, il sera nécessaire d'évaluer et d'ajuster un certain nombre de paramètres, en croisière le pilote utilise des repères connus pour actualiser les éléments de navigation :
- Actualisation de la vitesse sol : Durant une ligne droite, il va être possible de déterminer sa vitesse sol réelle en fonction de la distance parcourue entre deux repères et le temps passé (chronomètre). Il est possible de corriger la vitesse sol estimée au départ.
- Actualisation de la vitesse et de la direction du vent : Grâce à la connaissance de la vitesse sol et de la dérive constatée en vol, le pilote peut en déduire la vitesse et la direction du vent (triangle des vitesse). Cet élément permet d'actualiser les corrections à apporter sur le prochain segment de navigation.
- Corrections de trajectoires : Si la route suivi n'est finalement pas la route escomptée, le pilote appliquera des corrections de trajectoire. Ces corrections permettent de revenir sur la route et sont plus ou moins forte suivant la nécessité de corriger l'écart rapidement (relief, espaces aériens, nécessité de se rapprocher d'un repère pour éviter l'égarement...)
- Révisions des ETA : L’ensemble des paramètres révisés permettent de conclure à une modification des ETA.
Pour la navigation à vue, et particulièrement la navigation à l'estime, le Journal de navigation ou Log de navigation est une technique de préparation des informations (au sol) et d'actualisation (en vol). Il s'agit d'un petit tableau regroupant les informations de navigation par ordre chronologique (points tournant, route magnétique, distance, carburant, ETA...etc). Bien que le format de base soit commun, chaque pilote peut y ajouter des informations qu'il souhaite retrouver facilement durant le vol. Ce document est créé lors de la préparation du vol et il est emmené en vol au même titre qu'une carte. Durant le vol, le pilote corrigera les informations en fonction de l'actualisation des paramètres.
-
Exemple de log de navigation complété.
-
Tracé exemple d'une navigation LFMX - Vinon - Gap sur une carte aéronautique au 1/500 000
Modèle en boucle détecté : 9-6 Le Service Information de Vol (motoplaneurs) Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Bases de la propagation des ondes radioélectrique
Aujourd'hui, beaucoup de systèmes fonctionnent avec des ondes radioélectriques comme le téléphone sans fil ou la télévision. En aéronautique, la possibilité de transmettre des informations grâce à des ondes radioélectriques est très utile comme par exemple pour communiquer oralement, donner des informations de direction, ou encore des informations de position...etc.
Afin d'exploiter correctement ces systèmes, et surtout d'en connaître les limitations respectives, il est nécessaire d'aborder brièvement leur fonctionnement.
Caractéristiques des Antennes : Les ondes électromagnétiques sont émises par des antennes. La forme et la taille de l'antenne peut être très différent suivant :
- La fréquence de l'onde électromagnétique utilisée : Pour un même type d'antenne, plus la fréquence est élevée et plus l'antenne est petite.
- La directivité de l'antenne : Une antenne peut émettre dans toutes les directions (utile en communication radio), ou alors seulement dans une direction particulière (utile pour un radar). Toutes les antennes connaissent des "angles morts" où elles n'émettent (ou ne reçoivent) pas du tout.
- La puissance de l'onde à émettre : Une antenne de forte puissance ou prévue pour capter de très faibles signaux est généralement plus grande.
-
Antenne pour la communication VHF (118 à 137 MHz)
AJOUTER PHOTO ANTENNE Flarm, Antenne GPS, Antenne transpondeur, Antenne VOR, antenne VDF
La Propagation des ondes : Suivant la fréquence de l'onde utilisée, la propagation des ondes radio est différente. Les concepteurs des systèmes aéronautiques choisissent la fréquence la plus adaptée au besoin du système. Les 3 types de propagation sont :
- les ondes de sol (0.03 à 0.3 MHz) : C'est lorsque l'onde se propage en suivant la courbure de la terre. Utile pour établir des communication mondiales, mais la puissance nécessaire est très importante.
- les ondes de ciel (1 à 30MHz) : C'est lorsque l'onde est capable d'être réfléchie par une couche de l'atmosphère (la ionosphère) et sur le sol, permettant par exemple d'établir des communications entre deux vallées encaissées et des communications mondiales avec plusieurs rebonds.
- les ondes directes (30MHz et plus) : C'est lorsque l'onde se propage en ligne droite, et sont arrêtées par les obstacles. C'est la portée optique. Pour établir une transmission entre un émetteur et un récepteur, il faut que ces derniers puisse se voir. Les montagnes peuvent empêcher la propagation (les bâtiments dans une moindre mesure), mais c'est surtout le fait que la terre soit ronde qui limite la portée optique. Dans le cas du franchissement de l’horizon, plus l'émetteur et le récepteur sont haut, et plus la portée optique est grande. Il est possible de calculer la portée optique avec l'altitude de l'aéronef (h) en mètre : . Il faut noter que cette formule ne prend en compte que les contraintes géométriques de la Terre. En tenant compte de l'atmosphère terrestre, la portée est légèrement plus grande.
-
La propagation par onde de sol sur la surface de la Terre.
-
La propagation par onde de ciel réfléchie entre ciel et terre.
-
La propagation par onde directe (portée optique).
La puissance de l'onde : La puissance émise par une antenne se propage et se répartie dans plusieurs directions. Au fur et à mesure que l'onde s'éloigne de son antenne, sa puissance émise se dilue sur une zone de plus en plus grande. Il est possible que pour un récepteur très éloigné, la puissance soit trop diluée (trop faible) et qu'aucun signal ne soit détecté. La portée est donc limitée par la puissance émise et par la sensibilité du récepteur. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Radiogoniométrie au sol Le principe est de déterminer la direction d'une émission radioélectrique. Au sol, ce principe est utilisé par les services de la Circulation Aérienne pour déterminer d'où provient l'onde radioélectrique de l'aéronef qui est en train de parler. Pour eux, c'est une aide importante pour comprendre la situation rapidement. Pour le pilote planeur, l'information de QDR (Relèvement magnétique en code Q) peut être obtenue sur simple demande par radio :
- Avec le QDR provenant de deux organismes de contrôles différents et une carte, il est possible d'obtenir sa position.
- Avec le QDR provenant d'un contrôleur d'aérodrome, il est possible de calculer une route pour prendre la direction de l'aérodrome (QDM en code Q). Le QDM est l’inverse du QDR (QDM = QDR +/-180°).
En France, tous les organismes de contrôle aérien disposent normalement d'un Radiogoniomètre. Dès qu'une communication radio est établie (portée optique), il est possible d'obtenir un QDR ou un QDM. Voici un exemple de demande à faire par radio :
- "Orléans info du motoplaneur F-CCUY, je suis égaré, pouvez vous me donner un QDR par rapport à l'aérodrome d'Orléans?"
- "F-CCUY de Orléans info, vous êtes dans le relèvement magnétique 145°"
- "Orléans info du F-CCUY, 145°, je vous remercie"
La précision des systèmes de radiogoniométrie moderne est bonne.
NDB/ADF (Radiocompas)
Le radiocompas est un système basé sur la radiogoniométrie. Des balises au sol placées aux points clefs des trajectoires des aéronefs émettent en permanence sur une fréquence comprise entre 190 et 1 750 kHz (en France, principalement entre 280 et 450 kHz). A bord de l'aéronef, un système de radiogoniométrie permet de mesurer l'angle entre la balise et l'axe longitudinal de l'aéronef.
- NDB : Non Directional Beacon en anglais, Balise Non Directionnelle en français. Il s'agit du nom de la balise au sol.
- ADF : Automatic Directional Finder en anglais, Radiocompas en français. Il s'agit du nom de l'instrument implanté à bord de l'aéronef.
La fréquence utilisée permet la propagation en onde de sol. La portée n'est donc pas limité par l'horizon. Seule la puissance émettrice de la balise limite la portée.
Limitations du système ADF : le signal est affecté par les conditions atmosphériques, les terrains montagneux, la réfraction côtière et les orages, notamment sur les longues distances.
Utilisation :
- Le pilote souhaite exploitée une balise indiquée par sa carte;
- Il entre la fréquence de la balise sur son radiocompas;
- Pour vérifier que la bonne balise est sélectionnée, il écoute le message en morse qu'émet la balise toute les 15 secondes (3 lettres indiquées sur la carte);
- Le radiocompas pointe en direction de la balise.
-
Antenne NDB "NKR" à Leimen-Ochsenbach, Allemagne
-
Le symbole du NDB sur une carte. la fréquence de la balise est 428KHz, CTX est son identifiant émit en morse
-
radiocompas
VOR
Un système VOR (VHF Omnidirectional Range en anglais) permet de déterminer un relèvement magnétique par rapport à une station au sol (balise émetteur VOR dont la position est connue), et donc le radial sur lequel l'aéronef est situé. Par déduction, il permet de suivre n'importe quelle route passant par la station (en rapprochement ou en éloignement de celle-ci), ou même de déterminer la position exacte de l'avion en utilisant deux balises VOR (intersection de radiaux) ou un DME (intersection d'un radial et d'un arc DME).
La station au sol utilise la gamme de fréquences VHF de 108 à 117,95 MHz (donc une portée optique). Plus intéressant que le radiocompas, le VOR est moins soumis aux perturbations extérieures, telles celle de l'ionosphère ou simplement les nuages.
L'indicateur à bord qui permet de lire les indications du VOR se nome OBI (Omnidirectional Bearing Indicator en anglais). Il est composé de plusieurs indicateurs :
- le FLAG qui permet de savoir si on reçoit ou non le signal de la station VOR
- un bouton OBS (Omnidirectional Bearing Selector) pour choisir le radial auquel on souhaite se comparer
- une aiguille de déviation qui indique le résultat de la comparaison : si on se trouve à droite, à gauche ou sur le radial choisi
- derrière l'aiguille, une échelle indique l'amplitude de l'écart. Chaque point représente un écart de 2° soit une indication de 10° max de chaque côté
- un indicateur TO / FROM qui permet de savoir si on est en situation de rapprochement ou d’éloignement de la station sol
Utilisation :
- Le pilote souhaite exploitée une balise VOR indiquée par sa carte;
- Il entre la fréquence de la balise sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise (3 lettres indiquées sur la carte);
- Si le pilote souhaite intercepter un radial donné, il choisi le radial souhaité avec le bouton OBS et l'intercepte lorsque l'aiguille de déviation n'indique plus d'écart
- Si le pilote souhaite connaître le radial sur lequel il se trouve, il tourne le bouton OBS jusqu'a ce que l'aiguille de déviation n'indique plus déviation. L'indicateut TO/FROM lui permet de lever le doute entre QDR et QDM.
-
Vue aérienne d'un ensemble d'antenne d'une balise VOR de Sprimont "SPI" en Belgique
-
Le symbole du VOR sur une carte. la fréquence de la balise est 110.2MHz, DVL est son identifiant émit en morse
-
Omnidirectional Bearing Indicator. L'aiguille de déviation est au centre (5 graduations de chaque côté). L'indicateur TO/FROM indique FROM. Le radial sélectionné est le 252°.
DME
Un système DME (Distance Measuring Equipment en anglais) permet de connaître la distance oblique qui sépare un aéronef d'une station au sol en mesurant le temps que met une impulsion radioélectrique pour faire un aller-retour.
- Une station sol DME est typiquement implantée avec un VOR. On parle alors de station sol VOR/DME.
- Le DME est fonctionnellement identique au composant distance du TACAN, c'est dire qu'un utilisateur de DME peut exploiter les stations sol TACAN.
- Une station sol DME basse puissance peut être implantée avec un ILS pour mesurer la distance par rapport au seuil de piste lors d'une finale sans visibilité.
La station au sol utilise la gamme de fréquences UHF de 962 à 1 213 MHz (donc une portée optique) qui sont appariées à celles des VOR et des ILS : c'est à dire que la fréquence du DME est automatiquement sélectionnée lorsque le pilote renseigne la fréquence du VOR ou le l'ILS. A noter que c'est la distance oblique qui est mesurée, donc si l'aéronef passe à la verticale de la station sol, le DME indiquera la hauteur de l'aéronef.
l'OACI préconise une précision minimum de ±(0,25 milles nautiques + 1,25 % de la distance). Une station sol peut gérer environ 100 aéronefs. Au delà, elle ignore les aéronefs les plus loin.
Utilisation :
- Le pilote souhaite exploitée une balise VOR/DME indiquée par sa carte;
- Il entre la fréquence de la balise VOR sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise un peu plus aigüe que le code du VOR (3 lettres indiquées sur la carte);
- La distance oblique s'affiche à l'écran quelques secondes plus tard.
- Si l'aéronef est très éloigné par rapport à une station sol, il sera dans les premiers à perdre l'information si la balise devient saturée.
-
Vue d'antenne DME seule.
-
Le symbole du VOR/DME sur une carte. la fréquence du VOR 116.7MHz doit être sélectionnée pour utiliser le DME appariée, MOU est son identifiant émit en morse
-
Afficheur DME. En exploitant la variation de la distance en fonction du temps, il peut indiquer une vitesse sol radiale, et le temps restant pour atteindre la balise.
Les Radars
Radar primaire au sol
Le radar (acronyme issu de l'anglais RAdio Detection And Ranging) est un système qui utilise les ondes électromagnétiques pour détecter la présence et déterminer la position des aéronefs. Les ondes envoyées par l'émetteur sont réfléchies par la cible, et les signaux de retour (appelés écho-radar) sont captés et analysés par le récepteur. La distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne. L'altitude ne peut pas être mesurée, bien que les systèmes modernes et plus élaborés parviennent à donner une indication d'altitude.
Ce principe de Radar ne nécessite aucun instrument à bord de l'aéronef et est appelé Radar primaire. La fréquence utilisée est choisie pour être réfléchies par les aéronefs sans être (trop) perturbée par les phénomènes météo. La portée est la portée optique. Les puissances émises sont très importantes car l'onde doit faire le voyage aller, être partiellement réfléchie par l'aéronef, et faire le voyage retour.
Généralement, le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), et proche de lui (impossibilité de recevoir le signal tant que l'antenne émet). Comme le système est à portée optique, un aéronef en basse altitude masqué par un relief n'est pas visible. Ce type de radar n'est pas forcement disponible par tous les centres de contrôles.
Utilisation :
- le radar balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les échos-radar s'affichent sur l'écran du contrôleur aérien, mais le système ne donne aucune information sur ces plots radar.
- classiquement, le radar primaire ne permet pas de connaître l'altitude de l'aéronef
-
Principe du radar primaire.
-
Antenne du radar primaire, dans un couple radar primaire + radar secondaire.
-
Type d'écran de radar primaire non filtré avec tous les échos-radar parasites.
Radar de surveillance secondaire
Le radar secondaire (ou SSR pour Secondary Surveillance RADAR en anglais), est un dispositif radar de contrôle aérien qui « interroge » les aéronefs équipés d'un transpondeurs qui sont à sa portée. Les transpondeurs interrogés répondent au radar en envoyant le code à 4 chiffre entré par le pilote (ce code est communiqué par le contrôle aérien par radio). Les réponses des avions sont captées et analysées par le récepteur. Comme pour le radar primaire, la distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne, et l'altitude ne peut pas être mesurée. L’intérêt du radar secondaire est que chaque plot radar est identifié par le code à 4 chiffres permettant au contrôle aérien d'identifier sans ambiguïté qui est qui.
Pour être visible du contrôle aérien, il est impératif d'avoir un transpondeur en fonctionnement à bord de l'aéronef. La fréquence utilisée est de 1030MHz (interrogations radar sol) et 1090MHz (réponse du transpondeur). La portée est la portée optique (donc un aéronef en basse altitude masqué par un relief n'est pas visible). Les puissances émises sont moins importantes qu'un radar primaire car l'onde ne doit faire que le voyage aller. Le voyage retour est fait l'onde émise par le transpondeur.
Le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), ou proche de lui (technologie de Suppression des Lobes Secondaires) mais la zone est généralement couverte par une antenne voisine. Il a été constaté qu'un planeur en spirale peut temporairement disparaitre des écrans radar.
Les technologies de radar secondaire ont évolué au fil du temps :
- Le mode A : Le mode le plus basique. Le transpondeur répond avec le code SSR composé de 4 chiffres de 0 à 7.
- Le mode C : Le transpondeur répond avec le code SSR + l'altitude pression à laquelle se trouve l'aéronef. Sur l'écran du contrôleur, le plot radar apparait avec le code et l'altitude, permettant une gestion fine de la circulation aérienne.
- Le mode S : Le transpondeur répond avec le code SSR + l'altitude + l'immatriculation + d'autres informations...Sur l'écran du contrôleur, le plot radar apparait avec l'immatriculation et l'altitude. Ce mode permet au contrôleur une meilleure réactivité et de donner le même code SSR à plusieurs aéronefs.
En France en 2020, le radar secondaire mode S est disponible dans une majorité de centres de contrôles.
Lors d'un vol sans service ATS, le pilote peut mettre un code de sa propre initiative afin de transmettre un message particulier :
| Liste des codes SSR à connaître | |
|---|---|
| Code | Signification |
| 7000 | Code à utiliser France en l'absence de d'ATS, pour transmettre sa position et améliorer la sécurité. Obligatoire, sauf pour les aéronefs à autonomie électrique limitée (planeurs pur, ballons...) |
| 7500 | Code pour signifier une intervention illicite (détournement...) |
| 7600 | Code pour signifier une panne des moyens de communication radio |
| 7700 | Code pour signifier une situation d'urgence ou d'interception |
Aussi, le système TCAS (implanté généralement à bord des aéronefs de tailles moyennes) interrogent les transpondeurs de tous les autres aéronefs dans un rayon de quelques dizaines de kilomètres. La position des autres aéronefs est connu, permettant de prévenir les collisions.
- le pilote affiche le code 7000, ou un code donné par l'ATS par radio.
- le radar secondaire balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les réponses des transpondeurs s'affichent sur l'écran du contrôleur aérien. En fonction du Mode (A, C ou S), plus ou moins d'informations apparaissent à côté du plot radar.
- Le contrôleur peut demander à un pilote de mettre Transpondeur IDENT. Le pilote doit appuyer sur le bouton IDENT.
- Le plot radar apparait alors en surbrillance pendant quelques minutes, pour aider l'identification par le contrôleur.
-
Antenne du radar secondaire, dans un couple radar primaire + radar secondaire.
-
transpondeur à bord. Code actif 7000 (en haut), mode A + C + S. Noter le bouton Ident en haut à droite.
-
Type d'écran de radar secondaire. Aéronef 1 : mode C, Alt. 700ft, 70kt. Aéronef 2 : mode S, alt. 2600ft, 70kt. Aéronef 3 : mode S, alt. 200ft, 100kt.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation par satellite est une technique de navigation basé sur système de positionnement par satellites.
Un système de positionnement par satellites (ou GNSS pour Global Navigation Satellite System en anglais) est un ensemble de composants reposant sur une constellation de satellites artificiels permettant de déterminer sa position 3D, sa vitesse 3D et l'heure grâce à un récepteur portable de petite taille. Cette catégorie de système de géopositionnement a pour avantage une précision de l'ordre de 5 à 15 mètres, une couverture quasi-mondiale. A l’inverse, le type d'onde utilisée rend le système sensible aux obstacles présents entre le terminal récepteur et les satellites (immeubles, montagnes...).
En plus de cet ensemble, certains systèmes d'augmentation et de fiabilisation permettent de fiabiliser le système et d'améliorer les performances à une précision de quelques mètres (DGPS, EGNOS, Assisted GPS...).
Mise en œuvre
Le système GPS (le système développé par les États-Unis) repose sur une constellation d'une trentaine de satellites qui permet à un utilisateur, situé sur n'importe quel point du globe, d'avoir toujours au minimum quatre satellites à portée (dans l'hypothèse d'un environnement dégagé d'obstacles dit « clear sky »). Le terminal de l'utilisateur calcule sa position grâce au signal émis par chacun des satellites. À ce stade, la communication est mono-directionnelle, c'est-à-dire que le terminal de l'utilisateur ne fait que recevoir les signaux.
| Informations disponibles sur le récepteur en fonction du nombre de satellites en vue | |
|---|---|
| 2 satellites | Date et heure |
| 3 satellites | Date et heure + position horizontale (latitude et longitude) |
| 4 satellites et + | Date et heure + position horizontale + position verticale (altitude) |
Avantages
- Le système GNSS permet de se positionner très rapidement directement sur une carte.
- De nombreuses fonctions des récepteurs permettent aussi de programmer la route suivie: dans la navigation aérienne sous forme de points tournants pour faciliter le travail du pilote.
- En planeur, le récepteur peut calculer des plans de finesses pour rejoindre les aérodromes proches.
Inconvénients
- Il faut être très attentif au « système de coordonnées » utilisé, et bien régler le récepteur afin qu'il fournisse les coordonnées dans le système de référence utilisé actuellement en aéronautique : Le système WGS 84.
- L'utilisation de cette technique nécessite la présence « d'électricité » à bord (panne du système si manque d'énergie à bord, particulièrement pour les planeurs)
Le système GPS des États-Unis était le premier en service. Depuis, ces systèmes sont disponibles :
-
Antenne d'un récepteur GNSS, environ 3cm de côté. Elle doit avoir une vue dégagée vers le ciel.
-
Coordonnées de Latitude et Longitude données par un récepteur GNSS d'ancienne génération (sans carte)
-
Récepteurs GNSS à bord d'un planeur avec affichage sur carte interactive (au centre).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Exercices
Ces documents sont disponibles afin de stimuler l'apprentissage par d'autres moyens que la simple lecture. Chacun est libre de les utiliser comme il l'entend: en autonomie, dans le cadre d'un devoir donné par un ATO/DTO, en TP lors de cours en DTO...etc. Wiki-SPL.net propose le contenu mais n'a pas vocation à répondre aux demandes d'aides à l'apprentissage. Ce rôle est assuré par les formateurs des ATO/DTO dont il faudra se rapprocher !
- Cahier d’exercices N°1 Document à imprimer. Prévoir un matériel basique (règle, crayon, rapporteur...).
Utilisation du Service d'Information de Vol
Le Service d'Information de Vol, souvent appelé SIV (traduit de Flight Information Service ou FIS en anglais) est un service apporté à tout aéronef évoluant dans une Région d'information de vol (traduit de Flight Information Region ou FIR en anglais). Une FIR s'étant du sol au FL195. A l'intérieur d'une FIR, le Service d'Information de Vol peut être rendu par différentes entités, suivant l'endroit où l'aéronef évolue :
- Lorsque l'aéronef évolue dans un espace aérien contrôlé (classe d'espace E, D, C, B, A), il est rendu par les services du contrôle.
- Lorsque l'aéronef évolue en classe d'espace G, il est rendu par un centre de service de la circulation aérienne proche.
Pour l'aviation générale en France, le Service d'Information de Vol est disponible durant tout le vol. Dans le cadre du Service d'Information de Vol, l'organisme (contacté par radio) peut transmettre des renseignements (règlementation SERA, article SERA.9005):
- sur la disponibilité des services de radionavigation;
- sur les modifications de l’état des aérodromes et des installations et services connexes, y compris des renseignements sur l’état des aires de mouvement lorsque leurs caractéristiques sont modifiées par la présence de neige, de glace ou d’une épaisseur significative d’eau;
- sur les conditions météorologiques observées ou prévues aux aérodromes de départ, de destination et de dégagement;
- sur les risques de collision;
- sur les renseignements disponibles sur la circulation et les conditions météorologiques le long de la route lorsque ces conditions sont susceptibles de rendre impossible la poursuite du vol selon les règles de vol à vue ;
- sur tout autre renseignement susceptible d’avoir une incidence sur la sécurité.
- Cette liste est réduite aux informations utiles au vol en planeur.
Dès que besoin, le pilote peut bénéficier du SIV en contactant le service adéquat par radio. C'est un service gratuit, permettant d'augmenter le niveau de sécurité.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation aérienne est l'ensemble des techniques permettant à un pilote d'aéronef de maîtriser ses déplacements. La navigation permet à l'aéronef de suivre une trajectoire appelée route.
La navigation aérienne est largement héritière de la navigation maritime et la terminologie utilisée est identique.
Aux débuts de l'aviation, les navigations se faisaient à vue. En cas de conditions de visibilité dégradées, des phares aéronautiques jalonnaient certains tronçons de routes régulièrement empruntées, comme celle de l'Aéropostale qui amenaient le courrier de la France vers l'Afrique puis l’Amérique du Sud.
Au cours de la seconde moitié du XXe siècle, s’est développée la radionavigation. Au début du XXIe siècle, la navigation aérienne utilise largement le GPS.
Définitions
Le système solaire
Les variations saisonnières de la position du soleil sont créées par l'inclinaison de l'axe de rotation de la Terre par rapport au plan de son orbite autour du Soleil (écliptique). Pour un observateur terrestre, tout au long de l'année, le Soleil, bien que fixe, semble avoir une trajectoire différente dans le ciel. L'été est la saison où la journée dure le plus longtemps et le soleil monte le plus haut dans le ciel.
-
Alternance des saisons sur une année.
-
Mouvement apparent du soleil durant la journée pour un observateur situé dans l'hémisphère nord, en France
Se repérer sur la Terre
Afin de se repérer sur la sphère terrestre, la sphère est quadrillée par :
- Des Parallèles. Lorsqu'on se déplace vers le Nord ou le Sud (en restant sur le même méridien), on change de parallèle. Les Parallèles sont numérotés en degrés (0° étant l'équateur) plus une indication Nord ou Sud. le pôle Nord est numéroté 90°N. Paris se situe au niveau du parallèle 48,8°N. Il s'agit de la coordonnée de Latitude
- Des Méridiens. Lorsqu'on se déplace vers l'Ouest ou l'Est (en restant sur le même parallèle), on change de méridien. Les méridiens sont numérotés en degrés (0° étant le méridien passant par l'observatoire royal de Greenwich) plus une indication Ouest ou Est. Paris se situe au niveau du méridien 2,3°E. Il s'agit de la coordonnée de Longitude
-
Principaux parallèles, permettant de mesurer la Latitude et Principaux méridiens, permettant de mesurer la Longitude
Les coordonnées peuvent être exprimées de deux manières :
- Expression en degrés et décimale : La tour Eiffel à Paris se situe exactement aux coordonnées 48.8582N, 2.2945E
- Expression en degrés, minutes et secondes : parfois noté « DMS ». Chaque degré est divisé en 60minutes (1°=60'), puis chaque minute et divisé en 60secondes (1'=60"). La tour Eiffel se situe exactement aux coordonnées 48°51'29"N, 2°17'40"E
Les parallèles et les méridiens sont des arcs de cercles. Il est possible de les classer en 2 catégories :
- Ceux qui sont dit Grand cercles : l'arc de cercle à pour centre le centre de la terre, sont rayon est toujours égal à celui de la terre. Tous les méridiens sont des grand cercles. L'équateur est aussi un grand cercle.
- Ceux qui sont dit Petit cercles : tous les autres cercles n'ayant pas pour centre le centre de la terre. Mis a part l'équateur, tous les parallèles sont des petits cercles.
L'intérêt de cette classification est l'exploitation des Grands Cercles : leur périmètre est toujours égal au périmètre de la terre, c'est à dire environ 40 000km. Par exemple, tout déplacement de 0°01'00" en coordonnés le long d'un grand cercle fera toujours la même distance :
la longueur d'une minute d'arc (0°01'00") au niveau d'un grand cercle est la définition d'un Mille marin (nautique miles en anglais, noté NM). Cette astucieuse définition permet de calculer rapidement la distance qui sépare deux coordonnées. En ignorant les secondes d'arc, la distance entre la tour Eiffel (48°51'N, 2°17'E) et la tour de Pize (43°43'N, 10°23'E) est 05°08' sur l'axe Nord/Sud (soit 308NM).
Le temps
Le temps est une notion indispensable en navigation. Les divisions qui permettent de mesurer le temps sont faciles à appréhender et universelles : l'année, le jour, l'heure, la minute...etc. Le point de référence est beaucoup plus délicat car il en existe un certain nombre :
- LMT, Local Mean Time en anglais. C'est l'heure qui a pour référence le soleil. Lorsque le soleil est au zénith, la montre est réglée à 12h00. Cette référence dépend donc de la position géographique. Chaque endroit possède son heure LMT. Ce système est peu pratique et n'est quasiment plus utilisé aujourd'hui.
- Heures légales. Il s'agit d'une heure de référence pour un large territoire afin de résoudre les problèmes posés par l'heure LMT. Ce sont notamment les fuseaux horaires : la terre est décomposé en 24 fuseaux de 60minutes chacun qui possèdent tous leur propre heure légale de référence.
- UTC, Universal Time Coordinated en anglais. C'est une heure de référence mondiale, qui a pour référence le méridien d'origine 0°(Greenwich). A 12h UTC, le soleil est au zénith à Greenwich, mais il fait nuit dans l'Océan Pacifique. Les dénominations heure GMT] ou heure TU peuvent être considérées identique à l'heure UTC. Cette explication est en fait approximative mais suffisante pour le pilote planeur.
En aéronautique, les heures sont souvent définies en heure UTC car il est plus facile d’œuvrer avec une seule référence quelque soit le lieu ou le moment. Pour que le pilote puisse utiliser sa montre réglée en heure locale, il faudra ajouté l'écart entre l'heure UTC et son heure légale. En France, le décalage par rapport à l'heure UTC est : UTC+1 en hiver et UTC+2 en été.
La ligne de changement de date est une ligne imaginaire, à la surface de la Terre, approximativement située au 180e méridien (est et ouest) dans l'océan Pacifique ; son rôle est d'indiquer l'endroit où il est nécessaire de changer de date quand on la traverse. Les pilotes planeur européen sont peu concerné par cette notion.
Afin de définir les heures auxquelles la luminosité est suffisante pour entreprendre un vol VFR de jour, il est nécessaire de définir :
- le lever du soleil, SunRise en anglais (SR) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le matin.
- Le coucher du soleil, SunSet en anglais (SS) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le soir.
- le crépuscule civil : C'est la période où le centre du Soleil est situé à moins de 6° sous la ligne d'horizon.
La journée aéronautique durant laquelle le vol VFR de jour est possible commence au début du crépuscule avant le lever du soleil et se termine à la fin du crépuscule après le coucher du soleil. Aux latitudes moyennes (30 à 60°) cette définition est souvent simplifié, la journée aéronautique commence à SR-30min et se termine à SS+30min
Les directions
Afin de donner une direction, les points cardinaux sont utilisés. Pour un degré de précision plus important dans l'expression d'une direction, un angle est exprimé en prenant le Nord comme référence.
-
Rose des vents, indiquant les points cardinaux.
-
Rapporteur permettant d'exprimer une direction par un angle.
Les Distances
Les distances horizontales sont exprimées en Mille marin ou en kilomètres.
- Pour convertir rapidement des Nautiques Miles en kilomètres par calcul mental, une bonne approximation (erreur de 3%) est : prendre le double (x2), et retirer 1/10e.
Les distances verticales sont exprimées en Pied ou en Mètre.
- Pour convertir rapidement des Pieds en Mètres par calcul mental, une bonne approximation (erreur de 1.5%) est : multiplier par dix (x10), diviser par trois (/3).
- Pour convertir rapidement des Mètres en Pieds par calcul mental, une bonne approximation (erreur de 1.5%) est : diviser par dix (/10), multiplier par trois (x3).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Magnétisme et compas
Le compas est un instrument de bord permettant de mesurer la direction en utilisant le champ magnétique terrestre. Son fonctionnement est similaire à celui d'une boussole. C'est un instrument simple, mais les limitations de la mesure grâce au champ magnétique sont multiples :
- Le champ magnétique terrestre n'est pas aligné avec l'axe de rotation de la terre. Le compas indique les directions par rapport à la direction du pôle Nord magnétique, qui n'est pas au même endroit que le pôle Nord géographique. On dit que la différence entre les deux directions magnétiques et géographiques est la déclinaison magnétique.
-
Déclinaison magnétique. Le compas indique le pôle Nord magnétique.
- Le Nord magnétique bouge notablement en 6 à 12mois. La déclinaison doit être mise à jour régulièrement. Des cartes spécifiques présentent la déclinaison en fonction de chaque position sur terre. Les lignes qui joignent les endroits d'égale déclinaison sont appelées lignes isogones. En France et à notre époque, par chance, la déclinaison est négligeable (proche de 0°).
-
Évolution de la déclinaison entre 1590 et 1990 en fonction de la position sur la Terre, par représentation des lignes isogones. Cliquer pour voir l'animation.
-
Lignes d'égale déclinaisons magnétiques (les isogones) en France en 2020 (en orange clair). Service de l’Information Aéronautique - Données originales téléchargées sur https://www.sia.aviation-civile.gouv.fr, mise à jour du 26 mars 2020.
- Le compas est instrument imparfait. Il n'indique pas parfaitement le Nord magnétique. Ceci est dû au compas lui-même mais aussi à l'installation dans l'aéronef. On dit que cette erreur est la déviation. Cette erreur dépend de la direction qu'il indique. Une table de correction est disponible à proximité immédiate du compas.
-
Courbe de déviation en fonction des directions mesurées pour un compas maritime.
-
Le cap compas indiqué est de 45°. La déviation indiquée par la table (en rouge) est entre -2° et -5°. Le cap magnétique est donc de l'ordre de 42°.
Afin d'obtenir la vrai direction, les erreurs de déclinaison et déviation doivent être retirées par calcul :
-
Correction de la déviation et de la déclinaison après lecture du cap compas. Dans l'autre sens, procéder aux correction en inversant le signe.
Le compas mesure la direction du champ magnétique là où il se trouve. Tout éléments qui génère un champ magnétique peut l'influencer, il en résultera une indication de direction très erronée. Le pilote doit prendre les précautions nécessaires pour garantir la bonne indication du compas :
- un aimant placé à proximité d'un compas : des aimants sont présents dans les casques utilisé dans les aéronefs, les téléphones...
- les systèmes électriques de l'aéronef génèrent divers champs magnétiques dû à la circulation du courant électriques dans les câbles. Le fonctionnement de certaines servitudes électriques peut donc influencer le compas.
- les masses métalliques ferromagnétiques, même sans être des aimants, posent problèmes. Un stylo qui possède un corps métallique à proximité immédiate d'un compas rend son indication fausse.
Enfin, le compas indique une valeur correcte en ligne droite en l'absence de turbulence importante. Il ne faut pas prendre en compte l'indication d'un compas :
- lors d'un virage;
- lors de turbulences importantes.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Cartes
Une carte présente des informations en fonction de la position considérée. En aéronautique, ces informations concernent les repères visibles, les angles, les distances, les informations sur l'espace aérien...etc. Il est nécessaire d'appréhender les codes de conception et de lecture des cartes pour une utilisation correcte.
Le type de projection cartographique
La projection cartographique est un ensemble de techniques permettant de représenter une surface non plane (surface de la Terre, d'un autre corps céleste, du ciel, ...) dans son ensemble ou en partie sur la surface plane d'une carte. L'impossibilité de projeter le globe terrestre sur une surface plane sans distorsion explique que diverses projections aient été inventées, chacune ayant ses avantages :
- La projection de Mercator : C'est une projection cylindrique. Les méridiens et les parallèles sont des droites perpandiculaires qui quadrillent le plan. Cette projection conforme conserve les angles (ce qui permet de reporter directement sur la carte les angles mesurés au compas, et vice-versa) mais ne conserve ni les distances, ni les surfaces (l'échelle de la carte variant avec la latitude). Sauf le long de l'équateur. Une ligne droite sur une carte de Mercator ne représente pas la distance la plus courte en réalité. C'est en revanche une ligne d'azimut constant (c'est-à-dire une loxodromie), particulièrement utile pour naviguer à cap constant, même si le trajet ainsi défini n'est généralement pas sur un grand cercle et n'est donc pas le chemin le plus court.
-
Projection cylindrique projection Mercator.
-
Exemple de projection cylindrique avec déformation des distances importante au niveau des pôles.
- La projection conique conforme de Lambert : C'est une projection conique. Les méridiens sont des droites convergentes en un point, les parallèles sont des cercles concentriques autour de ce même point. Elle conserve également les angles. Elle conserve les distances sur le parallèle de référence. Il est donc particulièrement intéressant d'utiliser une projection de Lambert ayant son parallèle de référence sur la zone à exploiter. A proximité du parallèle de référence, une ligne droite sur une projection de Lambert représente la distance la plus courte en réalité (c'est-à-dire une orthodromie).
-
Projection conique type projection de Lambert.
-
Exemple de projection conique.
Les cartes utilisées par le pilote planeur
- La carte permet de représenter les éléments visibles au sol. En France, l'IGN fourni diverses cartes. Ces cartes sont par exemple disponibles en version numérique sur la plateforme Géoportail. L'expérience montre que pour un vol en planeur, une carte avec représentation schématique des éléments facilement identifiables en vol est la plus adaptée.
- La carte permet également de présenter sous forme graphique une partie des informations aéronautiques présentes dans les AIP (Aeronautical Information Publication en anglais) : aérodromes, espaces aériens, fréquences radio, systèmes de radionavigation...etc
Divers organismes proposent des cartes spécifiques à l'usage aéronautique pour différents besoins. En France, c'est principalement le SIA (Service de l'Information Aéronautique) qui éditer les cartes. En partant de la plus grande échelle, les cartes régulièrement utilisées pour le vol en planeur sont :
- La carte du SIA au 1/1 000 000ème : utilisée principalement pour de la radionavigation en route. Elle couvre l'espace du sol au FL195. Disponible en version numérique sur le site web du SIA
- La carte du SIA au 1/500 000ème : utilisée principalement pour de la navigation en route en vol à vue. Elle couvre l'espace du sol au FL115 (ou 3000ft ASFC, le plus élevé des deux). Disponible en version numérique sur Géoportail.
- Les cartes VAC (Visual Approach Chart en anglais) : Il s'agit d'une présentation de l'aérodrome dans son environnement. On y trouve une carte détaillée de l'aérodrome, le sens du tour de piste, ainsi que d'autres indications utiles pour y atterrir en vol à vue. Disponible en version nuémrique sur le site web du SIA
- D'autres types de cartes qui émanent d’initiatives privées ou associative pour répondre à un usage particulier.
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Carte VAC de Chalons Vatry. Source SIA
Les cartes aéronautiques sont réalisées selon un cahier des charges précis définie par l'annexe 4 de l'OACI. Cette annexe est disponible en lecture sur la librairie électronique de l'OACI. Les cartes sont mises à jour régulièrement, tous les 6 ou 12 mois.
La légende de la carte du SIA au 1/500 000ème (version 2021 disponible ici) est disponible sur Géoportail (icône "information de la couche > afficher la légende). Les symboles principaux doivent être connus du pilote de planeur. liste non-exhaustive :
- Aérodrome avec bande en herbe ou piste en dur
- Les chiffres simples sans décimales indiquent des altitudes
- Les chiffres entre parenthèses indiquent des hauteurs
- Les chiffres à trois décimales indiquent des fréquences VHF pour la radiocommunication
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Symboles détaillant les aérodromes
-
Symboles détaillant les villes et rappelant les règles de survol
Exploitation des cartes
De la carte à la réalité : Mesure de la direction et de la distance
- La direction se mesure grâce à un rapporteur. L'objectif est de mesurer l'angle que forme la route avec le méridien le plus proche. Une route à l'Est vaut 90°, au Sud 180°, à l'Ouest 270°. Une prudence particulière doit être prise pour ne pas confondre le sens de la route, ce qui occasionnerait une erreur de 180°.
- La distance se mesure grâce à une règle graduée entre deux points. En considérant que l'erreur d'échelle est négligeable (voir anomalies dû à la projection Lambert conique), il fait multiplier la distance mesurée par l'échelle de la carte afin d'obtenir la distance réelle.
-
Mesure de la direction d'une route entre Brienne et Vatry.
-
Mesure de la distance entre Brienne et Vatry par 2 méthodes. 1) 8.6cm x 500 000 = 43.5km. 2)utiliser un méridien comme règle gradué en y reportant la longueur : 00°24'00" = 24NM = 44.5km. L'écart de 1km est peu important.
De la réalité à la carte : Tracer un relèvement et un éloignement
- Un relèvement est la détermination de l'angle que fait, dans le plan horizontal, la ligne d'un observateur (le pilote) vers un objet avec celle d'une direction de référence fixe (le Nord géographique dans le cas le plus courant). Cette angle est mesuré en vol puis reporté sur la carte.
- Un éloignement est une distance déterminée en vol entre l'aéronef et un point géographique connu. Cette distance est ensuite reportée sur la carte.
Avec au minimum 2 relèvements, ou 1 relèvement et 1 éloignement, il est possible de connaître sa position sur une carte.
-
Tracé de 2 relèvements pour déterminer sa position (ces relèvements peuvent par exemple être transmit par le contrôle aérien de chacun des aérodromes par radiogoniométrie des émissions de l'aéronef).
-
Tracé d'un relèvement et d'un éloignement (provenant par exemple d'une estimation grâce au temps de vol et à la vitesse sol).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a trois méthodes de navigation :
Le cheminement
Cheminer consiste à utiliser les repères au sol caractéristiques et bien visibles depuis un aéronef. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps. On appelle aussi cheminement le fait de se diriger, à vue, de repères en repères situés à proximité l'un de l'autre.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
En vol, il est courant de confondre différents repères et ainsi avancer dans une mauvaise direction. A court terme, cela engendre une situation d’égarement. Pour garder une bonne conscience de la situation, le pilote doit évaluer le niveau de certitude de sa position :
- 1 à 2 repères = position peu sûre à conforter au plus vite,
- 3 à 4 repères = position fiable,
- 5 à 6 repères = position très fiable...
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct (une ligne droite) et que le cheminement n'est pas possible par manque de repères (ou des repères trop éloignés l'un de l'autre).
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères.
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon.
Pour naviguer à l'estime, les notions entre les différentes Vitesses sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées :
- La Vitesse Indiquée : En vol, l'indicateur de vitesse affiche la Vitesse Indiquée (VI ou IAS pour Indicated Air Speed en anglais). Cette indication n'est pas exacte.
- La Vitesse Conventionnelle : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument. Lorsque besoin, le manuel de vol explique la façon de déduire la Vc depuis la Vi (Vc ou CAS pour Calibrated Air Speed en anglais);
- La Vitesse Vrai : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou TAS pour True Air Speed en anglais);
- La Vitesse Propre : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp);
- La Vitesse équivalente : C'est la vitesse d'un aéronef, corrigée des effets de la compressibilité à l'altitude donnée (Ev ou EAS pour Equivalent Air Speed en anglais)
- La Vitesse sol : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou GS pour Ground Speed en anglais). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation).
-
Vent de face, la vitesse sol est plus faible.
-
Vent arrière, la vitesse sol est plus élevée.
-
les composantes d'un vent quelconque.
Pour naviguer à l'estime, il est nécessaire de connaître ces définitions :
- ETA : Estimated Time of Arrival en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé.
- la Route : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de Route vrai) ou par rapport au Nord magnétique (on parle de Route magnétique);
- le Cap : C'est la direction de la ligne de fois de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le cap compas), au Nord magnétique (le cap magnétique), ou au Nord vrai (le cap vrai).
- Le vent (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le vent effectif qui est la composante venant de face ou de l'arrière, et le vent de travers qui est la composante venant perpendiculairement à la trajectoire.
- la Dérive : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la correction de dérive ou angle de correction de dérive. En l'absence de vent de travers, le cap et la route sont identiques.
-
les composantes d'un vent quelconque.
-
La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive.
-
Après application d'un cap au vent pour créer un angle de correction de dérive.
Le computer de navigation
Un computer de navigation est une forme de règle à calcul circulaire utilisée dans l' aviation. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation.
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Durant le vol, le pilote navigue facilement grâce à la préparation menée au sol. Toutefois, il sera nécessaire d'évaluer et d'ajuster un certain nombre de paramètres, en croisière le pilote utilise des repères connus pour actualiser les éléments de navigation :
- Actualisation de la vitesse sol : Durant une ligne droite, il va être possible de déterminer sa vitesse sol réelle en fonction de la distance parcourue entre deux repères et le temps passé (chronomètre). Il est possible de corriger la vitesse sol estimée au départ.
- Actualisation de la vitesse et de la direction du vent : Grâce à la connaissance de la vitesse sol et de la dérive constatée en vol, le pilote peut en déduire la vitesse et la direction du vent (triangle des vitesse). Cet élément permet d'actualiser les corrections à apporter sur le prochain segment de navigation.
- Corrections de trajectoires : Si la route suivi n'est finalement pas la route escomptée, le pilote appliquera des corrections de trajectoire. Ces corrections permettent de revenir sur la route et sont plus ou moins forte suivant la nécessité de corriger l'écart rapidement (relief, espaces aériens, nécessité de se rapprocher d'un repère pour éviter l'égarement...)
- Révisions des ETA : L’ensemble des paramètres révisés permettent de conclure à une modification des ETA.
Pour la navigation à vue, et particulièrement la navigation à l'estime, le Journal de navigation ou Log de navigation est une technique de préparation des informations (au sol) et d'actualisation (en vol). Il s'agit d'un petit tableau regroupant les informations de navigation par ordre chronologique (points tournant, route magnétique, distance, carburant, ETA...etc). Bien que le format de base soit commun, chaque pilote peut y ajouter des informations qu'il souhaite retrouver facilement durant le vol. Ce document est créé lors de la préparation du vol et il est emmené en vol au même titre qu'une carte. Durant le vol, le pilote corrigera les informations en fonction de l'actualisation des paramètres.
-
Exemple de log de navigation complété.
-
Tracé exemple d'une navigation LFMX - Vinon - Gap sur une carte aéronautique au 1/500 000
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Utilisation du Service d'Information de Vol
Le Service d'Information de Vol, souvent appelé SIV (traduit de Flight Information Service ou FIS en anglais) est un service apporté à tout aéronef évoluant dans une Région d'information de vol (traduit de Flight Information Region ou FIR en anglais). Une FIR s'étant du sol au FL195. A l'intérieur d'une FIR, le Service d'Information de Vol peut être rendu par différentes entités, suivant l'endroit où l'aéronef évolue :
- Lorsque l'aéronef évolue dans un espace aérien contrôlé (classe d'espace E, D, C, B, A), il est rendu par les services du contrôle.
- Lorsque l'aéronef évolue en classe d'espace G, il est rendu par un centre de service de la circulation aérienne proche.
Pour l'aviation générale en France, le Service d'Information de Vol est disponible durant tout le vol. Dans le cadre du Service d'Information de Vol, l'organisme (contacté par radio) peut transmettre des renseignements (règlementation SERA, article SERA.9005):
- sur la disponibilité des services de radionavigation;
- sur les modifications de l’état des aérodromes et des installations et services connexes, y compris des renseignements sur l’état des aires de mouvement lorsque leurs caractéristiques sont modifiées par la présence de neige, de glace ou d’une épaisseur significative d’eau;
- sur les conditions météorologiques observées ou prévues aux aérodromes de départ, de destination et de dégagement;
- sur les risques de collision;
- sur les renseignements disponibles sur la circulation et les conditions météorologiques le long de la route lorsque ces conditions sont susceptibles de rendre impossible la poursuite du vol selon les règles de vol à vue ;
- sur tout autre renseignement susceptible d’avoir une incidence sur la sécurité.
- Cette liste est réduite aux informations utiles au vol en planeur.
Dès que besoin, le pilote peut bénéficier du SIV en contactant le service adéquat par radio. C'est un service gratuit, permettant d'augmenter le niveau de sécurité.
Modèle en boucle détecté : 9-7 Propagation des ondes radio (motoplaneurs)
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Radiogoniométrie au sol Le principe est de déterminer la direction d'une émission radioélectrique. Au sol, ce principe est utilisé par les services de la Circulation Aérienne pour déterminer d'où provient l'onde radioélectrique de l'aéronef qui est en train de parler. Pour eux, c'est une aide importante pour comprendre la situation rapidement. Pour le pilote planeur, l'information de QDR (Relèvement magnétique en code Q) peut être obtenue sur simple demande par radio :
- Avec le QDR provenant de deux organismes de contrôles différents et une carte, il est possible d'obtenir sa position.
- Avec le QDR provenant d'un contrôleur d'aérodrome, il est possible de calculer une route pour prendre la direction de l'aérodrome (QDM en code Q). Le QDM est l’inverse du QDR (QDM = QDR +/-180°).
En France, tous les organismes de contrôle aérien disposent normalement d'un Radiogoniomètre. Dès qu'une communication radio est établie (portée optique), il est possible d'obtenir un QDR ou un QDM. Voici un exemple de demande à faire par radio :
- "Orléans info du motoplaneur F-CCUY, je suis égaré, pouvez vous me donner un QDR par rapport à l'aérodrome d'Orléans?"
- "F-CCUY de Orléans info, vous êtes dans le relèvement magnétique 145°"
- "Orléans info du F-CCUY, 145°, je vous remercie"
La précision des systèmes de radiogoniométrie moderne est bonne.
NDB/ADF (Radiocompas)
Le radiocompas est un système basé sur la radiogoniométrie. Des balises au sol placées aux points clefs des trajectoires des aéronefs émettent en permanence sur une fréquence comprise entre 190 et 1 750 kHz (en France, principalement entre 280 et 450 kHz). A bord de l'aéronef, un système de radiogoniométrie permet de mesurer l'angle entre la balise et l'axe longitudinal de l'aéronef.
- NDB : Non Directional Beacon en anglais, Balise Non Directionnelle en français. Il s'agit du nom de la balise au sol.
- ADF : Automatic Directional Finder en anglais, Radiocompas en français. Il s'agit du nom de l'instrument implanté à bord de l'aéronef.
La fréquence utilisée permet la propagation en onde de sol. La portée n'est donc pas limité par l'horizon. Seule la puissance émettrice de la balise limite la portée.
Limitations du système ADF : le signal est affecté par les conditions atmosphériques, les terrains montagneux, la réfraction côtière et les orages, notamment sur les longues distances.
Utilisation :
- Le pilote souhaite exploitée une balise indiquée par sa carte;
- Il entre la fréquence de la balise sur son radiocompas;
- Pour vérifier que la bonne balise est sélectionnée, il écoute le message en morse qu'émet la balise toute les 15 secondes (3 lettres indiquées sur la carte);
- Le radiocompas pointe en direction de la balise.
-
Antenne NDB "NKR" à Leimen-Ochsenbach, Allemagne
-
Le symbole du NDB sur une carte. la fréquence de la balise est 428KHz, CTX est son identifiant émit en morse
-
radiocompas
VOR
Un système VOR (VHF Omnidirectional Range en anglais) permet de déterminer un relèvement magnétique par rapport à une station au sol (balise émetteur VOR dont la position est connue), et donc le radial sur lequel l'aéronef est situé. Par déduction, il permet de suivre n'importe quelle route passant par la station (en rapprochement ou en éloignement de celle-ci), ou même de déterminer la position exacte de l'avion en utilisant deux balises VOR (intersection de radiaux) ou un DME (intersection d'un radial et d'un arc DME).
La station au sol utilise la gamme de fréquences VHF de 108 à 117,95 MHz (donc une portée optique). Plus intéressant que le radiocompas, le VOR est moins soumis aux perturbations extérieures, telles celle de l'ionosphère ou simplement les nuages.
L'indicateur à bord qui permet de lire les indications du VOR se nome OBI (Omnidirectional Bearing Indicator en anglais). Il est composé de plusieurs indicateurs :
- le FLAG qui permet de savoir si on reçoit ou non le signal de la station VOR
- un bouton OBS (Omnidirectional Bearing Selector) pour choisir le radial auquel on souhaite se comparer
- une aiguille de déviation qui indique le résultat de la comparaison : si on se trouve à droite, à gauche ou sur le radial choisi
- derrière l'aiguille, une échelle indique l'amplitude de l'écart. Chaque point représente un écart de 2° soit une indication de 10° max de chaque côté
- un indicateur TO / FROM qui permet de savoir si on est en situation de rapprochement ou d’éloignement de la station sol
Utilisation :
- Le pilote souhaite exploitée une balise VOR indiquée par sa carte;
- Il entre la fréquence de la balise sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise (3 lettres indiquées sur la carte);
- Si le pilote souhaite intercepter un radial donné, il choisi le radial souhaité avec le bouton OBS et l'intercepte lorsque l'aiguille de déviation n'indique plus d'écart
- Si le pilote souhaite connaître le radial sur lequel il se trouve, il tourne le bouton OBS jusqu'a ce que l'aiguille de déviation n'indique plus déviation. L'indicateut TO/FROM lui permet de lever le doute entre QDR et QDM.
-
Vue aérienne d'un ensemble d'antenne d'une balise VOR de Sprimont "SPI" en Belgique
-
Le symbole du VOR sur une carte. la fréquence de la balise est 110.2MHz, DVL est son identifiant émit en morse
-
Omnidirectional Bearing Indicator. L'aiguille de déviation est au centre (5 graduations de chaque côté). L'indicateur TO/FROM indique FROM. Le radial sélectionné est le 252°.
DME
Un système DME (Distance Measuring Equipment en anglais) permet de connaître la distance oblique qui sépare un aéronef d'une station au sol en mesurant le temps que met une impulsion radioélectrique pour faire un aller-retour.
- Une station sol DME est typiquement implantée avec un VOR. On parle alors de station sol VOR/DME.
- Le DME est fonctionnellement identique au composant distance du TACAN, c'est dire qu'un utilisateur de DME peut exploiter les stations sol TACAN.
- Une station sol DME basse puissance peut être implantée avec un ILS pour mesurer la distance par rapport au seuil de piste lors d'une finale sans visibilité.
La station au sol utilise la gamme de fréquences UHF de 962 à 1 213 MHz (donc une portée optique) qui sont appariées à celles des VOR et des ILS : c'est à dire que la fréquence du DME est automatiquement sélectionnée lorsque le pilote renseigne la fréquence du VOR ou le l'ILS. A noter que c'est la distance oblique qui est mesurée, donc si l'aéronef passe à la verticale de la station sol, le DME indiquera la hauteur de l'aéronef.
l'OACI préconise une précision minimum de ±(0,25 milles nautiques + 1,25 % de la distance). Une station sol peut gérer environ 100 aéronefs. Au delà, elle ignore les aéronefs les plus loin.
Utilisation :
- Le pilote souhaite exploitée une balise VOR/DME indiquée par sa carte;
- Il entre la fréquence de la balise VOR sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise un peu plus aigüe que le code du VOR (3 lettres indiquées sur la carte);
- La distance oblique s'affiche à l'écran quelques secondes plus tard.
- Si l'aéronef est très éloigné par rapport à une station sol, il sera dans les premiers à perdre l'information si la balise devient saturée.
-
Vue d'antenne DME seule.
-
Le symbole du VOR/DME sur une carte. la fréquence du VOR 116.7MHz doit être sélectionnée pour utiliser le DME appariée, MOU est son identifiant émit en morse
-
Afficheur DME. En exploitant la variation de la distance en fonction du temps, il peut indiquer une vitesse sol radiale, et le temps restant pour atteindre la balise.
Les Radars
Radar primaire au sol
Le radar (acronyme issu de l'anglais RAdio Detection And Ranging) est un système qui utilise les ondes électromagnétiques pour détecter la présence et déterminer la position des aéronefs. Les ondes envoyées par l'émetteur sont réfléchies par la cible, et les signaux de retour (appelés écho-radar) sont captés et analysés par le récepteur. La distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne. L'altitude ne peut pas être mesurée, bien que les systèmes modernes et plus élaborés parviennent à donner une indication d'altitude.
Ce principe de Radar ne nécessite aucun instrument à bord de l'aéronef et est appelé Radar primaire. La fréquence utilisée est choisie pour être réfléchies par les aéronefs sans être (trop) perturbée par les phénomènes météo. La portée est la portée optique. Les puissances émises sont très importantes car l'onde doit faire le voyage aller, être partiellement réfléchie par l'aéronef, et faire le voyage retour.
Généralement, le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), et proche de lui (impossibilité de recevoir le signal tant que l'antenne émet). Comme le système est à portée optique, un aéronef en basse altitude masqué par un relief n'est pas visible. Ce type de radar n'est pas forcement disponible par tous les centres de contrôles.
Utilisation :
- le radar balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les échos-radar s'affichent sur l'écran du contrôleur aérien, mais le système ne donne aucune information sur ces plots radar.
- classiquement, le radar primaire ne permet pas de connaître l'altitude de l'aéronef
-
Principe du radar primaire.
-
Antenne du radar primaire, dans un couple radar primaire + radar secondaire.
-
Type d'écran de radar primaire non filtré avec tous les échos-radar parasites.
Radar de surveillance secondaire
Le radar secondaire (ou SSR pour Secondary Surveillance RADAR en anglais), est un dispositif radar de contrôle aérien qui « interroge » les aéronefs équipés d'un transpondeurs qui sont à sa portée. Les transpondeurs interrogés répondent au radar en envoyant le code à 4 chiffre entré par le pilote (ce code est communiqué par le contrôle aérien par radio). Les réponses des avions sont captées et analysées par le récepteur. Comme pour le radar primaire, la distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne, et l'altitude ne peut pas être mesurée. L’intérêt du radar secondaire est que chaque plot radar est identifié par le code à 4 chiffres permettant au contrôle aérien d'identifier sans ambiguïté qui est qui.
Pour être visible du contrôle aérien, il est impératif d'avoir un transpondeur en fonctionnement à bord de l'aéronef. La fréquence utilisée est de 1030MHz (interrogations radar sol) et 1090MHz (réponse du transpondeur). La portée est la portée optique (donc un aéronef en basse altitude masqué par un relief n'est pas visible). Les puissances émises sont moins importantes qu'un radar primaire car l'onde ne doit faire que le voyage aller. Le voyage retour est fait l'onde émise par le transpondeur.
Le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), ou proche de lui (technologie de Suppression des Lobes Secondaires) mais la zone est généralement couverte par une antenne voisine. Il a été constaté qu'un planeur en spirale peut temporairement disparaitre des écrans radar.
Les technologies de radar secondaire ont évolué au fil du temps :
- Le mode A : Le mode le plus basique. Le transpondeur répond avec le code SSR composé de 4 chiffres de 0 à 7.
- Le mode C : Le transpondeur répond avec le code SSR + l'altitude pression à laquelle se trouve l'aéronef. Sur l'écran du contrôleur, le plot radar apparait avec le code et l'altitude, permettant une gestion fine de la circulation aérienne.
- Le mode S : Le transpondeur répond avec le code SSR + l'altitude + l'immatriculation + d'autres informations...Sur l'écran du contrôleur, le plot radar apparait avec l'immatriculation et l'altitude. Ce mode permet au contrôleur une meilleure réactivité et de donner le même code SSR à plusieurs aéronefs.
En France en 2020, le radar secondaire mode S est disponible dans une majorité de centres de contrôles.
Lors d'un vol sans service ATS, le pilote peut mettre un code de sa propre initiative afin de transmettre un message particulier :
| Liste des codes SSR à connaître | |
|---|---|
| Code | Signification |
| 7000 | Code à utiliser France en l'absence de d'ATS, pour transmettre sa position et améliorer la sécurité. Obligatoire, sauf pour les aéronefs à autonomie électrique limitée (planeurs pur, ballons...) |
| 7500 | Code pour signifier une intervention illicite (détournement...) |
| 7600 | Code pour signifier une panne des moyens de communication radio |
| 7700 | Code pour signifier une situation d'urgence ou d'interception |
Aussi, le système TCAS (implanté généralement à bord des aéronefs de tailles moyennes) interrogent les transpondeurs de tous les autres aéronefs dans un rayon de quelques dizaines de kilomètres. La position des autres aéronefs est connu, permettant de prévenir les collisions.
- le pilote affiche le code 7000, ou un code donné par l'ATS par radio.
- le radar secondaire balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les réponses des transpondeurs s'affichent sur l'écran du contrôleur aérien. En fonction du Mode (A, C ou S), plus ou moins d'informations apparaissent à côté du plot radar.
- Le contrôleur peut demander à un pilote de mettre Transpondeur IDENT. Le pilote doit appuyer sur le bouton IDENT.
- Le plot radar apparait alors en surbrillance pendant quelques minutes, pour aider l'identification par le contrôleur.
-
Antenne du radar secondaire, dans un couple radar primaire + radar secondaire.
-
transpondeur à bord. Code actif 7000 (en haut), mode A + C + S. Noter le bouton Ident en haut à droite.
-
Type d'écran de radar secondaire. Aéronef 1 : mode C, Alt. 700ft, 70kt. Aéronef 2 : mode S, alt. 2600ft, 70kt. Aéronef 3 : mode S, alt. 200ft, 100kt.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation par satellite est une technique de navigation basé sur système de positionnement par satellites.
Un système de positionnement par satellites (ou GNSS pour Global Navigation Satellite System en anglais) est un ensemble de composants reposant sur une constellation de satellites artificiels permettant de déterminer sa position 3D, sa vitesse 3D et l'heure grâce à un récepteur portable de petite taille. Cette catégorie de système de géopositionnement a pour avantage une précision de l'ordre de 5 à 15 mètres, une couverture quasi-mondiale. A l’inverse, le type d'onde utilisée rend le système sensible aux obstacles présents entre le terminal récepteur et les satellites (immeubles, montagnes...).
En plus de cet ensemble, certains systèmes d'augmentation et de fiabilisation permettent de fiabiliser le système et d'améliorer les performances à une précision de quelques mètres (DGPS, EGNOS, Assisted GPS...).
Mise en œuvre
Le système GPS (le système développé par les États-Unis) repose sur une constellation d'une trentaine de satellites qui permet à un utilisateur, situé sur n'importe quel point du globe, d'avoir toujours au minimum quatre satellites à portée (dans l'hypothèse d'un environnement dégagé d'obstacles dit « clear sky »). Le terminal de l'utilisateur calcule sa position grâce au signal émis par chacun des satellites. À ce stade, la communication est mono-directionnelle, c'est-à-dire que le terminal de l'utilisateur ne fait que recevoir les signaux.
| Informations disponibles sur le récepteur en fonction du nombre de satellites en vue | |
|---|---|
| 2 satellites | Date et heure |
| 3 satellites | Date et heure + position horizontale (latitude et longitude) |
| 4 satellites et + | Date et heure + position horizontale + position verticale (altitude) |
Avantages
- Le système GNSS permet de se positionner très rapidement directement sur une carte.
- De nombreuses fonctions des récepteurs permettent aussi de programmer la route suivie: dans la navigation aérienne sous forme de points tournants pour faciliter le travail du pilote.
- En planeur, le récepteur peut calculer des plans de finesses pour rejoindre les aérodromes proches.
Inconvénients
- Il faut être très attentif au « système de coordonnées » utilisé, et bien régler le récepteur afin qu'il fournisse les coordonnées dans le système de référence utilisé actuellement en aéronautique : Le système WGS 84.
- L'utilisation de cette technique nécessite la présence « d'électricité » à bord (panne du système si manque d'énergie à bord, particulièrement pour les planeurs)
Le système GPS des États-Unis était le premier en service. Depuis, ces systèmes sont disponibles :
-
Antenne d'un récepteur GNSS, environ 3cm de côté. Elle doit avoir une vue dégagée vers le ciel.
-
Coordonnées de Latitude et Longitude données par un récepteur GNSS d'ancienne génération (sans carte)
-
Récepteurs GNSS à bord d'un planeur avec affichage sur carte interactive (au centre).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Exercices
Ces documents sont disponibles afin de stimuler l'apprentissage par d'autres moyens que la simple lecture. Chacun est libre de les utiliser comme il l'entend: en autonomie, dans le cadre d'un devoir donné par un ATO/DTO, en TP lors de cours en DTO...etc. Wiki-SPL.net propose le contenu mais n'a pas vocation à répondre aux demandes d'aides à l'apprentissage. Ce rôle est assuré par les formateurs des ATO/DTO dont il faudra se rapprocher !
- Cahier d’exercices N°1 Document à imprimer. Prévoir un matériel basique (règle, crayon, rapporteur...).
Bases de la propagation des ondes radioélectrique
Aujourd'hui, beaucoup de systèmes fonctionnent avec des ondes radioélectriques comme le téléphone sans fil ou la télévision. En aéronautique, la possibilité de transmettre des informations grâce à des ondes radioélectriques est très utile comme par exemple pour communiquer oralement, donner des informations de direction, ou encore des informations de position...etc.
Afin d'exploiter correctement ces systèmes, et surtout d'en connaître les limitations respectives, il est nécessaire d'aborder brièvement leur fonctionnement.
Caractéristiques des Antennes : Les ondes électromagnétiques sont émises par des antennes. La forme et la taille de l'antenne peut être très différent suivant :
- La fréquence de l'onde électromagnétique utilisée : Pour un même type d'antenne, plus la fréquence est élevée et plus l'antenne est petite.
- La directivité de l'antenne : Une antenne peut émettre dans toutes les directions (utile en communication radio), ou alors seulement dans une direction particulière (utile pour un radar). Toutes les antennes connaissent des "angles morts" où elles n'émettent (ou ne reçoivent) pas du tout.
- La puissance de l'onde à émettre : Une antenne de forte puissance ou prévue pour capter de très faibles signaux est généralement plus grande.
-
Antenne pour la communication VHF (118 à 137 MHz)
AJOUTER PHOTO ANTENNE Flarm, Antenne GPS, Antenne transpondeur, Antenne VOR, antenne VDF
La Propagation des ondes : Suivant la fréquence de l'onde utilisée, la propagation des ondes radio est différente. Les concepteurs des systèmes aéronautiques choisissent la fréquence la plus adaptée au besoin du système. Les 3 types de propagation sont :
- les ondes de sol (0.03 à 0.3 MHz) : C'est lorsque l'onde se propage en suivant la courbure de la terre. Utile pour établir des communication mondiales, mais la puissance nécessaire est très importante.
- les ondes de ciel (1 à 30MHz) : C'est lorsque l'onde est capable d'être réfléchie par une couche de l'atmosphère (la ionosphère) et sur le sol, permettant par exemple d'établir des communications entre deux vallées encaissées et des communications mondiales avec plusieurs rebonds.
- les ondes directes (30MHz et plus) : C'est lorsque l'onde se propage en ligne droite, et sont arrêtées par les obstacles. C'est la portée optique. Pour établir une transmission entre un émetteur et un récepteur, il faut que ces derniers puisse se voir. Les montagnes peuvent empêcher la propagation (les bâtiments dans une moindre mesure), mais c'est surtout le fait que la terre soit ronde qui limite la portée optique. Dans le cas du franchissement de l’horizon, plus l'émetteur et le récepteur sont haut, et plus la portée optique est grande. Il est possible de calculer la portée optique avec l'altitude de l'aéronef (h) en mètre : . Il faut noter que cette formule ne prend en compte que les contraintes géométriques de la Terre. En tenant compte de l'atmosphère terrestre, la portée est légèrement plus grande.
-
La propagation par onde de sol sur la surface de la Terre.
-
La propagation par onde de ciel réfléchie entre ciel et terre.
-
La propagation par onde directe (portée optique).
La puissance de l'onde : La puissance émise par une antenne se propage et se répartie dans plusieurs directions. Au fur et à mesure que l'onde s'éloigne de son antenne, sa puissance émise se dilue sur une zone de plus en plus grande. Il est possible que pour un récepteur très éloigné, la puissance soit trop diluée (trop faible) et qu'aucun signal ne soit détecté. La portée est donc limitée par la puissance émise et par la sensibilité du récepteur.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation aérienne est l'ensemble des techniques permettant à un pilote d'aéronef de maîtriser ses déplacements. La navigation permet à l'aéronef de suivre une trajectoire appelée route.
La navigation aérienne est largement héritière de la navigation maritime et la terminologie utilisée est identique.
Aux débuts de l'aviation, les navigations se faisaient à vue. En cas de conditions de visibilité dégradées, des phares aéronautiques jalonnaient certains tronçons de routes régulièrement empruntées, comme celle de l'Aéropostale qui amenaient le courrier de la France vers l'Afrique puis l’Amérique du Sud.
Au cours de la seconde moitié du XXe siècle, s’est développée la radionavigation. Au début du XXIe siècle, la navigation aérienne utilise largement le GPS.
Définitions
Le système solaire
Les variations saisonnières de la position du soleil sont créées par l'inclinaison de l'axe de rotation de la Terre par rapport au plan de son orbite autour du Soleil (écliptique). Pour un observateur terrestre, tout au long de l'année, le Soleil, bien que fixe, semble avoir une trajectoire différente dans le ciel. L'été est la saison où la journée dure le plus longtemps et le soleil monte le plus haut dans le ciel.
-
Alternance des saisons sur une année.
-
Mouvement apparent du soleil durant la journée pour un observateur situé dans l'hémisphère nord, en France
Se repérer sur la Terre
Afin de se repérer sur la sphère terrestre, la sphère est quadrillée par :
- Des Parallèles. Lorsqu'on se déplace vers le Nord ou le Sud (en restant sur le même méridien), on change de parallèle. Les Parallèles sont numérotés en degrés (0° étant l'équateur) plus une indication Nord ou Sud. le pôle Nord est numéroté 90°N. Paris se situe au niveau du parallèle 48,8°N. Il s'agit de la coordonnée de Latitude
- Des Méridiens. Lorsqu'on se déplace vers l'Ouest ou l'Est (en restant sur le même parallèle), on change de méridien. Les méridiens sont numérotés en degrés (0° étant le méridien passant par l'observatoire royal de Greenwich) plus une indication Ouest ou Est. Paris se situe au niveau du méridien 2,3°E. Il s'agit de la coordonnée de Longitude
-
Principaux parallèles, permettant de mesurer la Latitude et Principaux méridiens, permettant de mesurer la Longitude
Les coordonnées peuvent être exprimées de deux manières :
- Expression en degrés et décimale : La tour Eiffel à Paris se situe exactement aux coordonnées 48.8582N, 2.2945E
- Expression en degrés, minutes et secondes : parfois noté « DMS ». Chaque degré est divisé en 60minutes (1°=60'), puis chaque minute et divisé en 60secondes (1'=60"). La tour Eiffel se situe exactement aux coordonnées 48°51'29"N, 2°17'40"E
Les parallèles et les méridiens sont des arcs de cercles. Il est possible de les classer en 2 catégories :
- Ceux qui sont dit Grand cercles : l'arc de cercle à pour centre le centre de la terre, sont rayon est toujours égal à celui de la terre. Tous les méridiens sont des grand cercles. L'équateur est aussi un grand cercle.
- Ceux qui sont dit Petit cercles : tous les autres cercles n'ayant pas pour centre le centre de la terre. Mis a part l'équateur, tous les parallèles sont des petits cercles.
L'intérêt de cette classification est l'exploitation des Grands Cercles : leur périmètre est toujours égal au périmètre de la terre, c'est à dire environ 40 000km. Par exemple, tout déplacement de 0°01'00" en coordonnés le long d'un grand cercle fera toujours la même distance :
la longueur d'une minute d'arc (0°01'00") au niveau d'un grand cercle est la définition d'un Mille marin (nautique miles en anglais, noté NM). Cette astucieuse définition permet de calculer rapidement la distance qui sépare deux coordonnées. En ignorant les secondes d'arc, la distance entre la tour Eiffel (48°51'N, 2°17'E) et la tour de Pize (43°43'N, 10°23'E) est 05°08' sur l'axe Nord/Sud (soit 308NM).
Le temps
Le temps est une notion indispensable en navigation. Les divisions qui permettent de mesurer le temps sont faciles à appréhender et universelles : l'année, le jour, l'heure, la minute...etc. Le point de référence est beaucoup plus délicat car il en existe un certain nombre :
- LMT, Local Mean Time en anglais. C'est l'heure qui a pour référence le soleil. Lorsque le soleil est au zénith, la montre est réglée à 12h00. Cette référence dépend donc de la position géographique. Chaque endroit possède son heure LMT. Ce système est peu pratique et n'est quasiment plus utilisé aujourd'hui.
- Heures légales. Il s'agit d'une heure de référence pour un large territoire afin de résoudre les problèmes posés par l'heure LMT. Ce sont notamment les fuseaux horaires : la terre est décomposé en 24 fuseaux de 60minutes chacun qui possèdent tous leur propre heure légale de référence.
- UTC, Universal Time Coordinated en anglais. C'est une heure de référence mondiale, qui a pour référence le méridien d'origine 0°(Greenwich). A 12h UTC, le soleil est au zénith à Greenwich, mais il fait nuit dans l'Océan Pacifique. Les dénominations heure GMT] ou heure TU peuvent être considérées identique à l'heure UTC. Cette explication est en fait approximative mais suffisante pour le pilote planeur.
En aéronautique, les heures sont souvent définies en heure UTC car il est plus facile d’œuvrer avec une seule référence quelque soit le lieu ou le moment. Pour que le pilote puisse utiliser sa montre réglée en heure locale, il faudra ajouté l'écart entre l'heure UTC et son heure légale. En France, le décalage par rapport à l'heure UTC est : UTC+1 en hiver et UTC+2 en été.
La ligne de changement de date est une ligne imaginaire, à la surface de la Terre, approximativement située au 180e méridien (est et ouest) dans l'océan Pacifique ; son rôle est d'indiquer l'endroit où il est nécessaire de changer de date quand on la traverse. Les pilotes planeur européen sont peu concerné par cette notion.
Afin de définir les heures auxquelles la luminosité est suffisante pour entreprendre un vol VFR de jour, il est nécessaire de définir :
- le lever du soleil, SunRise en anglais (SR) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le matin.
- Le coucher du soleil, SunSet en anglais (SS) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le soir.
- le crépuscule civil : C'est la période où le centre du Soleil est situé à moins de 6° sous la ligne d'horizon.
La journée aéronautique durant laquelle le vol VFR de jour est possible commence au début du crépuscule avant le lever du soleil et se termine à la fin du crépuscule après le coucher du soleil. Aux latitudes moyennes (30 à 60°) cette définition est souvent simplifié, la journée aéronautique commence à SR-30min et se termine à SS+30min
Les directions
Afin de donner une direction, les points cardinaux sont utilisés. Pour un degré de précision plus important dans l'expression d'une direction, un angle est exprimé en prenant le Nord comme référence.
-
Rose des vents, indiquant les points cardinaux.
-
Rapporteur permettant d'exprimer une direction par un angle.
Les Distances
Les distances horizontales sont exprimées en Mille marin ou en kilomètres.
- Pour convertir rapidement des Nautiques Miles en kilomètres par calcul mental, une bonne approximation (erreur de 3%) est : prendre le double (x2), et retirer 1/10e.
Les distances verticales sont exprimées en Pied ou en Mètre.
- Pour convertir rapidement des Pieds en Mètres par calcul mental, une bonne approximation (erreur de 1.5%) est : multiplier par dix (x10), diviser par trois (/3).
- Pour convertir rapidement des Mètres en Pieds par calcul mental, une bonne approximation (erreur de 1.5%) est : diviser par dix (/10), multiplier par trois (x3).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Magnétisme et compas
Le compas est un instrument de bord permettant de mesurer la direction en utilisant le champ magnétique terrestre. Son fonctionnement est similaire à celui d'une boussole. C'est un instrument simple, mais les limitations de la mesure grâce au champ magnétique sont multiples :
- Le champ magnétique terrestre n'est pas aligné avec l'axe de rotation de la terre. Le compas indique les directions par rapport à la direction du pôle Nord magnétique, qui n'est pas au même endroit que le pôle Nord géographique. On dit que la différence entre les deux directions magnétiques et géographiques est la déclinaison magnétique.
-
Déclinaison magnétique. Le compas indique le pôle Nord magnétique.
- Le Nord magnétique bouge notablement en 6 à 12mois. La déclinaison doit être mise à jour régulièrement. Des cartes spécifiques présentent la déclinaison en fonction de chaque position sur terre. Les lignes qui joignent les endroits d'égale déclinaison sont appelées lignes isogones. En France et à notre époque, par chance, la déclinaison est négligeable (proche de 0°).
-
Évolution de la déclinaison entre 1590 et 1990 en fonction de la position sur la Terre, par représentation des lignes isogones. Cliquer pour voir l'animation.
-
Lignes d'égale déclinaisons magnétiques (les isogones) en France en 2020 (en orange clair). Service de l’Information Aéronautique - Données originales téléchargées sur https://www.sia.aviation-civile.gouv.fr, mise à jour du 26 mars 2020.
- Le compas est instrument imparfait. Il n'indique pas parfaitement le Nord magnétique. Ceci est dû au compas lui-même mais aussi à l'installation dans l'aéronef. On dit que cette erreur est la déviation. Cette erreur dépend de la direction qu'il indique. Une table de correction est disponible à proximité immédiate du compas.
-
Courbe de déviation en fonction des directions mesurées pour un compas maritime.
-
Le cap compas indiqué est de 45°. La déviation indiquée par la table (en rouge) est entre -2° et -5°. Le cap magnétique est donc de l'ordre de 42°.
Afin d'obtenir la vrai direction, les erreurs de déclinaison et déviation doivent être retirées par calcul :
-
Correction de la déviation et de la déclinaison après lecture du cap compas. Dans l'autre sens, procéder aux correction en inversant le signe.
Le compas mesure la direction du champ magnétique là où il se trouve. Tout éléments qui génère un champ magnétique peut l'influencer, il en résultera une indication de direction très erronée. Le pilote doit prendre les précautions nécessaires pour garantir la bonne indication du compas :
- un aimant placé à proximité d'un compas : des aimants sont présents dans les casques utilisé dans les aéronefs, les téléphones...
- les systèmes électriques de l'aéronef génèrent divers champs magnétiques dû à la circulation du courant électriques dans les câbles. Le fonctionnement de certaines servitudes électriques peut donc influencer le compas.
- les masses métalliques ferromagnétiques, même sans être des aimants, posent problèmes. Un stylo qui possède un corps métallique à proximité immédiate d'un compas rend son indication fausse.
Enfin, le compas indique une valeur correcte en ligne droite en l'absence de turbulence importante. Il ne faut pas prendre en compte l'indication d'un compas :
- lors d'un virage;
- lors de turbulences importantes.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Cartes
Une carte présente des informations en fonction de la position considérée. En aéronautique, ces informations concernent les repères visibles, les angles, les distances, les informations sur l'espace aérien...etc. Il est nécessaire d'appréhender les codes de conception et de lecture des cartes pour une utilisation correcte.
Le type de projection cartographique
La projection cartographique est un ensemble de techniques permettant de représenter une surface non plane (surface de la Terre, d'un autre corps céleste, du ciel, ...) dans son ensemble ou en partie sur la surface plane d'une carte. L'impossibilité de projeter le globe terrestre sur une surface plane sans distorsion explique que diverses projections aient été inventées, chacune ayant ses avantages :
- La projection de Mercator : C'est une projection cylindrique. Les méridiens et les parallèles sont des droites perpandiculaires qui quadrillent le plan. Cette projection conforme conserve les angles (ce qui permet de reporter directement sur la carte les angles mesurés au compas, et vice-versa) mais ne conserve ni les distances, ni les surfaces (l'échelle de la carte variant avec la latitude). Sauf le long de l'équateur. Une ligne droite sur une carte de Mercator ne représente pas la distance la plus courte en réalité. C'est en revanche une ligne d'azimut constant (c'est-à-dire une loxodromie), particulièrement utile pour naviguer à cap constant, même si le trajet ainsi défini n'est généralement pas sur un grand cercle et n'est donc pas le chemin le plus court.
-
Projection cylindrique projection Mercator.
-
Exemple de projection cylindrique avec déformation des distances importante au niveau des pôles.
- La projection conique conforme de Lambert : C'est une projection conique. Les méridiens sont des droites convergentes en un point, les parallèles sont des cercles concentriques autour de ce même point. Elle conserve également les angles. Elle conserve les distances sur le parallèle de référence. Il est donc particulièrement intéressant d'utiliser une projection de Lambert ayant son parallèle de référence sur la zone à exploiter. A proximité du parallèle de référence, une ligne droite sur une projection de Lambert représente la distance la plus courte en réalité (c'est-à-dire une orthodromie).
-
Projection conique type projection de Lambert.
-
Exemple de projection conique.
Les cartes utilisées par le pilote planeur
- La carte permet de représenter les éléments visibles au sol. En France, l'IGN fourni diverses cartes. Ces cartes sont par exemple disponibles en version numérique sur la plateforme Géoportail. L'expérience montre que pour un vol en planeur, une carte avec représentation schématique des éléments facilement identifiables en vol est la plus adaptée.
- La carte permet également de présenter sous forme graphique une partie des informations aéronautiques présentes dans les AIP (Aeronautical Information Publication en anglais) : aérodromes, espaces aériens, fréquences radio, systèmes de radionavigation...etc
Divers organismes proposent des cartes spécifiques à l'usage aéronautique pour différents besoins. En France, c'est principalement le SIA (Service de l'Information Aéronautique) qui éditer les cartes. En partant de la plus grande échelle, les cartes régulièrement utilisées pour le vol en planeur sont :
- La carte du SIA au 1/1 000 000ème : utilisée principalement pour de la radionavigation en route. Elle couvre l'espace du sol au FL195. Disponible en version numérique sur le site web du SIA
- La carte du SIA au 1/500 000ème : utilisée principalement pour de la navigation en route en vol à vue. Elle couvre l'espace du sol au FL115 (ou 3000ft ASFC, le plus élevé des deux). Disponible en version numérique sur Géoportail.
- Les cartes VAC (Visual Approach Chart en anglais) : Il s'agit d'une présentation de l'aérodrome dans son environnement. On y trouve une carte détaillée de l'aérodrome, le sens du tour de piste, ainsi que d'autres indications utiles pour y atterrir en vol à vue. Disponible en version nuémrique sur le site web du SIA
- D'autres types de cartes qui émanent d’initiatives privées ou associative pour répondre à un usage particulier.
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Carte VAC de Chalons Vatry. Source SIA
Les cartes aéronautiques sont réalisées selon un cahier des charges précis définie par l'annexe 4 de l'OACI. Cette annexe est disponible en lecture sur la librairie électronique de l'OACI. Les cartes sont mises à jour régulièrement, tous les 6 ou 12 mois.
La légende de la carte du SIA au 1/500 000ème (version 2021 disponible ici) est disponible sur Géoportail (icône "information de la couche > afficher la légende). Les symboles principaux doivent être connus du pilote de planeur. liste non-exhaustive :
- Aérodrome avec bande en herbe ou piste en dur
- Les chiffres simples sans décimales indiquent des altitudes
- Les chiffres entre parenthèses indiquent des hauteurs
- Les chiffres à trois décimales indiquent des fréquences VHF pour la radiocommunication
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Symboles détaillant les aérodromes
-
Symboles détaillant les villes et rappelant les règles de survol
Exploitation des cartes
De la carte à la réalité : Mesure de la direction et de la distance
- La direction se mesure grâce à un rapporteur. L'objectif est de mesurer l'angle que forme la route avec le méridien le plus proche. Une route à l'Est vaut 90°, au Sud 180°, à l'Ouest 270°. Une prudence particulière doit être prise pour ne pas confondre le sens de la route, ce qui occasionnerait une erreur de 180°.
- La distance se mesure grâce à une règle graduée entre deux points. En considérant que l'erreur d'échelle est négligeable (voir anomalies dû à la projection Lambert conique), il fait multiplier la distance mesurée par l'échelle de la carte afin d'obtenir la distance réelle.
-
Mesure de la direction d'une route entre Brienne et Vatry.
-
Mesure de la distance entre Brienne et Vatry par 2 méthodes. 1) 8.6cm x 500 000 = 43.5km. 2)utiliser un méridien comme règle gradué en y reportant la longueur : 00°24'00" = 24NM = 44.5km. L'écart de 1km est peu important.
De la réalité à la carte : Tracer un relèvement et un éloignement
- Un relèvement est la détermination de l'angle que fait, dans le plan horizontal, la ligne d'un observateur (le pilote) vers un objet avec celle d'une direction de référence fixe (le Nord géographique dans le cas le plus courant). Cette angle est mesuré en vol puis reporté sur la carte.
- Un éloignement est une distance déterminée en vol entre l'aéronef et un point géographique connu. Cette distance est ensuite reportée sur la carte.
Avec au minimum 2 relèvements, ou 1 relèvement et 1 éloignement, il est possible de connaître sa position sur une carte.
-
Tracé de 2 relèvements pour déterminer sa position (ces relèvements peuvent par exemple être transmit par le contrôle aérien de chacun des aérodromes par radiogoniométrie des émissions de l'aéronef).
-
Tracé d'un relèvement et d'un éloignement (provenant par exemple d'une estimation grâce au temps de vol et à la vitesse sol).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a trois méthodes de navigation :
Le cheminement
Cheminer consiste à utiliser les repères au sol caractéristiques et bien visibles depuis un aéronef. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps. On appelle aussi cheminement le fait de se diriger, à vue, de repères en repères situés à proximité l'un de l'autre.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
En vol, il est courant de confondre différents repères et ainsi avancer dans une mauvaise direction. A court terme, cela engendre une situation d’égarement. Pour garder une bonne conscience de la situation, le pilote doit évaluer le niveau de certitude de sa position :
- 1 à 2 repères = position peu sûre à conforter au plus vite,
- 3 à 4 repères = position fiable,
- 5 à 6 repères = position très fiable...
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct (une ligne droite) et que le cheminement n'est pas possible par manque de repères (ou des repères trop éloignés l'un de l'autre).
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères.
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon.
Pour naviguer à l'estime, les notions entre les différentes Vitesses sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées :
- La Vitesse Indiquée : En vol, l'indicateur de vitesse affiche la Vitesse Indiquée (VI ou IAS pour Indicated Air Speed en anglais). Cette indication n'est pas exacte.
- La Vitesse Conventionnelle : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument. Lorsque besoin, le manuel de vol explique la façon de déduire la Vc depuis la Vi (Vc ou CAS pour Calibrated Air Speed en anglais);
- La Vitesse Vrai : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou TAS pour True Air Speed en anglais);
- La Vitesse Propre : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp);
- La Vitesse équivalente : C'est la vitesse d'un aéronef, corrigée des effets de la compressibilité à l'altitude donnée (Ev ou EAS pour Equivalent Air Speed en anglais)
- La Vitesse sol : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou GS pour Ground Speed en anglais). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation).
-
Vent de face, la vitesse sol est plus faible.
-
Vent arrière, la vitesse sol est plus élevée.
-
les composantes d'un vent quelconque.
Pour naviguer à l'estime, il est nécessaire de connaître ces définitions :
- ETA : Estimated Time of Arrival en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé.
- la Route : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de Route vrai) ou par rapport au Nord magnétique (on parle de Route magnétique);
- le Cap : C'est la direction de la ligne de fois de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le cap compas), au Nord magnétique (le cap magnétique), ou au Nord vrai (le cap vrai).
- Le vent (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le vent effectif qui est la composante venant de face ou de l'arrière, et le vent de travers qui est la composante venant perpendiculairement à la trajectoire.
- la Dérive : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la correction de dérive ou angle de correction de dérive. En l'absence de vent de travers, le cap et la route sont identiques.
-
les composantes d'un vent quelconque.
-
La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive.
-
Après application d'un cap au vent pour créer un angle de correction de dérive.
Le computer de navigation
Un computer de navigation est une forme de règle à calcul circulaire utilisée dans l' aviation. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation.
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Durant le vol, le pilote navigue facilement grâce à la préparation menée au sol. Toutefois, il sera nécessaire d'évaluer et d'ajuster un certain nombre de paramètres, en croisière le pilote utilise des repères connus pour actualiser les éléments de navigation :
- Actualisation de la vitesse sol : Durant une ligne droite, il va être possible de déterminer sa vitesse sol réelle en fonction de la distance parcourue entre deux repères et le temps passé (chronomètre). Il est possible de corriger la vitesse sol estimée au départ.
- Actualisation de la vitesse et de la direction du vent : Grâce à la connaissance de la vitesse sol et de la dérive constatée en vol, le pilote peut en déduire la vitesse et la direction du vent (triangle des vitesse). Cet élément permet d'actualiser les corrections à apporter sur le prochain segment de navigation.
- Corrections de trajectoires : Si la route suivi n'est finalement pas la route escomptée, le pilote appliquera des corrections de trajectoire. Ces corrections permettent de revenir sur la route et sont plus ou moins forte suivant la nécessité de corriger l'écart rapidement (relief, espaces aériens, nécessité de se rapprocher d'un repère pour éviter l'égarement...)
- Révisions des ETA : L’ensemble des paramètres révisés permettent de conclure à une modification des ETA.
Pour la navigation à vue, et particulièrement la navigation à l'estime, le Journal de navigation ou Log de navigation est une technique de préparation des informations (au sol) et d'actualisation (en vol). Il s'agit d'un petit tableau regroupant les informations de navigation par ordre chronologique (points tournant, route magnétique, distance, carburant, ETA...etc). Bien que le format de base soit commun, chaque pilote peut y ajouter des informations qu'il souhaite retrouver facilement durant le vol. Ce document est créé lors de la préparation du vol et il est emmené en vol au même titre qu'une carte. Durant le vol, le pilote corrigera les informations en fonction de l'actualisation des paramètres.
-
Exemple de log de navigation complété.
-
Tracé exemple d'une navigation LFMX - Vinon - Gap sur une carte aéronautique au 1/500 000
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Utilisation du Service d'Information de Vol
Le Service d'Information de Vol, souvent appelé SIV (traduit de Flight Information Service ou FIS en anglais) est un service apporté à tout aéronef évoluant dans une Région d'information de vol (traduit de Flight Information Region ou FIR en anglais). Une FIR s'étant du sol au FL195. A l'intérieur d'une FIR, le Service d'Information de Vol peut être rendu par différentes entités, suivant l'endroit où l'aéronef évolue :
- Lorsque l'aéronef évolue dans un espace aérien contrôlé (classe d'espace E, D, C, B, A), il est rendu par les services du contrôle.
- Lorsque l'aéronef évolue en classe d'espace G, il est rendu par un centre de service de la circulation aérienne proche.
Pour l'aviation générale en France, le Service d'Information de Vol est disponible durant tout le vol. Dans le cadre du Service d'Information de Vol, l'organisme (contacté par radio) peut transmettre des renseignements (règlementation SERA, article SERA.9005):
- sur la disponibilité des services de radionavigation;
- sur les modifications de l’état des aérodromes et des installations et services connexes, y compris des renseignements sur l’état des aires de mouvement lorsque leurs caractéristiques sont modifiées par la présence de neige, de glace ou d’une épaisseur significative d’eau;
- sur les conditions météorologiques observées ou prévues aux aérodromes de départ, de destination et de dégagement;
- sur les risques de collision;
- sur les renseignements disponibles sur la circulation et les conditions météorologiques le long de la route lorsque ces conditions sont susceptibles de rendre impossible la poursuite du vol selon les règles de vol à vue ;
- sur tout autre renseignement susceptible d’avoir une incidence sur la sécurité.
- Cette liste est réduite aux informations utiles au vol en planeur.
Dès que besoin, le pilote peut bénéficier du SIV en contactant le service adéquat par radio. C'est un service gratuit, permettant d'augmenter le niveau de sécurité.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Bases de la propagation des ondes radioélectrique
Aujourd'hui, beaucoup de systèmes fonctionnent avec des ondes radioélectriques comme le téléphone sans fil ou la télévision. En aéronautique, la possibilité de transmettre des informations grâce à des ondes radioélectriques est très utile comme par exemple pour communiquer oralement, donner des informations de direction, ou encore des informations de position...etc.
Afin d'exploiter correctement ces systèmes, et surtout d'en connaître les limitations respectives, il est nécessaire d'aborder brièvement leur fonctionnement.
Caractéristiques des Antennes : Les ondes électromagnétiques sont émises par des antennes. La forme et la taille de l'antenne peut être très différent suivant :
- La fréquence de l'onde électromagnétique utilisée : Pour un même type d'antenne, plus la fréquence est élevée et plus l'antenne est petite.
- La directivité de l'antenne : Une antenne peut émettre dans toutes les directions (utile en communication radio), ou alors seulement dans une direction particulière (utile pour un radar). Toutes les antennes connaissent des "angles morts" où elles n'émettent (ou ne reçoivent) pas du tout.
- La puissance de l'onde à émettre : Une antenne de forte puissance ou prévue pour capter de très faibles signaux est généralement plus grande.
-
Antenne pour la communication VHF (118 à 137 MHz)
AJOUTER PHOTO ANTENNE Flarm, Antenne GPS, Antenne transpondeur, Antenne VOR, antenne VDF
La Propagation des ondes : Suivant la fréquence de l'onde utilisée, la propagation des ondes radio est différente. Les concepteurs des systèmes aéronautiques choisissent la fréquence la plus adaptée au besoin du système. Les 3 types de propagation sont :
- les ondes de sol (0.03 à 0.3 MHz) : C'est lorsque l'onde se propage en suivant la courbure de la terre. Utile pour établir des communication mondiales, mais la puissance nécessaire est très importante.
- les ondes de ciel (1 à 30MHz) : C'est lorsque l'onde est capable d'être réfléchie par une couche de l'atmosphère (la ionosphère) et sur le sol, permettant par exemple d'établir des communications entre deux vallées encaissées et des communications mondiales avec plusieurs rebonds.
- les ondes directes (30MHz et plus) : C'est lorsque l'onde se propage en ligne droite, et sont arrêtées par les obstacles. C'est la portée optique. Pour établir une transmission entre un émetteur et un récepteur, il faut que ces derniers puisse se voir. Les montagnes peuvent empêcher la propagation (les bâtiments dans une moindre mesure), mais c'est surtout le fait que la terre soit ronde qui limite la portée optique. Dans le cas du franchissement de l’horizon, plus l'émetteur et le récepteur sont haut, et plus la portée optique est grande. Il est possible de calculer la portée optique avec l'altitude de l'aéronef (h) en mètre : . Il faut noter que cette formule ne prend en compte que les contraintes géométriques de la Terre. En tenant compte de l'atmosphère terrestre, la portée est légèrement plus grande.
-
La propagation par onde de sol sur la surface de la Terre.
-
La propagation par onde de ciel réfléchie entre ciel et terre.
-
La propagation par onde directe (portée optique).
La puissance de l'onde : La puissance émise par une antenne se propage et se répartie dans plusieurs directions. Au fur et à mesure que l'onde s'éloigne de son antenne, sa puissance émise se dilue sur une zone de plus en plus grande. Il est possible que pour un récepteur très éloigné, la puissance soit trop diluée (trop faible) et qu'aucun signal ne soit détecté. La portée est donc limitée par la puissance émise et par la sensibilité du récepteur. Modèle en boucle détecté : 9-8 Bases radionavigation et radar (motoplaneurs) Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation par satellite est une technique de navigation basé sur système de positionnement par satellites.
Un système de positionnement par satellites (ou GNSS pour Global Navigation Satellite System en anglais) est un ensemble de composants reposant sur une constellation de satellites artificiels permettant de déterminer sa position 3D, sa vitesse 3D et l'heure grâce à un récepteur portable de petite taille. Cette catégorie de système de géopositionnement a pour avantage une précision de l'ordre de 5 à 15 mètres, une couverture quasi-mondiale. A l’inverse, le type d'onde utilisée rend le système sensible aux obstacles présents entre le terminal récepteur et les satellites (immeubles, montagnes...).
En plus de cet ensemble, certains systèmes d'augmentation et de fiabilisation permettent de fiabiliser le système et d'améliorer les performances à une précision de quelques mètres (DGPS, EGNOS, Assisted GPS...).
Mise en œuvre
Le système GPS (le système développé par les États-Unis) repose sur une constellation d'une trentaine de satellites qui permet à un utilisateur, situé sur n'importe quel point du globe, d'avoir toujours au minimum quatre satellites à portée (dans l'hypothèse d'un environnement dégagé d'obstacles dit « clear sky »). Le terminal de l'utilisateur calcule sa position grâce au signal émis par chacun des satellites. À ce stade, la communication est mono-directionnelle, c'est-à-dire que le terminal de l'utilisateur ne fait que recevoir les signaux.
| Informations disponibles sur le récepteur en fonction du nombre de satellites en vue | |
|---|---|
| 2 satellites | Date et heure |
| 3 satellites | Date et heure + position horizontale (latitude et longitude) |
| 4 satellites et + | Date et heure + position horizontale + position verticale (altitude) |
Avantages
- Le système GNSS permet de se positionner très rapidement directement sur une carte.
- De nombreuses fonctions des récepteurs permettent aussi de programmer la route suivie: dans la navigation aérienne sous forme de points tournants pour faciliter le travail du pilote.
- En planeur, le récepteur peut calculer des plans de finesses pour rejoindre les aérodromes proches.
Inconvénients
- Il faut être très attentif au « système de coordonnées » utilisé, et bien régler le récepteur afin qu'il fournisse les coordonnées dans le système de référence utilisé actuellement en aéronautique : Le système WGS 84.
- L'utilisation de cette technique nécessite la présence « d'électricité » à bord (panne du système si manque d'énergie à bord, particulièrement pour les planeurs)
Le système GPS des États-Unis était le premier en service. Depuis, ces systèmes sont disponibles :
-
Antenne d'un récepteur GNSS, environ 3cm de côté. Elle doit avoir une vue dégagée vers le ciel.
-
Coordonnées de Latitude et Longitude données par un récepteur GNSS d'ancienne génération (sans carte)
-
Récepteurs GNSS à bord d'un planeur avec affichage sur carte interactive (au centre).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Exercices
Ces documents sont disponibles afin de stimuler l'apprentissage par d'autres moyens que la simple lecture. Chacun est libre de les utiliser comme il l'entend: en autonomie, dans le cadre d'un devoir donné par un ATO/DTO, en TP lors de cours en DTO...etc. Wiki-SPL.net propose le contenu mais n'a pas vocation à répondre aux demandes d'aides à l'apprentissage. Ce rôle est assuré par les formateurs des ATO/DTO dont il faudra se rapprocher !
- Cahier d’exercices N°1 Document à imprimer. Prévoir un matériel basique (règle, crayon, rapporteur...).
Radiogoniométrie au sol Le principe est de déterminer la direction d'une émission radioélectrique. Au sol, ce principe est utilisé par les services de la Circulation Aérienne pour déterminer d'où provient l'onde radioélectrique de l'aéronef qui est en train de parler. Pour eux, c'est une aide importante pour comprendre la situation rapidement. Pour le pilote planeur, l'information de QDR (Relèvement magnétique en code Q) peut être obtenue sur simple demande par radio :
- Avec le QDR provenant de deux organismes de contrôles différents et une carte, il est possible d'obtenir sa position.
- Avec le QDR provenant d'un contrôleur d'aérodrome, il est possible de calculer une route pour prendre la direction de l'aérodrome (QDM en code Q). Le QDM est l’inverse du QDR (QDM = QDR +/-180°).
En France, tous les organismes de contrôle aérien disposent normalement d'un Radiogoniomètre. Dès qu'une communication radio est établie (portée optique), il est possible d'obtenir un QDR ou un QDM. Voici un exemple de demande à faire par radio :
- "Orléans info du motoplaneur F-CCUY, je suis égaré, pouvez vous me donner un QDR par rapport à l'aérodrome d'Orléans?"
- "F-CCUY de Orléans info, vous êtes dans le relèvement magnétique 145°"
- "Orléans info du F-CCUY, 145°, je vous remercie"
La précision des systèmes de radiogoniométrie moderne est bonne.
NDB/ADF (Radiocompas)
Le radiocompas est un système basé sur la radiogoniométrie. Des balises au sol placées aux points clefs des trajectoires des aéronefs émettent en permanence sur une fréquence comprise entre 190 et 1 750 kHz (en France, principalement entre 280 et 450 kHz). A bord de l'aéronef, un système de radiogoniométrie permet de mesurer l'angle entre la balise et l'axe longitudinal de l'aéronef.
- NDB : Non Directional Beacon en anglais, Balise Non Directionnelle en français. Il s'agit du nom de la balise au sol.
- ADF : Automatic Directional Finder en anglais, Radiocompas en français. Il s'agit du nom de l'instrument implanté à bord de l'aéronef.
La fréquence utilisée permet la propagation en onde de sol. La portée n'est donc pas limité par l'horizon. Seule la puissance émettrice de la balise limite la portée.
Limitations du système ADF : le signal est affecté par les conditions atmosphériques, les terrains montagneux, la réfraction côtière et les orages, notamment sur les longues distances.
Utilisation :
- Le pilote souhaite exploitée une balise indiquée par sa carte;
- Il entre la fréquence de la balise sur son radiocompas;
- Pour vérifier que la bonne balise est sélectionnée, il écoute le message en morse qu'émet la balise toute les 15 secondes (3 lettres indiquées sur la carte);
- Le radiocompas pointe en direction de la balise.
-
Antenne NDB "NKR" à Leimen-Ochsenbach, Allemagne
-
Le symbole du NDB sur une carte. la fréquence de la balise est 428KHz, CTX est son identifiant émit en morse
-
radiocompas
VOR
Un système VOR (VHF Omnidirectional Range en anglais) permet de déterminer un relèvement magnétique par rapport à une station au sol (balise émetteur VOR dont la position est connue), et donc le radial sur lequel l'aéronef est situé. Par déduction, il permet de suivre n'importe quelle route passant par la station (en rapprochement ou en éloignement de celle-ci), ou même de déterminer la position exacte de l'avion en utilisant deux balises VOR (intersection de radiaux) ou un DME (intersection d'un radial et d'un arc DME).
La station au sol utilise la gamme de fréquences VHF de 108 à 117,95 MHz (donc une portée optique). Plus intéressant que le radiocompas, le VOR est moins soumis aux perturbations extérieures, telles celle de l'ionosphère ou simplement les nuages.
L'indicateur à bord qui permet de lire les indications du VOR se nome OBI (Omnidirectional Bearing Indicator en anglais). Il est composé de plusieurs indicateurs :
- le FLAG qui permet de savoir si on reçoit ou non le signal de la station VOR
- un bouton OBS (Omnidirectional Bearing Selector) pour choisir le radial auquel on souhaite se comparer
- une aiguille de déviation qui indique le résultat de la comparaison : si on se trouve à droite, à gauche ou sur le radial choisi
- derrière l'aiguille, une échelle indique l'amplitude de l'écart. Chaque point représente un écart de 2° soit une indication de 10° max de chaque côté
- un indicateur TO / FROM qui permet de savoir si on est en situation de rapprochement ou d’éloignement de la station sol
Utilisation :
- Le pilote souhaite exploitée une balise VOR indiquée par sa carte;
- Il entre la fréquence de la balise sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise (3 lettres indiquées sur la carte);
- Si le pilote souhaite intercepter un radial donné, il choisi le radial souhaité avec le bouton OBS et l'intercepte lorsque l'aiguille de déviation n'indique plus d'écart
- Si le pilote souhaite connaître le radial sur lequel il se trouve, il tourne le bouton OBS jusqu'a ce que l'aiguille de déviation n'indique plus déviation. L'indicateut TO/FROM lui permet de lever le doute entre QDR et QDM.
-
Vue aérienne d'un ensemble d'antenne d'une balise VOR de Sprimont "SPI" en Belgique
-
Le symbole du VOR sur une carte. la fréquence de la balise est 110.2MHz, DVL est son identifiant émit en morse
-
Omnidirectional Bearing Indicator. L'aiguille de déviation est au centre (5 graduations de chaque côté). L'indicateur TO/FROM indique FROM. Le radial sélectionné est le 252°.
DME
Un système DME (Distance Measuring Equipment en anglais) permet de connaître la distance oblique qui sépare un aéronef d'une station au sol en mesurant le temps que met une impulsion radioélectrique pour faire un aller-retour.
- Une station sol DME est typiquement implantée avec un VOR. On parle alors de station sol VOR/DME.
- Le DME est fonctionnellement identique au composant distance du TACAN, c'est dire qu'un utilisateur de DME peut exploiter les stations sol TACAN.
- Une station sol DME basse puissance peut être implantée avec un ILS pour mesurer la distance par rapport au seuil de piste lors d'une finale sans visibilité.
La station au sol utilise la gamme de fréquences UHF de 962 à 1 213 MHz (donc une portée optique) qui sont appariées à celles des VOR et des ILS : c'est à dire que la fréquence du DME est automatiquement sélectionnée lorsque le pilote renseigne la fréquence du VOR ou le l'ILS. A noter que c'est la distance oblique qui est mesurée, donc si l'aéronef passe à la verticale de la station sol, le DME indiquera la hauteur de l'aéronef.
l'OACI préconise une précision minimum de ±(0,25 milles nautiques + 1,25 % de la distance). Une station sol peut gérer environ 100 aéronefs. Au delà, elle ignore les aéronefs les plus loin.
Utilisation :
- Le pilote souhaite exploitée une balise VOR/DME indiquée par sa carte;
- Il entre la fréquence de la balise VOR sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise un peu plus aigüe que le code du VOR (3 lettres indiquées sur la carte);
- La distance oblique s'affiche à l'écran quelques secondes plus tard.
- Si l'aéronef est très éloigné par rapport à une station sol, il sera dans les premiers à perdre l'information si la balise devient saturée.
-
Vue d'antenne DME seule.
-
Le symbole du VOR/DME sur une carte. la fréquence du VOR 116.7MHz doit être sélectionnée pour utiliser le DME appariée, MOU est son identifiant émit en morse
-
Afficheur DME. En exploitant la variation de la distance en fonction du temps, il peut indiquer une vitesse sol radiale, et le temps restant pour atteindre la balise.
Les Radars
Radar primaire au sol
Le radar (acronyme issu de l'anglais RAdio Detection And Ranging) est un système qui utilise les ondes électromagnétiques pour détecter la présence et déterminer la position des aéronefs. Les ondes envoyées par l'émetteur sont réfléchies par la cible, et les signaux de retour (appelés écho-radar) sont captés et analysés par le récepteur. La distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne. L'altitude ne peut pas être mesurée, bien que les systèmes modernes et plus élaborés parviennent à donner une indication d'altitude.
Ce principe de Radar ne nécessite aucun instrument à bord de l'aéronef et est appelé Radar primaire. La fréquence utilisée est choisie pour être réfléchies par les aéronefs sans être (trop) perturbée par les phénomènes météo. La portée est la portée optique. Les puissances émises sont très importantes car l'onde doit faire le voyage aller, être partiellement réfléchie par l'aéronef, et faire le voyage retour.
Généralement, le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), et proche de lui (impossibilité de recevoir le signal tant que l'antenne émet). Comme le système est à portée optique, un aéronef en basse altitude masqué par un relief n'est pas visible. Ce type de radar n'est pas forcement disponible par tous les centres de contrôles.
Utilisation :
- le radar balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les échos-radar s'affichent sur l'écran du contrôleur aérien, mais le système ne donne aucune information sur ces plots radar.
- classiquement, le radar primaire ne permet pas de connaître l'altitude de l'aéronef
-
Principe du radar primaire.
-
Antenne du radar primaire, dans un couple radar primaire + radar secondaire.
-
Type d'écran de radar primaire non filtré avec tous les échos-radar parasites.
Radar de surveillance secondaire
Le radar secondaire (ou SSR pour Secondary Surveillance RADAR en anglais), est un dispositif radar de contrôle aérien qui « interroge » les aéronefs équipés d'un transpondeurs qui sont à sa portée. Les transpondeurs interrogés répondent au radar en envoyant le code à 4 chiffre entré par le pilote (ce code est communiqué par le contrôle aérien par radio). Les réponses des avions sont captées et analysées par le récepteur. Comme pour le radar primaire, la distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne, et l'altitude ne peut pas être mesurée. L’intérêt du radar secondaire est que chaque plot radar est identifié par le code à 4 chiffres permettant au contrôle aérien d'identifier sans ambiguïté qui est qui.
Pour être visible du contrôle aérien, il est impératif d'avoir un transpondeur en fonctionnement à bord de l'aéronef. La fréquence utilisée est de 1030MHz (interrogations radar sol) et 1090MHz (réponse du transpondeur). La portée est la portée optique (donc un aéronef en basse altitude masqué par un relief n'est pas visible). Les puissances émises sont moins importantes qu'un radar primaire car l'onde ne doit faire que le voyage aller. Le voyage retour est fait l'onde émise par le transpondeur.
Le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), ou proche de lui (technologie de Suppression des Lobes Secondaires) mais la zone est généralement couverte par une antenne voisine. Il a été constaté qu'un planeur en spirale peut temporairement disparaitre des écrans radar.
Les technologies de radar secondaire ont évolué au fil du temps :
- Le mode A : Le mode le plus basique. Le transpondeur répond avec le code SSR composé de 4 chiffres de 0 à 7.
- Le mode C : Le transpondeur répond avec le code SSR + l'altitude pression à laquelle se trouve l'aéronef. Sur l'écran du contrôleur, le plot radar apparait avec le code et l'altitude, permettant une gestion fine de la circulation aérienne.
- Le mode S : Le transpondeur répond avec le code SSR + l'altitude + l'immatriculation + d'autres informations...Sur l'écran du contrôleur, le plot radar apparait avec l'immatriculation et l'altitude. Ce mode permet au contrôleur une meilleure réactivité et de donner le même code SSR à plusieurs aéronefs.
En France en 2020, le radar secondaire mode S est disponible dans une majorité de centres de contrôles.
Lors d'un vol sans service ATS, le pilote peut mettre un code de sa propre initiative afin de transmettre un message particulier :
| Liste des codes SSR à connaître | |
|---|---|
| Code | Signification |
| 7000 | Code à utiliser France en l'absence de d'ATS, pour transmettre sa position et améliorer la sécurité. Obligatoire, sauf pour les aéronefs à autonomie électrique limitée (planeurs pur, ballons...) |
| 7500 | Code pour signifier une intervention illicite (détournement...) |
| 7600 | Code pour signifier une panne des moyens de communication radio |
| 7700 | Code pour signifier une situation d'urgence ou d'interception |
Aussi, le système TCAS (implanté généralement à bord des aéronefs de tailles moyennes) interrogent les transpondeurs de tous les autres aéronefs dans un rayon de quelques dizaines de kilomètres. La position des autres aéronefs est connu, permettant de prévenir les collisions.
- le pilote affiche le code 7000, ou un code donné par l'ATS par radio.
- le radar secondaire balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les réponses des transpondeurs s'affichent sur l'écran du contrôleur aérien. En fonction du Mode (A, C ou S), plus ou moins d'informations apparaissent à côté du plot radar.
- Le contrôleur peut demander à un pilote de mettre Transpondeur IDENT. Le pilote doit appuyer sur le bouton IDENT.
- Le plot radar apparait alors en surbrillance pendant quelques minutes, pour aider l'identification par le contrôleur.
-
Antenne du radar secondaire, dans un couple radar primaire + radar secondaire.
-
transpondeur à bord. Code actif 7000 (en haut), mode A + C + S. Noter le bouton Ident en haut à droite.
-
Type d'écran de radar secondaire. Aéronef 1 : mode C, Alt. 700ft, 70kt. Aéronef 2 : mode S, alt. 2600ft, 70kt. Aéronef 3 : mode S, alt. 200ft, 100kt.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation aérienne est l'ensemble des techniques permettant à un pilote d'aéronef de maîtriser ses déplacements. La navigation permet à l'aéronef de suivre une trajectoire appelée route.
La navigation aérienne est largement héritière de la navigation maritime et la terminologie utilisée est identique.
Aux débuts de l'aviation, les navigations se faisaient à vue. En cas de conditions de visibilité dégradées, des phares aéronautiques jalonnaient certains tronçons de routes régulièrement empruntées, comme celle de l'Aéropostale qui amenaient le courrier de la France vers l'Afrique puis l’Amérique du Sud.
Au cours de la seconde moitié du XXe siècle, s’est développée la radionavigation. Au début du XXIe siècle, la navigation aérienne utilise largement le GPS.
Définitions
Le système solaire
Les variations saisonnières de la position du soleil sont créées par l'inclinaison de l'axe de rotation de la Terre par rapport au plan de son orbite autour du Soleil (écliptique). Pour un observateur terrestre, tout au long de l'année, le Soleil, bien que fixe, semble avoir une trajectoire différente dans le ciel. L'été est la saison où la journée dure le plus longtemps et le soleil monte le plus haut dans le ciel.
-
Alternance des saisons sur une année.
-
Mouvement apparent du soleil durant la journée pour un observateur situé dans l'hémisphère nord, en France
Se repérer sur la Terre
Afin de se repérer sur la sphère terrestre, la sphère est quadrillée par :
- Des Parallèles. Lorsqu'on se déplace vers le Nord ou le Sud (en restant sur le même méridien), on change de parallèle. Les Parallèles sont numérotés en degrés (0° étant l'équateur) plus une indication Nord ou Sud. le pôle Nord est numéroté 90°N. Paris se situe au niveau du parallèle 48,8°N. Il s'agit de la coordonnée de Latitude
- Des Méridiens. Lorsqu'on se déplace vers l'Ouest ou l'Est (en restant sur le même parallèle), on change de méridien. Les méridiens sont numérotés en degrés (0° étant le méridien passant par l'observatoire royal de Greenwich) plus une indication Ouest ou Est. Paris se situe au niveau du méridien 2,3°E. Il s'agit de la coordonnée de Longitude
-
Principaux parallèles, permettant de mesurer la Latitude et Principaux méridiens, permettant de mesurer la Longitude
Les coordonnées peuvent être exprimées de deux manières :
- Expression en degrés et décimale : La tour Eiffel à Paris se situe exactement aux coordonnées 48.8582N, 2.2945E
- Expression en degrés, minutes et secondes : parfois noté « DMS ». Chaque degré est divisé en 60minutes (1°=60'), puis chaque minute et divisé en 60secondes (1'=60"). La tour Eiffel se situe exactement aux coordonnées 48°51'29"N, 2°17'40"E
Les parallèles et les méridiens sont des arcs de cercles. Il est possible de les classer en 2 catégories :
- Ceux qui sont dit Grand cercles : l'arc de cercle à pour centre le centre de la terre, sont rayon est toujours égal à celui de la terre. Tous les méridiens sont des grand cercles. L'équateur est aussi un grand cercle.
- Ceux qui sont dit Petit cercles : tous les autres cercles n'ayant pas pour centre le centre de la terre. Mis a part l'équateur, tous les parallèles sont des petits cercles.
L'intérêt de cette classification est l'exploitation des Grands Cercles : leur périmètre est toujours égal au périmètre de la terre, c'est à dire environ 40 000km. Par exemple, tout déplacement de 0°01'00" en coordonnés le long d'un grand cercle fera toujours la même distance :
la longueur d'une minute d'arc (0°01'00") au niveau d'un grand cercle est la définition d'un Mille marin (nautique miles en anglais, noté NM). Cette astucieuse définition permet de calculer rapidement la distance qui sépare deux coordonnées. En ignorant les secondes d'arc, la distance entre la tour Eiffel (48°51'N, 2°17'E) et la tour de Pize (43°43'N, 10°23'E) est 05°08' sur l'axe Nord/Sud (soit 308NM).
Le temps
Le temps est une notion indispensable en navigation. Les divisions qui permettent de mesurer le temps sont faciles à appréhender et universelles : l'année, le jour, l'heure, la minute...etc. Le point de référence est beaucoup plus délicat car il en existe un certain nombre :
- LMT, Local Mean Time en anglais. C'est l'heure qui a pour référence le soleil. Lorsque le soleil est au zénith, la montre est réglée à 12h00. Cette référence dépend donc de la position géographique. Chaque endroit possède son heure LMT. Ce système est peu pratique et n'est quasiment plus utilisé aujourd'hui.
- Heures légales. Il s'agit d'une heure de référence pour un large territoire afin de résoudre les problèmes posés par l'heure LMT. Ce sont notamment les fuseaux horaires : la terre est décomposé en 24 fuseaux de 60minutes chacun qui possèdent tous leur propre heure légale de référence.
- UTC, Universal Time Coordinated en anglais. C'est une heure de référence mondiale, qui a pour référence le méridien d'origine 0°(Greenwich). A 12h UTC, le soleil est au zénith à Greenwich, mais il fait nuit dans l'Océan Pacifique. Les dénominations heure GMT] ou heure TU peuvent être considérées identique à l'heure UTC. Cette explication est en fait approximative mais suffisante pour le pilote planeur.
En aéronautique, les heures sont souvent définies en heure UTC car il est plus facile d’œuvrer avec une seule référence quelque soit le lieu ou le moment. Pour que le pilote puisse utiliser sa montre réglée en heure locale, il faudra ajouté l'écart entre l'heure UTC et son heure légale. En France, le décalage par rapport à l'heure UTC est : UTC+1 en hiver et UTC+2 en été.
La ligne de changement de date est une ligne imaginaire, à la surface de la Terre, approximativement située au 180e méridien (est et ouest) dans l'océan Pacifique ; son rôle est d'indiquer l'endroit où il est nécessaire de changer de date quand on la traverse. Les pilotes planeur européen sont peu concerné par cette notion.
Afin de définir les heures auxquelles la luminosité est suffisante pour entreprendre un vol VFR de jour, il est nécessaire de définir :
- le lever du soleil, SunRise en anglais (SR) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le matin.
- Le coucher du soleil, SunSet en anglais (SS) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le soir.
- le crépuscule civil : C'est la période où le centre du Soleil est situé à moins de 6° sous la ligne d'horizon.
La journée aéronautique durant laquelle le vol VFR de jour est possible commence au début du crépuscule avant le lever du soleil et se termine à la fin du crépuscule après le coucher du soleil. Aux latitudes moyennes (30 à 60°) cette définition est souvent simplifié, la journée aéronautique commence à SR-30min et se termine à SS+30min
Les directions
Afin de donner une direction, les points cardinaux sont utilisés. Pour un degré de précision plus important dans l'expression d'une direction, un angle est exprimé en prenant le Nord comme référence.
-
Rose des vents, indiquant les points cardinaux.
-
Rapporteur permettant d'exprimer une direction par un angle.
Les Distances
Les distances horizontales sont exprimées en Mille marin ou en kilomètres.
- Pour convertir rapidement des Nautiques Miles en kilomètres par calcul mental, une bonne approximation (erreur de 3%) est : prendre le double (x2), et retirer 1/10e.
Les distances verticales sont exprimées en Pied ou en Mètre.
- Pour convertir rapidement des Pieds en Mètres par calcul mental, une bonne approximation (erreur de 1.5%) est : multiplier par dix (x10), diviser par trois (/3).
- Pour convertir rapidement des Mètres en Pieds par calcul mental, une bonne approximation (erreur de 1.5%) est : diviser par dix (/10), multiplier par trois (x3).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Magnétisme et compas
Le compas est un instrument de bord permettant de mesurer la direction en utilisant le champ magnétique terrestre. Son fonctionnement est similaire à celui d'une boussole. C'est un instrument simple, mais les limitations de la mesure grâce au champ magnétique sont multiples :
- Le champ magnétique terrestre n'est pas aligné avec l'axe de rotation de la terre. Le compas indique les directions par rapport à la direction du pôle Nord magnétique, qui n'est pas au même endroit que le pôle Nord géographique. On dit que la différence entre les deux directions magnétiques et géographiques est la déclinaison magnétique.
-
Déclinaison magnétique. Le compas indique le pôle Nord magnétique.
- Le Nord magnétique bouge notablement en 6 à 12mois. La déclinaison doit être mise à jour régulièrement. Des cartes spécifiques présentent la déclinaison en fonction de chaque position sur terre. Les lignes qui joignent les endroits d'égale déclinaison sont appelées lignes isogones. En France et à notre époque, par chance, la déclinaison est négligeable (proche de 0°).
-
Évolution de la déclinaison entre 1590 et 1990 en fonction de la position sur la Terre, par représentation des lignes isogones. Cliquer pour voir l'animation.
-
Lignes d'égale déclinaisons magnétiques (les isogones) en France en 2020 (en orange clair). Service de l’Information Aéronautique - Données originales téléchargées sur https://www.sia.aviation-civile.gouv.fr, mise à jour du 26 mars 2020.
- Le compas est instrument imparfait. Il n'indique pas parfaitement le Nord magnétique. Ceci est dû au compas lui-même mais aussi à l'installation dans l'aéronef. On dit que cette erreur est la déviation. Cette erreur dépend de la direction qu'il indique. Une table de correction est disponible à proximité immédiate du compas.
-
Courbe de déviation en fonction des directions mesurées pour un compas maritime.
-
Le cap compas indiqué est de 45°. La déviation indiquée par la table (en rouge) est entre -2° et -5°. Le cap magnétique est donc de l'ordre de 42°.
Afin d'obtenir la vrai direction, les erreurs de déclinaison et déviation doivent être retirées par calcul :
-
Correction de la déviation et de la déclinaison après lecture du cap compas. Dans l'autre sens, procéder aux correction en inversant le signe.
Le compas mesure la direction du champ magnétique là où il se trouve. Tout éléments qui génère un champ magnétique peut l'influencer, il en résultera une indication de direction très erronée. Le pilote doit prendre les précautions nécessaires pour garantir la bonne indication du compas :
- un aimant placé à proximité d'un compas : des aimants sont présents dans les casques utilisé dans les aéronefs, les téléphones...
- les systèmes électriques de l'aéronef génèrent divers champs magnétiques dû à la circulation du courant électriques dans les câbles. Le fonctionnement de certaines servitudes électriques peut donc influencer le compas.
- les masses métalliques ferromagnétiques, même sans être des aimants, posent problèmes. Un stylo qui possède un corps métallique à proximité immédiate d'un compas rend son indication fausse.
Enfin, le compas indique une valeur correcte en ligne droite en l'absence de turbulence importante. Il ne faut pas prendre en compte l'indication d'un compas :
- lors d'un virage;
- lors de turbulences importantes.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Cartes
Une carte présente des informations en fonction de la position considérée. En aéronautique, ces informations concernent les repères visibles, les angles, les distances, les informations sur l'espace aérien...etc. Il est nécessaire d'appréhender les codes de conception et de lecture des cartes pour une utilisation correcte.
Le type de projection cartographique
La projection cartographique est un ensemble de techniques permettant de représenter une surface non plane (surface de la Terre, d'un autre corps céleste, du ciel, ...) dans son ensemble ou en partie sur la surface plane d'une carte. L'impossibilité de projeter le globe terrestre sur une surface plane sans distorsion explique que diverses projections aient été inventées, chacune ayant ses avantages :
- La projection de Mercator : C'est une projection cylindrique. Les méridiens et les parallèles sont des droites perpandiculaires qui quadrillent le plan. Cette projection conforme conserve les angles (ce qui permet de reporter directement sur la carte les angles mesurés au compas, et vice-versa) mais ne conserve ni les distances, ni les surfaces (l'échelle de la carte variant avec la latitude). Sauf le long de l'équateur. Une ligne droite sur une carte de Mercator ne représente pas la distance la plus courte en réalité. C'est en revanche une ligne d'azimut constant (c'est-à-dire une loxodromie), particulièrement utile pour naviguer à cap constant, même si le trajet ainsi défini n'est généralement pas sur un grand cercle et n'est donc pas le chemin le plus court.
-
Projection cylindrique projection Mercator.
-
Exemple de projection cylindrique avec déformation des distances importante au niveau des pôles.
- La projection conique conforme de Lambert : C'est une projection conique. Les méridiens sont des droites convergentes en un point, les parallèles sont des cercles concentriques autour de ce même point. Elle conserve également les angles. Elle conserve les distances sur le parallèle de référence. Il est donc particulièrement intéressant d'utiliser une projection de Lambert ayant son parallèle de référence sur la zone à exploiter. A proximité du parallèle de référence, une ligne droite sur une projection de Lambert représente la distance la plus courte en réalité (c'est-à-dire une orthodromie).
-
Projection conique type projection de Lambert.
-
Exemple de projection conique.
Les cartes utilisées par le pilote planeur
- La carte permet de représenter les éléments visibles au sol. En France, l'IGN fourni diverses cartes. Ces cartes sont par exemple disponibles en version numérique sur la plateforme Géoportail. L'expérience montre que pour un vol en planeur, une carte avec représentation schématique des éléments facilement identifiables en vol est la plus adaptée.
- La carte permet également de présenter sous forme graphique une partie des informations aéronautiques présentes dans les AIP (Aeronautical Information Publication en anglais) : aérodromes, espaces aériens, fréquences radio, systèmes de radionavigation...etc
Divers organismes proposent des cartes spécifiques à l'usage aéronautique pour différents besoins. En France, c'est principalement le SIA (Service de l'Information Aéronautique) qui éditer les cartes. En partant de la plus grande échelle, les cartes régulièrement utilisées pour le vol en planeur sont :
- La carte du SIA au 1/1 000 000ème : utilisée principalement pour de la radionavigation en route. Elle couvre l'espace du sol au FL195. Disponible en version numérique sur le site web du SIA
- La carte du SIA au 1/500 000ème : utilisée principalement pour de la navigation en route en vol à vue. Elle couvre l'espace du sol au FL115 (ou 3000ft ASFC, le plus élevé des deux). Disponible en version numérique sur Géoportail.
- Les cartes VAC (Visual Approach Chart en anglais) : Il s'agit d'une présentation de l'aérodrome dans son environnement. On y trouve une carte détaillée de l'aérodrome, le sens du tour de piste, ainsi que d'autres indications utiles pour y atterrir en vol à vue. Disponible en version nuémrique sur le site web du SIA
- D'autres types de cartes qui émanent d’initiatives privées ou associative pour répondre à un usage particulier.
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Carte VAC de Chalons Vatry. Source SIA
Les cartes aéronautiques sont réalisées selon un cahier des charges précis définie par l'annexe 4 de l'OACI. Cette annexe est disponible en lecture sur la librairie électronique de l'OACI. Les cartes sont mises à jour régulièrement, tous les 6 ou 12 mois.
La légende de la carte du SIA au 1/500 000ème (version 2021 disponible ici) est disponible sur Géoportail (icône "information de la couche > afficher la légende). Les symboles principaux doivent être connus du pilote de planeur. liste non-exhaustive :
- Aérodrome avec bande en herbe ou piste en dur
- Les chiffres simples sans décimales indiquent des altitudes
- Les chiffres entre parenthèses indiquent des hauteurs
- Les chiffres à trois décimales indiquent des fréquences VHF pour la radiocommunication
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Symboles détaillant les aérodromes
-
Symboles détaillant les villes et rappelant les règles de survol
Exploitation des cartes
De la carte à la réalité : Mesure de la direction et de la distance
- La direction se mesure grâce à un rapporteur. L'objectif est de mesurer l'angle que forme la route avec le méridien le plus proche. Une route à l'Est vaut 90°, au Sud 180°, à l'Ouest 270°. Une prudence particulière doit être prise pour ne pas confondre le sens de la route, ce qui occasionnerait une erreur de 180°.
- La distance se mesure grâce à une règle graduée entre deux points. En considérant que l'erreur d'échelle est négligeable (voir anomalies dû à la projection Lambert conique), il fait multiplier la distance mesurée par l'échelle de la carte afin d'obtenir la distance réelle.
-
Mesure de la direction d'une route entre Brienne et Vatry.
-
Mesure de la distance entre Brienne et Vatry par 2 méthodes. 1) 8.6cm x 500 000 = 43.5km. 2)utiliser un méridien comme règle gradué en y reportant la longueur : 00°24'00" = 24NM = 44.5km. L'écart de 1km est peu important.
De la réalité à la carte : Tracer un relèvement et un éloignement
- Un relèvement est la détermination de l'angle que fait, dans le plan horizontal, la ligne d'un observateur (le pilote) vers un objet avec celle d'une direction de référence fixe (le Nord géographique dans le cas le plus courant). Cette angle est mesuré en vol puis reporté sur la carte.
- Un éloignement est une distance déterminée en vol entre l'aéronef et un point géographique connu. Cette distance est ensuite reportée sur la carte.
Avec au minimum 2 relèvements, ou 1 relèvement et 1 éloignement, il est possible de connaître sa position sur une carte.
-
Tracé de 2 relèvements pour déterminer sa position (ces relèvements peuvent par exemple être transmit par le contrôle aérien de chacun des aérodromes par radiogoniométrie des émissions de l'aéronef).
-
Tracé d'un relèvement et d'un éloignement (provenant par exemple d'une estimation grâce au temps de vol et à la vitesse sol).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a trois méthodes de navigation :
Le cheminement
Cheminer consiste à utiliser les repères au sol caractéristiques et bien visibles depuis un aéronef. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps. On appelle aussi cheminement le fait de se diriger, à vue, de repères en repères situés à proximité l'un de l'autre.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
En vol, il est courant de confondre différents repères et ainsi avancer dans une mauvaise direction. A court terme, cela engendre une situation d’égarement. Pour garder une bonne conscience de la situation, le pilote doit évaluer le niveau de certitude de sa position :
- 1 à 2 repères = position peu sûre à conforter au plus vite,
- 3 à 4 repères = position fiable,
- 5 à 6 repères = position très fiable...
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct (une ligne droite) et que le cheminement n'est pas possible par manque de repères (ou des repères trop éloignés l'un de l'autre).
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères.
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon.
Pour naviguer à l'estime, les notions entre les différentes Vitesses sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées :
- La Vitesse Indiquée : En vol, l'indicateur de vitesse affiche la Vitesse Indiquée (VI ou IAS pour Indicated Air Speed en anglais). Cette indication n'est pas exacte.
- La Vitesse Conventionnelle : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument. Lorsque besoin, le manuel de vol explique la façon de déduire la Vc depuis la Vi (Vc ou CAS pour Calibrated Air Speed en anglais);
- La Vitesse Vrai : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou TAS pour True Air Speed en anglais);
- La Vitesse Propre : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp);
- La Vitesse équivalente : C'est la vitesse d'un aéronef, corrigée des effets de la compressibilité à l'altitude donnée (Ev ou EAS pour Equivalent Air Speed en anglais)
- La Vitesse sol : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou GS pour Ground Speed en anglais). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation).
-
Vent de face, la vitesse sol est plus faible.
-
Vent arrière, la vitesse sol est plus élevée.
-
les composantes d'un vent quelconque.
Pour naviguer à l'estime, il est nécessaire de connaître ces définitions :
- ETA : Estimated Time of Arrival en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé.
- la Route : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de Route vrai) ou par rapport au Nord magnétique (on parle de Route magnétique);
- le Cap : C'est la direction de la ligne de fois de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le cap compas), au Nord magnétique (le cap magnétique), ou au Nord vrai (le cap vrai).
- Le vent (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le vent effectif qui est la composante venant de face ou de l'arrière, et le vent de travers qui est la composante venant perpendiculairement à la trajectoire.
- la Dérive : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la correction de dérive ou angle de correction de dérive. En l'absence de vent de travers, le cap et la route sont identiques.
-
les composantes d'un vent quelconque.
-
La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive.
-
Après application d'un cap au vent pour créer un angle de correction de dérive.
Le computer de navigation
Un computer de navigation est une forme de règle à calcul circulaire utilisée dans l' aviation. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation.
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Durant le vol, le pilote navigue facilement grâce à la préparation menée au sol. Toutefois, il sera nécessaire d'évaluer et d'ajuster un certain nombre de paramètres, en croisière le pilote utilise des repères connus pour actualiser les éléments de navigation :
- Actualisation de la vitesse sol : Durant une ligne droite, il va être possible de déterminer sa vitesse sol réelle en fonction de la distance parcourue entre deux repères et le temps passé (chronomètre). Il est possible de corriger la vitesse sol estimée au départ.
- Actualisation de la vitesse et de la direction du vent : Grâce à la connaissance de la vitesse sol et de la dérive constatée en vol, le pilote peut en déduire la vitesse et la direction du vent (triangle des vitesse). Cet élément permet d'actualiser les corrections à apporter sur le prochain segment de navigation.
- Corrections de trajectoires : Si la route suivi n'est finalement pas la route escomptée, le pilote appliquera des corrections de trajectoire. Ces corrections permettent de revenir sur la route et sont plus ou moins forte suivant la nécessité de corriger l'écart rapidement (relief, espaces aériens, nécessité de se rapprocher d'un repère pour éviter l'égarement...)
- Révisions des ETA : L’ensemble des paramètres révisés permettent de conclure à une modification des ETA.
Pour la navigation à vue, et particulièrement la navigation à l'estime, le Journal de navigation ou Log de navigation est une technique de préparation des informations (au sol) et d'actualisation (en vol). Il s'agit d'un petit tableau regroupant les informations de navigation par ordre chronologique (points tournant, route magnétique, distance, carburant, ETA...etc). Bien que le format de base soit commun, chaque pilote peut y ajouter des informations qu'il souhaite retrouver facilement durant le vol. Ce document est créé lors de la préparation du vol et il est emmené en vol au même titre qu'une carte. Durant le vol, le pilote corrigera les informations en fonction de l'actualisation des paramètres.
-
Exemple de log de navigation complété.
-
Tracé exemple d'une navigation LFMX - Vinon - Gap sur une carte aéronautique au 1/500 000
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Utilisation du Service d'Information de Vol
Le Service d'Information de Vol, souvent appelé SIV (traduit de Flight Information Service ou FIS en anglais) est un service apporté à tout aéronef évoluant dans une Région d'information de vol (traduit de Flight Information Region ou FIR en anglais). Une FIR s'étant du sol au FL195. A l'intérieur d'une FIR, le Service d'Information de Vol peut être rendu par différentes entités, suivant l'endroit où l'aéronef évolue :
- Lorsque l'aéronef évolue dans un espace aérien contrôlé (classe d'espace E, D, C, B, A), il est rendu par les services du contrôle.
- Lorsque l'aéronef évolue en classe d'espace G, il est rendu par un centre de service de la circulation aérienne proche.
Pour l'aviation générale en France, le Service d'Information de Vol est disponible durant tout le vol. Dans le cadre du Service d'Information de Vol, l'organisme (contacté par radio) peut transmettre des renseignements (règlementation SERA, article SERA.9005):
- sur la disponibilité des services de radionavigation;
- sur les modifications de l’état des aérodromes et des installations et services connexes, y compris des renseignements sur l’état des aires de mouvement lorsque leurs caractéristiques sont modifiées par la présence de neige, de glace ou d’une épaisseur significative d’eau;
- sur les conditions météorologiques observées ou prévues aux aérodromes de départ, de destination et de dégagement;
- sur les risques de collision;
- sur les renseignements disponibles sur la circulation et les conditions météorologiques le long de la route lorsque ces conditions sont susceptibles de rendre impossible la poursuite du vol selon les règles de vol à vue ;
- sur tout autre renseignement susceptible d’avoir une incidence sur la sécurité.
- Cette liste est réduite aux informations utiles au vol en planeur.
Dès que besoin, le pilote peut bénéficier du SIV en contactant le service adéquat par radio. C'est un service gratuit, permettant d'augmenter le niveau de sécurité.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Bases de la propagation des ondes radioélectrique
Aujourd'hui, beaucoup de systèmes fonctionnent avec des ondes radioélectriques comme le téléphone sans fil ou la télévision. En aéronautique, la possibilité de transmettre des informations grâce à des ondes radioélectriques est très utile comme par exemple pour communiquer oralement, donner des informations de direction, ou encore des informations de position...etc.
Afin d'exploiter correctement ces systèmes, et surtout d'en connaître les limitations respectives, il est nécessaire d'aborder brièvement leur fonctionnement.
Caractéristiques des Antennes : Les ondes électromagnétiques sont émises par des antennes. La forme et la taille de l'antenne peut être très différent suivant :
- La fréquence de l'onde électromagnétique utilisée : Pour un même type d'antenne, plus la fréquence est élevée et plus l'antenne est petite.
- La directivité de l'antenne : Une antenne peut émettre dans toutes les directions (utile en communication radio), ou alors seulement dans une direction particulière (utile pour un radar). Toutes les antennes connaissent des "angles morts" où elles n'émettent (ou ne reçoivent) pas du tout.
- La puissance de l'onde à émettre : Une antenne de forte puissance ou prévue pour capter de très faibles signaux est généralement plus grande.
-
Antenne pour la communication VHF (118 à 137 MHz)
AJOUTER PHOTO ANTENNE Flarm, Antenne GPS, Antenne transpondeur, Antenne VOR, antenne VDF
La Propagation des ondes : Suivant la fréquence de l'onde utilisée, la propagation des ondes radio est différente. Les concepteurs des systèmes aéronautiques choisissent la fréquence la plus adaptée au besoin du système. Les 3 types de propagation sont :
- les ondes de sol (0.03 à 0.3 MHz) : C'est lorsque l'onde se propage en suivant la courbure de la terre. Utile pour établir des communication mondiales, mais la puissance nécessaire est très importante.
- les ondes de ciel (1 à 30MHz) : C'est lorsque l'onde est capable d'être réfléchie par une couche de l'atmosphère (la ionosphère) et sur le sol, permettant par exemple d'établir des communications entre deux vallées encaissées et des communications mondiales avec plusieurs rebonds.
- les ondes directes (30MHz et plus) : C'est lorsque l'onde se propage en ligne droite, et sont arrêtées par les obstacles. C'est la portée optique. Pour établir une transmission entre un émetteur et un récepteur, il faut que ces derniers puisse se voir. Les montagnes peuvent empêcher la propagation (les bâtiments dans une moindre mesure), mais c'est surtout le fait que la terre soit ronde qui limite la portée optique. Dans le cas du franchissement de l’horizon, plus l'émetteur et le récepteur sont haut, et plus la portée optique est grande. Il est possible de calculer la portée optique avec l'altitude de l'aéronef (h) en mètre : . Il faut noter que cette formule ne prend en compte que les contraintes géométriques de la Terre. En tenant compte de l'atmosphère terrestre, la portée est légèrement plus grande.
-
La propagation par onde de sol sur la surface de la Terre.
-
La propagation par onde de ciel réfléchie entre ciel et terre.
-
La propagation par onde directe (portée optique).
La puissance de l'onde : La puissance émise par une antenne se propage et se répartie dans plusieurs directions. Au fur et à mesure que l'onde s'éloigne de son antenne, sa puissance émise se dilue sur une zone de plus en plus grande. Il est possible que pour un récepteur très éloigné, la puissance soit trop diluée (trop faible) et qu'aucun signal ne soit détecté. La portée est donc limitée par la puissance émise et par la sensibilité du récepteur. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Radiogoniométrie au sol Le principe est de déterminer la direction d'une émission radioélectrique. Au sol, ce principe est utilisé par les services de la Circulation Aérienne pour déterminer d'où provient l'onde radioélectrique de l'aéronef qui est en train de parler. Pour eux, c'est une aide importante pour comprendre la situation rapidement. Pour le pilote planeur, l'information de QDR (Relèvement magnétique en code Q) peut être obtenue sur simple demande par radio :
- Avec le QDR provenant de deux organismes de contrôles différents et une carte, il est possible d'obtenir sa position.
- Avec le QDR provenant d'un contrôleur d'aérodrome, il est possible de calculer une route pour prendre la direction de l'aérodrome (QDM en code Q). Le QDM est l’inverse du QDR (QDM = QDR +/-180°).
En France, tous les organismes de contrôle aérien disposent normalement d'un Radiogoniomètre. Dès qu'une communication radio est établie (portée optique), il est possible d'obtenir un QDR ou un QDM. Voici un exemple de demande à faire par radio :
- "Orléans info du motoplaneur F-CCUY, je suis égaré, pouvez vous me donner un QDR par rapport à l'aérodrome d'Orléans?"
- "F-CCUY de Orléans info, vous êtes dans le relèvement magnétique 145°"
- "Orléans info du F-CCUY, 145°, je vous remercie"
La précision des systèmes de radiogoniométrie moderne est bonne.
NDB/ADF (Radiocompas)
Le radiocompas est un système basé sur la radiogoniométrie. Des balises au sol placées aux points clefs des trajectoires des aéronefs émettent en permanence sur une fréquence comprise entre 190 et 1 750 kHz (en France, principalement entre 280 et 450 kHz). A bord de l'aéronef, un système de radiogoniométrie permet de mesurer l'angle entre la balise et l'axe longitudinal de l'aéronef.
- NDB : Non Directional Beacon en anglais, Balise Non Directionnelle en français. Il s'agit du nom de la balise au sol.
- ADF : Automatic Directional Finder en anglais, Radiocompas en français. Il s'agit du nom de l'instrument implanté à bord de l'aéronef.
La fréquence utilisée permet la propagation en onde de sol. La portée n'est donc pas limité par l'horizon. Seule la puissance émettrice de la balise limite la portée.
Limitations du système ADF : le signal est affecté par les conditions atmosphériques, les terrains montagneux, la réfraction côtière et les orages, notamment sur les longues distances.
Utilisation :
- Le pilote souhaite exploitée une balise indiquée par sa carte;
- Il entre la fréquence de la balise sur son radiocompas;
- Pour vérifier que la bonne balise est sélectionnée, il écoute le message en morse qu'émet la balise toute les 15 secondes (3 lettres indiquées sur la carte);
- Le radiocompas pointe en direction de la balise.
-
Antenne NDB "NKR" à Leimen-Ochsenbach, Allemagne
-
Le symbole du NDB sur une carte. la fréquence de la balise est 428KHz, CTX est son identifiant émit en morse
-
radiocompas
VOR
Un système VOR (VHF Omnidirectional Range en anglais) permet de déterminer un relèvement magnétique par rapport à une station au sol (balise émetteur VOR dont la position est connue), et donc le radial sur lequel l'aéronef est situé. Par déduction, il permet de suivre n'importe quelle route passant par la station (en rapprochement ou en éloignement de celle-ci), ou même de déterminer la position exacte de l'avion en utilisant deux balises VOR (intersection de radiaux) ou un DME (intersection d'un radial et d'un arc DME).
La station au sol utilise la gamme de fréquences VHF de 108 à 117,95 MHz (donc une portée optique). Plus intéressant que le radiocompas, le VOR est moins soumis aux perturbations extérieures, telles celle de l'ionosphère ou simplement les nuages.
L'indicateur à bord qui permet de lire les indications du VOR se nome OBI (Omnidirectional Bearing Indicator en anglais). Il est composé de plusieurs indicateurs :
- le FLAG qui permet de savoir si on reçoit ou non le signal de la station VOR
- un bouton OBS (Omnidirectional Bearing Selector) pour choisir le radial auquel on souhaite se comparer
- une aiguille de déviation qui indique le résultat de la comparaison : si on se trouve à droite, à gauche ou sur le radial choisi
- derrière l'aiguille, une échelle indique l'amplitude de l'écart. Chaque point représente un écart de 2° soit une indication de 10° max de chaque côté
- un indicateur TO / FROM qui permet de savoir si on est en situation de rapprochement ou d’éloignement de la station sol
Utilisation :
- Le pilote souhaite exploitée une balise VOR indiquée par sa carte;
- Il entre la fréquence de la balise sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise (3 lettres indiquées sur la carte);
- Si le pilote souhaite intercepter un radial donné, il choisi le radial souhaité avec le bouton OBS et l'intercepte lorsque l'aiguille de déviation n'indique plus d'écart
- Si le pilote souhaite connaître le radial sur lequel il se trouve, il tourne le bouton OBS jusqu'a ce que l'aiguille de déviation n'indique plus déviation. L'indicateut TO/FROM lui permet de lever le doute entre QDR et QDM.
-
Vue aérienne d'un ensemble d'antenne d'une balise VOR de Sprimont "SPI" en Belgique
-
Le symbole du VOR sur une carte. la fréquence de la balise est 110.2MHz, DVL est son identifiant émit en morse
-
Omnidirectional Bearing Indicator. L'aiguille de déviation est au centre (5 graduations de chaque côté). L'indicateur TO/FROM indique FROM. Le radial sélectionné est le 252°.
DME
Un système DME (Distance Measuring Equipment en anglais) permet de connaître la distance oblique qui sépare un aéronef d'une station au sol en mesurant le temps que met une impulsion radioélectrique pour faire un aller-retour.
- Une station sol DME est typiquement implantée avec un VOR. On parle alors de station sol VOR/DME.
- Le DME est fonctionnellement identique au composant distance du TACAN, c'est dire qu'un utilisateur de DME peut exploiter les stations sol TACAN.
- Une station sol DME basse puissance peut être implantée avec un ILS pour mesurer la distance par rapport au seuil de piste lors d'une finale sans visibilité.
La station au sol utilise la gamme de fréquences UHF de 962 à 1 213 MHz (donc une portée optique) qui sont appariées à celles des VOR et des ILS : c'est à dire que la fréquence du DME est automatiquement sélectionnée lorsque le pilote renseigne la fréquence du VOR ou le l'ILS. A noter que c'est la distance oblique qui est mesurée, donc si l'aéronef passe à la verticale de la station sol, le DME indiquera la hauteur de l'aéronef.
l'OACI préconise une précision minimum de ±(0,25 milles nautiques + 1,25 % de la distance). Une station sol peut gérer environ 100 aéronefs. Au delà, elle ignore les aéronefs les plus loin.
Utilisation :
- Le pilote souhaite exploitée une balise VOR/DME indiquée par sa carte;
- Il entre la fréquence de la balise VOR sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise un peu plus aigüe que le code du VOR (3 lettres indiquées sur la carte);
- La distance oblique s'affiche à l'écran quelques secondes plus tard.
- Si l'aéronef est très éloigné par rapport à une station sol, il sera dans les premiers à perdre l'information si la balise devient saturée.
-
Vue d'antenne DME seule.
-
Le symbole du VOR/DME sur une carte. la fréquence du VOR 116.7MHz doit être sélectionnée pour utiliser le DME appariée, MOU est son identifiant émit en morse
-
Afficheur DME. En exploitant la variation de la distance en fonction du temps, il peut indiquer une vitesse sol radiale, et le temps restant pour atteindre la balise.
Les Radars
Radar primaire au sol
Le radar (acronyme issu de l'anglais RAdio Detection And Ranging) est un système qui utilise les ondes électromagnétiques pour détecter la présence et déterminer la position des aéronefs. Les ondes envoyées par l'émetteur sont réfléchies par la cible, et les signaux de retour (appelés écho-radar) sont captés et analysés par le récepteur. La distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne. L'altitude ne peut pas être mesurée, bien que les systèmes modernes et plus élaborés parviennent à donner une indication d'altitude.
Ce principe de Radar ne nécessite aucun instrument à bord de l'aéronef et est appelé Radar primaire. La fréquence utilisée est choisie pour être réfléchies par les aéronefs sans être (trop) perturbée par les phénomènes météo. La portée est la portée optique. Les puissances émises sont très importantes car l'onde doit faire le voyage aller, être partiellement réfléchie par l'aéronef, et faire le voyage retour.
Généralement, le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), et proche de lui (impossibilité de recevoir le signal tant que l'antenne émet). Comme le système est à portée optique, un aéronef en basse altitude masqué par un relief n'est pas visible. Ce type de radar n'est pas forcement disponible par tous les centres de contrôles.
Utilisation :
- le radar balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les échos-radar s'affichent sur l'écran du contrôleur aérien, mais le système ne donne aucune information sur ces plots radar.
- classiquement, le radar primaire ne permet pas de connaître l'altitude de l'aéronef
-
Principe du radar primaire.
-
Antenne du radar primaire, dans un couple radar primaire + radar secondaire.
-
Type d'écran de radar primaire non filtré avec tous les échos-radar parasites.
Radar de surveillance secondaire
Le radar secondaire (ou SSR pour Secondary Surveillance RADAR en anglais), est un dispositif radar de contrôle aérien qui « interroge » les aéronefs équipés d'un transpondeurs qui sont à sa portée. Les transpondeurs interrogés répondent au radar en envoyant le code à 4 chiffre entré par le pilote (ce code est communiqué par le contrôle aérien par radio). Les réponses des avions sont captées et analysées par le récepteur. Comme pour le radar primaire, la distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne, et l'altitude ne peut pas être mesurée. L’intérêt du radar secondaire est que chaque plot radar est identifié par le code à 4 chiffres permettant au contrôle aérien d'identifier sans ambiguïté qui est qui.
Pour être visible du contrôle aérien, il est impératif d'avoir un transpondeur en fonctionnement à bord de l'aéronef. La fréquence utilisée est de 1030MHz (interrogations radar sol) et 1090MHz (réponse du transpondeur). La portée est la portée optique (donc un aéronef en basse altitude masqué par un relief n'est pas visible). Les puissances émises sont moins importantes qu'un radar primaire car l'onde ne doit faire que le voyage aller. Le voyage retour est fait l'onde émise par le transpondeur.
Le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), ou proche de lui (technologie de Suppression des Lobes Secondaires) mais la zone est généralement couverte par une antenne voisine. Il a été constaté qu'un planeur en spirale peut temporairement disparaitre des écrans radar.
Les technologies de radar secondaire ont évolué au fil du temps :
- Le mode A : Le mode le plus basique. Le transpondeur répond avec le code SSR composé de 4 chiffres de 0 à 7.
- Le mode C : Le transpondeur répond avec le code SSR + l'altitude pression à laquelle se trouve l'aéronef. Sur l'écran du contrôleur, le plot radar apparait avec le code et l'altitude, permettant une gestion fine de la circulation aérienne.
- Le mode S : Le transpondeur répond avec le code SSR + l'altitude + l'immatriculation + d'autres informations...Sur l'écran du contrôleur, le plot radar apparait avec l'immatriculation et l'altitude. Ce mode permet au contrôleur une meilleure réactivité et de donner le même code SSR à plusieurs aéronefs.
En France en 2020, le radar secondaire mode S est disponible dans une majorité de centres de contrôles.
Lors d'un vol sans service ATS, le pilote peut mettre un code de sa propre initiative afin de transmettre un message particulier :
| Liste des codes SSR à connaître | |
|---|---|
| Code | Signification |
| 7000 | Code à utiliser France en l'absence de d'ATS, pour transmettre sa position et améliorer la sécurité. Obligatoire, sauf pour les aéronefs à autonomie électrique limitée (planeurs pur, ballons...) |
| 7500 | Code pour signifier une intervention illicite (détournement...) |
| 7600 | Code pour signifier une panne des moyens de communication radio |
| 7700 | Code pour signifier une situation d'urgence ou d'interception |
Aussi, le système TCAS (implanté généralement à bord des aéronefs de tailles moyennes) interrogent les transpondeurs de tous les autres aéronefs dans un rayon de quelques dizaines de kilomètres. La position des autres aéronefs est connu, permettant de prévenir les collisions.
- le pilote affiche le code 7000, ou un code donné par l'ATS par radio.
- le radar secondaire balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les réponses des transpondeurs s'affichent sur l'écran du contrôleur aérien. En fonction du Mode (A, C ou S), plus ou moins d'informations apparaissent à côté du plot radar.
- Le contrôleur peut demander à un pilote de mettre Transpondeur IDENT. Le pilote doit appuyer sur le bouton IDENT.
- Le plot radar apparait alors en surbrillance pendant quelques minutes, pour aider l'identification par le contrôleur.
-
Antenne du radar secondaire, dans un couple radar primaire + radar secondaire.
-
transpondeur à bord. Code actif 7000 (en haut), mode A + C + S. Noter le bouton Ident en haut à droite.
-
Type d'écran de radar secondaire. Aéronef 1 : mode C, Alt. 700ft, 70kt. Aéronef 2 : mode S, alt. 2600ft, 70kt. Aéronef 3 : mode S, alt. 200ft, 100kt.
Modèle en boucle détecté : 9-9 Navigation par satellite (motoplaneurs) Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Exercices
Ces documents sont disponibles afin de stimuler l'apprentissage par d'autres moyens que la simple lecture. Chacun est libre de les utiliser comme il l'entend: en autonomie, dans le cadre d'un devoir donné par un ATO/DTO, en TP lors de cours en DTO...etc. Wiki-SPL.net propose le contenu mais n'a pas vocation à répondre aux demandes d'aides à l'apprentissage. Ce rôle est assuré par les formateurs des ATO/DTO dont il faudra se rapprocher !
- Cahier d’exercices N°1 Document à imprimer. Prévoir un matériel basique (règle, crayon, rapporteur...).
La navigation par satellite est une technique de navigation basé sur système de positionnement par satellites.
Un système de positionnement par satellites (ou GNSS pour Global Navigation Satellite System en anglais) est un ensemble de composants reposant sur une constellation de satellites artificiels permettant de déterminer sa position 3D, sa vitesse 3D et l'heure grâce à un récepteur portable de petite taille. Cette catégorie de système de géopositionnement a pour avantage une précision de l'ordre de 5 à 15 mètres, une couverture quasi-mondiale. A l’inverse, le type d'onde utilisée rend le système sensible aux obstacles présents entre le terminal récepteur et les satellites (immeubles, montagnes...).
En plus de cet ensemble, certains systèmes d'augmentation et de fiabilisation permettent de fiabiliser le système et d'améliorer les performances à une précision de quelques mètres (DGPS, EGNOS, Assisted GPS...).
Mise en œuvre
Le système GPS (le système développé par les États-Unis) repose sur une constellation d'une trentaine de satellites qui permet à un utilisateur, situé sur n'importe quel point du globe, d'avoir toujours au minimum quatre satellites à portée (dans l'hypothèse d'un environnement dégagé d'obstacles dit « clear sky »). Le terminal de l'utilisateur calcule sa position grâce au signal émis par chacun des satellites. À ce stade, la communication est mono-directionnelle, c'est-à-dire que le terminal de l'utilisateur ne fait que recevoir les signaux.
| Informations disponibles sur le récepteur en fonction du nombre de satellites en vue | |
|---|---|
| 2 satellites | Date et heure |
| 3 satellites | Date et heure + position horizontale (latitude et longitude) |
| 4 satellites et + | Date et heure + position horizontale + position verticale (altitude) |
Avantages
- Le système GNSS permet de se positionner très rapidement directement sur une carte.
- De nombreuses fonctions des récepteurs permettent aussi de programmer la route suivie: dans la navigation aérienne sous forme de points tournants pour faciliter le travail du pilote.
- En planeur, le récepteur peut calculer des plans de finesses pour rejoindre les aérodromes proches.
Inconvénients
- Il faut être très attentif au « système de coordonnées » utilisé, et bien régler le récepteur afin qu'il fournisse les coordonnées dans le système de référence utilisé actuellement en aéronautique : Le système WGS 84.
- L'utilisation de cette technique nécessite la présence « d'électricité » à bord (panne du système si manque d'énergie à bord, particulièrement pour les planeurs)
Le système GPS des États-Unis était le premier en service. Depuis, ces systèmes sont disponibles :
-
Antenne d'un récepteur GNSS, environ 3cm de côté. Elle doit avoir une vue dégagée vers le ciel.
-
Coordonnées de Latitude et Longitude données par un récepteur GNSS d'ancienne génération (sans carte)
-
Récepteurs GNSS à bord d'un planeur avec affichage sur carte interactive (au centre).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation aérienne est l'ensemble des techniques permettant à un pilote d'aéronef de maîtriser ses déplacements. La navigation permet à l'aéronef de suivre une trajectoire appelée route.
La navigation aérienne est largement héritière de la navigation maritime et la terminologie utilisée est identique.
Aux débuts de l'aviation, les navigations se faisaient à vue. En cas de conditions de visibilité dégradées, des phares aéronautiques jalonnaient certains tronçons de routes régulièrement empruntées, comme celle de l'Aéropostale qui amenaient le courrier de la France vers l'Afrique puis l’Amérique du Sud.
Au cours de la seconde moitié du XXe siècle, s’est développée la radionavigation. Au début du XXIe siècle, la navigation aérienne utilise largement le GPS.
Définitions
Le système solaire
Les variations saisonnières de la position du soleil sont créées par l'inclinaison de l'axe de rotation de la Terre par rapport au plan de son orbite autour du Soleil (écliptique). Pour un observateur terrestre, tout au long de l'année, le Soleil, bien que fixe, semble avoir une trajectoire différente dans le ciel. L'été est la saison où la journée dure le plus longtemps et le soleil monte le plus haut dans le ciel.
-
Alternance des saisons sur une année.
-
Mouvement apparent du soleil durant la journée pour un observateur situé dans l'hémisphère nord, en France
Se repérer sur la Terre
Afin de se repérer sur la sphère terrestre, la sphère est quadrillée par :
- Des Parallèles. Lorsqu'on se déplace vers le Nord ou le Sud (en restant sur le même méridien), on change de parallèle. Les Parallèles sont numérotés en degrés (0° étant l'équateur) plus une indication Nord ou Sud. le pôle Nord est numéroté 90°N. Paris se situe au niveau du parallèle 48,8°N. Il s'agit de la coordonnée de Latitude
- Des Méridiens. Lorsqu'on se déplace vers l'Ouest ou l'Est (en restant sur le même parallèle), on change de méridien. Les méridiens sont numérotés en degrés (0° étant le méridien passant par l'observatoire royal de Greenwich) plus une indication Ouest ou Est. Paris se situe au niveau du méridien 2,3°E. Il s'agit de la coordonnée de Longitude
-
Principaux parallèles, permettant de mesurer la Latitude et Principaux méridiens, permettant de mesurer la Longitude
Les coordonnées peuvent être exprimées de deux manières :
- Expression en degrés et décimale : La tour Eiffel à Paris se situe exactement aux coordonnées 48.8582N, 2.2945E
- Expression en degrés, minutes et secondes : parfois noté « DMS ». Chaque degré est divisé en 60minutes (1°=60'), puis chaque minute et divisé en 60secondes (1'=60"). La tour Eiffel se situe exactement aux coordonnées 48°51'29"N, 2°17'40"E
Les parallèles et les méridiens sont des arcs de cercles. Il est possible de les classer en 2 catégories :
- Ceux qui sont dit Grand cercles : l'arc de cercle à pour centre le centre de la terre, sont rayon est toujours égal à celui de la terre. Tous les méridiens sont des grand cercles. L'équateur est aussi un grand cercle.
- Ceux qui sont dit Petit cercles : tous les autres cercles n'ayant pas pour centre le centre de la terre. Mis a part l'équateur, tous les parallèles sont des petits cercles.
L'intérêt de cette classification est l'exploitation des Grands Cercles : leur périmètre est toujours égal au périmètre de la terre, c'est à dire environ 40 000km. Par exemple, tout déplacement de 0°01'00" en coordonnés le long d'un grand cercle fera toujours la même distance :
la longueur d'une minute d'arc (0°01'00") au niveau d'un grand cercle est la définition d'un Mille marin (nautique miles en anglais, noté NM). Cette astucieuse définition permet de calculer rapidement la distance qui sépare deux coordonnées. En ignorant les secondes d'arc, la distance entre la tour Eiffel (48°51'N, 2°17'E) et la tour de Pize (43°43'N, 10°23'E) est 05°08' sur l'axe Nord/Sud (soit 308NM).
Le temps
Le temps est une notion indispensable en navigation. Les divisions qui permettent de mesurer le temps sont faciles à appréhender et universelles : l'année, le jour, l'heure, la minute...etc. Le point de référence est beaucoup plus délicat car il en existe un certain nombre :
- LMT, Local Mean Time en anglais. C'est l'heure qui a pour référence le soleil. Lorsque le soleil est au zénith, la montre est réglée à 12h00. Cette référence dépend donc de la position géographique. Chaque endroit possède son heure LMT. Ce système est peu pratique et n'est quasiment plus utilisé aujourd'hui.
- Heures légales. Il s'agit d'une heure de référence pour un large territoire afin de résoudre les problèmes posés par l'heure LMT. Ce sont notamment les fuseaux horaires : la terre est décomposé en 24 fuseaux de 60minutes chacun qui possèdent tous leur propre heure légale de référence.
- UTC, Universal Time Coordinated en anglais. C'est une heure de référence mondiale, qui a pour référence le méridien d'origine 0°(Greenwich). A 12h UTC, le soleil est au zénith à Greenwich, mais il fait nuit dans l'Océan Pacifique. Les dénominations heure GMT] ou heure TU peuvent être considérées identique à l'heure UTC. Cette explication est en fait approximative mais suffisante pour le pilote planeur.
En aéronautique, les heures sont souvent définies en heure UTC car il est plus facile d’œuvrer avec une seule référence quelque soit le lieu ou le moment. Pour que le pilote puisse utiliser sa montre réglée en heure locale, il faudra ajouté l'écart entre l'heure UTC et son heure légale. En France, le décalage par rapport à l'heure UTC est : UTC+1 en hiver et UTC+2 en été.
La ligne de changement de date est une ligne imaginaire, à la surface de la Terre, approximativement située au 180e méridien (est et ouest) dans l'océan Pacifique ; son rôle est d'indiquer l'endroit où il est nécessaire de changer de date quand on la traverse. Les pilotes planeur européen sont peu concerné par cette notion.
Afin de définir les heures auxquelles la luminosité est suffisante pour entreprendre un vol VFR de jour, il est nécessaire de définir :
- le lever du soleil, SunRise en anglais (SR) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le matin.
- Le coucher du soleil, SunSet en anglais (SS) : Il s'agit de l'heure à laquelle le centre du soleil passe l'horizon le soir.
- le crépuscule civil : C'est la période où le centre du Soleil est situé à moins de 6° sous la ligne d'horizon.
La journée aéronautique durant laquelle le vol VFR de jour est possible commence au début du crépuscule avant le lever du soleil et se termine à la fin du crépuscule après le coucher du soleil. Aux latitudes moyennes (30 à 60°) cette définition est souvent simplifié, la journée aéronautique commence à SR-30min et se termine à SS+30min
Les directions
Afin de donner une direction, les points cardinaux sont utilisés. Pour un degré de précision plus important dans l'expression d'une direction, un angle est exprimé en prenant le Nord comme référence.
-
Rose des vents, indiquant les points cardinaux.
-
Rapporteur permettant d'exprimer une direction par un angle.
Les Distances
Les distances horizontales sont exprimées en Mille marin ou en kilomètres.
- Pour convertir rapidement des Nautiques Miles en kilomètres par calcul mental, une bonne approximation (erreur de 3%) est : prendre le double (x2), et retirer 1/10e.
Les distances verticales sont exprimées en Pied ou en Mètre.
- Pour convertir rapidement des Pieds en Mètres par calcul mental, une bonne approximation (erreur de 1.5%) est : multiplier par dix (x10), diviser par trois (/3).
- Pour convertir rapidement des Mètres en Pieds par calcul mental, une bonne approximation (erreur de 1.5%) est : diviser par dix (/10), multiplier par trois (x3).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Magnétisme et compas
Le compas est un instrument de bord permettant de mesurer la direction en utilisant le champ magnétique terrestre. Son fonctionnement est similaire à celui d'une boussole. C'est un instrument simple, mais les limitations de la mesure grâce au champ magnétique sont multiples :
- Le champ magnétique terrestre n'est pas aligné avec l'axe de rotation de la terre. Le compas indique les directions par rapport à la direction du pôle Nord magnétique, qui n'est pas au même endroit que le pôle Nord géographique. On dit que la différence entre les deux directions magnétiques et géographiques est la déclinaison magnétique.
-
Déclinaison magnétique. Le compas indique le pôle Nord magnétique.
- Le Nord magnétique bouge notablement en 6 à 12mois. La déclinaison doit être mise à jour régulièrement. Des cartes spécifiques présentent la déclinaison en fonction de chaque position sur terre. Les lignes qui joignent les endroits d'égale déclinaison sont appelées lignes isogones. En France et à notre époque, par chance, la déclinaison est négligeable (proche de 0°).
-
Évolution de la déclinaison entre 1590 et 1990 en fonction de la position sur la Terre, par représentation des lignes isogones. Cliquer pour voir l'animation.
-
Lignes d'égale déclinaisons magnétiques (les isogones) en France en 2020 (en orange clair). Service de l’Information Aéronautique - Données originales téléchargées sur https://www.sia.aviation-civile.gouv.fr, mise à jour du 26 mars 2020.
- Le compas est instrument imparfait. Il n'indique pas parfaitement le Nord magnétique. Ceci est dû au compas lui-même mais aussi à l'installation dans l'aéronef. On dit que cette erreur est la déviation. Cette erreur dépend de la direction qu'il indique. Une table de correction est disponible à proximité immédiate du compas.
-
Courbe de déviation en fonction des directions mesurées pour un compas maritime.
-
Le cap compas indiqué est de 45°. La déviation indiquée par la table (en rouge) est entre -2° et -5°. Le cap magnétique est donc de l'ordre de 42°.
Afin d'obtenir la vrai direction, les erreurs de déclinaison et déviation doivent être retirées par calcul :
-
Correction de la déviation et de la déclinaison après lecture du cap compas. Dans l'autre sens, procéder aux correction en inversant le signe.
Le compas mesure la direction du champ magnétique là où il se trouve. Tout éléments qui génère un champ magnétique peut l'influencer, il en résultera une indication de direction très erronée. Le pilote doit prendre les précautions nécessaires pour garantir la bonne indication du compas :
- un aimant placé à proximité d'un compas : des aimants sont présents dans les casques utilisé dans les aéronefs, les téléphones...
- les systèmes électriques de l'aéronef génèrent divers champs magnétiques dû à la circulation du courant électriques dans les câbles. Le fonctionnement de certaines servitudes électriques peut donc influencer le compas.
- les masses métalliques ferromagnétiques, même sans être des aimants, posent problèmes. Un stylo qui possède un corps métallique à proximité immédiate d'un compas rend son indication fausse.
Enfin, le compas indique une valeur correcte en ligne droite en l'absence de turbulence importante. Il ne faut pas prendre en compte l'indication d'un compas :
- lors d'un virage;
- lors de turbulences importantes.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Cartes
Une carte présente des informations en fonction de la position considérée. En aéronautique, ces informations concernent les repères visibles, les angles, les distances, les informations sur l'espace aérien...etc. Il est nécessaire d'appréhender les codes de conception et de lecture des cartes pour une utilisation correcte.
Le type de projection cartographique
La projection cartographique est un ensemble de techniques permettant de représenter une surface non plane (surface de la Terre, d'un autre corps céleste, du ciel, ...) dans son ensemble ou en partie sur la surface plane d'une carte. L'impossibilité de projeter le globe terrestre sur une surface plane sans distorsion explique que diverses projections aient été inventées, chacune ayant ses avantages :
- La projection de Mercator : C'est une projection cylindrique. Les méridiens et les parallèles sont des droites perpandiculaires qui quadrillent le plan. Cette projection conforme conserve les angles (ce qui permet de reporter directement sur la carte les angles mesurés au compas, et vice-versa) mais ne conserve ni les distances, ni les surfaces (l'échelle de la carte variant avec la latitude). Sauf le long de l'équateur. Une ligne droite sur une carte de Mercator ne représente pas la distance la plus courte en réalité. C'est en revanche une ligne d'azimut constant (c'est-à-dire une loxodromie), particulièrement utile pour naviguer à cap constant, même si le trajet ainsi défini n'est généralement pas sur un grand cercle et n'est donc pas le chemin le plus court.
-
Projection cylindrique projection Mercator.
-
Exemple de projection cylindrique avec déformation des distances importante au niveau des pôles.
- La projection conique conforme de Lambert : C'est une projection conique. Les méridiens sont des droites convergentes en un point, les parallèles sont des cercles concentriques autour de ce même point. Elle conserve également les angles. Elle conserve les distances sur le parallèle de référence. Il est donc particulièrement intéressant d'utiliser une projection de Lambert ayant son parallèle de référence sur la zone à exploiter. A proximité du parallèle de référence, une ligne droite sur une projection de Lambert représente la distance la plus courte en réalité (c'est-à-dire une orthodromie).
-
Projection conique type projection de Lambert.
-
Exemple de projection conique.
Les cartes utilisées par le pilote planeur
- La carte permet de représenter les éléments visibles au sol. En France, l'IGN fourni diverses cartes. Ces cartes sont par exemple disponibles en version numérique sur la plateforme Géoportail. L'expérience montre que pour un vol en planeur, une carte avec représentation schématique des éléments facilement identifiables en vol est la plus adaptée.
- La carte permet également de présenter sous forme graphique une partie des informations aéronautiques présentes dans les AIP (Aeronautical Information Publication en anglais) : aérodromes, espaces aériens, fréquences radio, systèmes de radionavigation...etc
Divers organismes proposent des cartes spécifiques à l'usage aéronautique pour différents besoins. En France, c'est principalement le SIA (Service de l'Information Aéronautique) qui éditer les cartes. En partant de la plus grande échelle, les cartes régulièrement utilisées pour le vol en planeur sont :
- La carte du SIA au 1/1 000 000ème : utilisée principalement pour de la radionavigation en route. Elle couvre l'espace du sol au FL195. Disponible en version numérique sur le site web du SIA
- La carte du SIA au 1/500 000ème : utilisée principalement pour de la navigation en route en vol à vue. Elle couvre l'espace du sol au FL115 (ou 3000ft ASFC, le plus élevé des deux). Disponible en version numérique sur Géoportail.
- Les cartes VAC (Visual Approach Chart en anglais) : Il s'agit d'une présentation de l'aérodrome dans son environnement. On y trouve une carte détaillée de l'aérodrome, le sens du tour de piste, ainsi que d'autres indications utiles pour y atterrir en vol à vue. Disponible en version nuémrique sur le site web du SIA
- D'autres types de cartes qui émanent d’initiatives privées ou associative pour répondre à un usage particulier.
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Carte VAC de Chalons Vatry. Source SIA
Les cartes aéronautiques sont réalisées selon un cahier des charges précis définie par l'annexe 4 de l'OACI. Cette annexe est disponible en lecture sur la librairie électronique de l'OACI. Les cartes sont mises à jour régulièrement, tous les 6 ou 12 mois.
La légende de la carte du SIA au 1/500 000ème (version 2021 disponible ici) est disponible sur Géoportail (icône "information de la couche > afficher la légende). Les symboles principaux doivent être connus du pilote de planeur. liste non-exhaustive :
- Aérodrome avec bande en herbe ou piste en dur
- Les chiffres simples sans décimales indiquent des altitudes
- Les chiffres entre parenthèses indiquent des hauteurs
- Les chiffres à trois décimales indiquent des fréquences VHF pour la radiocommunication
-
Carte au 1/500 000ème du SIA autour de Chalons Vatry. Source Géoportail.
-
Symboles détaillant les aérodromes
-
Symboles détaillant les villes et rappelant les règles de survol
Exploitation des cartes
De la carte à la réalité : Mesure de la direction et de la distance
- La direction se mesure grâce à un rapporteur. L'objectif est de mesurer l'angle que forme la route avec le méridien le plus proche. Une route à l'Est vaut 90°, au Sud 180°, à l'Ouest 270°. Une prudence particulière doit être prise pour ne pas confondre le sens de la route, ce qui occasionnerait une erreur de 180°.
- La distance se mesure grâce à une règle graduée entre deux points. En considérant que l'erreur d'échelle est négligeable (voir anomalies dû à la projection Lambert conique), il fait multiplier la distance mesurée par l'échelle de la carte afin d'obtenir la distance réelle.
-
Mesure de la direction d'une route entre Brienne et Vatry.
-
Mesure de la distance entre Brienne et Vatry par 2 méthodes. 1) 8.6cm x 500 000 = 43.5km. 2)utiliser un méridien comme règle gradué en y reportant la longueur : 00°24'00" = 24NM = 44.5km. L'écart de 1km est peu important.
De la réalité à la carte : Tracer un relèvement et un éloignement
- Un relèvement est la détermination de l'angle que fait, dans le plan horizontal, la ligne d'un observateur (le pilote) vers un objet avec celle d'une direction de référence fixe (le Nord géographique dans le cas le plus courant). Cette angle est mesuré en vol puis reporté sur la carte.
- Un éloignement est une distance déterminée en vol entre l'aéronef et un point géographique connu. Cette distance est ensuite reportée sur la carte.
Avec au minimum 2 relèvements, ou 1 relèvement et 1 éloignement, il est possible de connaître sa position sur une carte.
-
Tracé de 2 relèvements pour déterminer sa position (ces relèvements peuvent par exemple être transmit par le contrôle aérien de chacun des aérodromes par radiogoniométrie des émissions de l'aéronef).
-
Tracé d'un relèvement et d'un éloignement (provenant par exemple d'une estimation grâce au temps de vol et à la vitesse sol).
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a trois méthodes de navigation :
Le cheminement
Cheminer consiste à utiliser les repères au sol caractéristiques et bien visibles depuis un aéronef. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps. On appelle aussi cheminement le fait de se diriger, à vue, de repères en repères situés à proximité l'un de l'autre.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
En vol, il est courant de confondre différents repères et ainsi avancer dans une mauvaise direction. A court terme, cela engendre une situation d’égarement. Pour garder une bonne conscience de la situation, le pilote doit évaluer le niveau de certitude de sa position :
- 1 à 2 repères = position peu sûre à conforter au plus vite,
- 3 à 4 repères = position fiable,
- 5 à 6 repères = position très fiable...
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct (une ligne droite) et que le cheminement n'est pas possible par manque de repères (ou des repères trop éloignés l'un de l'autre).
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères.
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon.
Pour naviguer à l'estime, les notions entre les différentes Vitesses sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées :
- La Vitesse Indiquée : En vol, l'indicateur de vitesse affiche la Vitesse Indiquée (VI ou IAS pour Indicated Air Speed en anglais). Cette indication n'est pas exacte.
- La Vitesse Conventionnelle : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument. Lorsque besoin, le manuel de vol explique la façon de déduire la Vc depuis la Vi (Vc ou CAS pour Calibrated Air Speed en anglais);
- La Vitesse Vrai : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou TAS pour True Air Speed en anglais);
- La Vitesse Propre : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp);
- La Vitesse équivalente : C'est la vitesse d'un aéronef, corrigée des effets de la compressibilité à l'altitude donnée (Ev ou EAS pour Equivalent Air Speed en anglais)
- La Vitesse sol : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou GS pour Ground Speed en anglais). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation).
-
Vent de face, la vitesse sol est plus faible.
-
Vent arrière, la vitesse sol est plus élevée.
-
les composantes d'un vent quelconque.
Pour naviguer à l'estime, il est nécessaire de connaître ces définitions :
- ETA : Estimated Time of Arrival en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé.
- la Route : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de Route vrai) ou par rapport au Nord magnétique (on parle de Route magnétique);
- le Cap : C'est la direction de la ligne de fois de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le cap compas), au Nord magnétique (le cap magnétique), ou au Nord vrai (le cap vrai).
- Le vent (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le vent effectif qui est la composante venant de face ou de l'arrière, et le vent de travers qui est la composante venant perpendiculairement à la trajectoire.
- la Dérive : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la correction de dérive ou angle de correction de dérive. En l'absence de vent de travers, le cap et la route sont identiques.
-
les composantes d'un vent quelconque.
-
La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive.
-
Après application d'un cap au vent pour créer un angle de correction de dérive.
Le computer de navigation
Un computer de navigation est une forme de règle à calcul circulaire utilisée dans l' aviation. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation.
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Durant le vol, le pilote navigue facilement grâce à la préparation menée au sol. Toutefois, il sera nécessaire d'évaluer et d'ajuster un certain nombre de paramètres, en croisière le pilote utilise des repères connus pour actualiser les éléments de navigation :
- Actualisation de la vitesse sol : Durant une ligne droite, il va être possible de déterminer sa vitesse sol réelle en fonction de la distance parcourue entre deux repères et le temps passé (chronomètre). Il est possible de corriger la vitesse sol estimée au départ.
- Actualisation de la vitesse et de la direction du vent : Grâce à la connaissance de la vitesse sol et de la dérive constatée en vol, le pilote peut en déduire la vitesse et la direction du vent (triangle des vitesse). Cet élément permet d'actualiser les corrections à apporter sur le prochain segment de navigation.
- Corrections de trajectoires : Si la route suivi n'est finalement pas la route escomptée, le pilote appliquera des corrections de trajectoire. Ces corrections permettent de revenir sur la route et sont plus ou moins forte suivant la nécessité de corriger l'écart rapidement (relief, espaces aériens, nécessité de se rapprocher d'un repère pour éviter l'égarement...)
- Révisions des ETA : L’ensemble des paramètres révisés permettent de conclure à une modification des ETA.
Pour la navigation à vue, et particulièrement la navigation à l'estime, le Journal de navigation ou Log de navigation est une technique de préparation des informations (au sol) et d'actualisation (en vol). Il s'agit d'un petit tableau regroupant les informations de navigation par ordre chronologique (points tournant, route magnétique, distance, carburant, ETA...etc). Bien que le format de base soit commun, chaque pilote peut y ajouter des informations qu'il souhaite retrouver facilement durant le vol. Ce document est créé lors de la préparation du vol et il est emmené en vol au même titre qu'une carte. Durant le vol, le pilote corrigera les informations en fonction de l'actualisation des paramètres.
-
Exemple de log de navigation complété.
-
Tracé exemple d'une navigation LFMX - Vinon - Gap sur une carte aéronautique au 1/500 000
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Utilisation du Service d'Information de Vol
Le Service d'Information de Vol, souvent appelé SIV (traduit de Flight Information Service ou FIS en anglais) est un service apporté à tout aéronef évoluant dans une Région d'information de vol (traduit de Flight Information Region ou FIR en anglais). Une FIR s'étant du sol au FL195. A l'intérieur d'une FIR, le Service d'Information de Vol peut être rendu par différentes entités, suivant l'endroit où l'aéronef évolue :
- Lorsque l'aéronef évolue dans un espace aérien contrôlé (classe d'espace E, D, C, B, A), il est rendu par les services du contrôle.
- Lorsque l'aéronef évolue en classe d'espace G, il est rendu par un centre de service de la circulation aérienne proche.
Pour l'aviation générale en France, le Service d'Information de Vol est disponible durant tout le vol. Dans le cadre du Service d'Information de Vol, l'organisme (contacté par radio) peut transmettre des renseignements (règlementation SERA, article SERA.9005):
- sur la disponibilité des services de radionavigation;
- sur les modifications de l’état des aérodromes et des installations et services connexes, y compris des renseignements sur l’état des aires de mouvement lorsque leurs caractéristiques sont modifiées par la présence de neige, de glace ou d’une épaisseur significative d’eau;
- sur les conditions météorologiques observées ou prévues aux aérodromes de départ, de destination et de dégagement;
- sur les risques de collision;
- sur les renseignements disponibles sur la circulation et les conditions météorologiques le long de la route lorsque ces conditions sont susceptibles de rendre impossible la poursuite du vol selon les règles de vol à vue ;
- sur tout autre renseignement susceptible d’avoir une incidence sur la sécurité.
- Cette liste est réduite aux informations utiles au vol en planeur.
Dès que besoin, le pilote peut bénéficier du SIV en contactant le service adéquat par radio. C'est un service gratuit, permettant d'augmenter le niveau de sécurité.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Bases de la propagation des ondes radioélectrique
Aujourd'hui, beaucoup de systèmes fonctionnent avec des ondes radioélectriques comme le téléphone sans fil ou la télévision. En aéronautique, la possibilité de transmettre des informations grâce à des ondes radioélectriques est très utile comme par exemple pour communiquer oralement, donner des informations de direction, ou encore des informations de position...etc.
Afin d'exploiter correctement ces systèmes, et surtout d'en connaître les limitations respectives, il est nécessaire d'aborder brièvement leur fonctionnement.
Caractéristiques des Antennes : Les ondes électromagnétiques sont émises par des antennes. La forme et la taille de l'antenne peut être très différent suivant :
- La fréquence de l'onde électromagnétique utilisée : Pour un même type d'antenne, plus la fréquence est élevée et plus l'antenne est petite.
- La directivité de l'antenne : Une antenne peut émettre dans toutes les directions (utile en communication radio), ou alors seulement dans une direction particulière (utile pour un radar). Toutes les antennes connaissent des "angles morts" où elles n'émettent (ou ne reçoivent) pas du tout.
- La puissance de l'onde à émettre : Une antenne de forte puissance ou prévue pour capter de très faibles signaux est généralement plus grande.
-
Antenne pour la communication VHF (118 à 137 MHz)
AJOUTER PHOTO ANTENNE Flarm, Antenne GPS, Antenne transpondeur, Antenne VOR, antenne VDF
La Propagation des ondes : Suivant la fréquence de l'onde utilisée, la propagation des ondes radio est différente. Les concepteurs des systèmes aéronautiques choisissent la fréquence la plus adaptée au besoin du système. Les 3 types de propagation sont :
- les ondes de sol (0.03 à 0.3 MHz) : C'est lorsque l'onde se propage en suivant la courbure de la terre. Utile pour établir des communication mondiales, mais la puissance nécessaire est très importante.
- les ondes de ciel (1 à 30MHz) : C'est lorsque l'onde est capable d'être réfléchie par une couche de l'atmosphère (la ionosphère) et sur le sol, permettant par exemple d'établir des communications entre deux vallées encaissées et des communications mondiales avec plusieurs rebonds.
- les ondes directes (30MHz et plus) : C'est lorsque l'onde se propage en ligne droite, et sont arrêtées par les obstacles. C'est la portée optique. Pour établir une transmission entre un émetteur et un récepteur, il faut que ces derniers puisse se voir. Les montagnes peuvent empêcher la propagation (les bâtiments dans une moindre mesure), mais c'est surtout le fait que la terre soit ronde qui limite la portée optique. Dans le cas du franchissement de l’horizon, plus l'émetteur et le récepteur sont haut, et plus la portée optique est grande. Il est possible de calculer la portée optique avec l'altitude de l'aéronef (h) en mètre : . Il faut noter que cette formule ne prend en compte que les contraintes géométriques de la Terre. En tenant compte de l'atmosphère terrestre, la portée est légèrement plus grande.
-
La propagation par onde de sol sur la surface de la Terre.
-
La propagation par onde de ciel réfléchie entre ciel et terre.
-
La propagation par onde directe (portée optique).
La puissance de l'onde : La puissance émise par une antenne se propage et se répartie dans plusieurs directions. Au fur et à mesure que l'onde s'éloigne de son antenne, sa puissance émise se dilue sur une zone de plus en plus grande. Il est possible que pour un récepteur très éloigné, la puissance soit trop diluée (trop faible) et qu'aucun signal ne soit détecté. La portée est donc limitée par la puissance émise et par la sensibilité du récepteur. Modèle en boucle détecté : 9- Navigation (motoplaneurs)
Radiogoniométrie au sol Le principe est de déterminer la direction d'une émission radioélectrique. Au sol, ce principe est utilisé par les services de la Circulation Aérienne pour déterminer d'où provient l'onde radioélectrique de l'aéronef qui est en train de parler. Pour eux, c'est une aide importante pour comprendre la situation rapidement. Pour le pilote planeur, l'information de QDR (Relèvement magnétique en code Q) peut être obtenue sur simple demande par radio :
- Avec le QDR provenant de deux organismes de contrôles différents et une carte, il est possible d'obtenir sa position.
- Avec le QDR provenant d'un contrôleur d'aérodrome, il est possible de calculer une route pour prendre la direction de l'aérodrome (QDM en code Q). Le QDM est l’inverse du QDR (QDM = QDR +/-180°).
En France, tous les organismes de contrôle aérien disposent normalement d'un Radiogoniomètre. Dès qu'une communication radio est établie (portée optique), il est possible d'obtenir un QDR ou un QDM. Voici un exemple de demande à faire par radio :
- "Orléans info du motoplaneur F-CCUY, je suis égaré, pouvez vous me donner un QDR par rapport à l'aérodrome d'Orléans?"
- "F-CCUY de Orléans info, vous êtes dans le relèvement magnétique 145°"
- "Orléans info du F-CCUY, 145°, je vous remercie"
La précision des systèmes de radiogoniométrie moderne est bonne.
NDB/ADF (Radiocompas)
Le radiocompas est un système basé sur la radiogoniométrie. Des balises au sol placées aux points clefs des trajectoires des aéronefs émettent en permanence sur une fréquence comprise entre 190 et 1 750 kHz (en France, principalement entre 280 et 450 kHz). A bord de l'aéronef, un système de radiogoniométrie permet de mesurer l'angle entre la balise et l'axe longitudinal de l'aéronef.
- NDB : Non Directional Beacon en anglais, Balise Non Directionnelle en français. Il s'agit du nom de la balise au sol.
- ADF : Automatic Directional Finder en anglais, Radiocompas en français. Il s'agit du nom de l'instrument implanté à bord de l'aéronef.
La fréquence utilisée permet la propagation en onde de sol. La portée n'est donc pas limité par l'horizon. Seule la puissance émettrice de la balise limite la portée.
Limitations du système ADF : le signal est affecté par les conditions atmosphériques, les terrains montagneux, la réfraction côtière et les orages, notamment sur les longues distances.
Utilisation :
- Le pilote souhaite exploitée une balise indiquée par sa carte;
- Il entre la fréquence de la balise sur son radiocompas;
- Pour vérifier que la bonne balise est sélectionnée, il écoute le message en morse qu'émet la balise toute les 15 secondes (3 lettres indiquées sur la carte);
- Le radiocompas pointe en direction de la balise.
-
Antenne NDB "NKR" à Leimen-Ochsenbach, Allemagne
-
Le symbole du NDB sur une carte. la fréquence de la balise est 428KHz, CTX est son identifiant émit en morse
-
radiocompas
VOR
Un système VOR (VHF Omnidirectional Range en anglais) permet de déterminer un relèvement magnétique par rapport à une station au sol (balise émetteur VOR dont la position est connue), et donc le radial sur lequel l'aéronef est situé. Par déduction, il permet de suivre n'importe quelle route passant par la station (en rapprochement ou en éloignement de celle-ci), ou même de déterminer la position exacte de l'avion en utilisant deux balises VOR (intersection de radiaux) ou un DME (intersection d'un radial et d'un arc DME).
La station au sol utilise la gamme de fréquences VHF de 108 à 117,95 MHz (donc une portée optique). Plus intéressant que le radiocompas, le VOR est moins soumis aux perturbations extérieures, telles celle de l'ionosphère ou simplement les nuages.
L'indicateur à bord qui permet de lire les indications du VOR se nome OBI (Omnidirectional Bearing Indicator en anglais). Il est composé de plusieurs indicateurs :
- le FLAG qui permet de savoir si on reçoit ou non le signal de la station VOR
- un bouton OBS (Omnidirectional Bearing Selector) pour choisir le radial auquel on souhaite se comparer
- une aiguille de déviation qui indique le résultat de la comparaison : si on se trouve à droite, à gauche ou sur le radial choisi
- derrière l'aiguille, une échelle indique l'amplitude de l'écart. Chaque point représente un écart de 2° soit une indication de 10° max de chaque côté
- un indicateur TO / FROM qui permet de savoir si on est en situation de rapprochement ou d’éloignement de la station sol
Utilisation :
- Le pilote souhaite exploitée une balise VOR indiquée par sa carte;
- Il entre la fréquence de la balise sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise (3 lettres indiquées sur la carte);
- Si le pilote souhaite intercepter un radial donné, il choisi le radial souhaité avec le bouton OBS et l'intercepte lorsque l'aiguille de déviation n'indique plus d'écart
- Si le pilote souhaite connaître le radial sur lequel il se trouve, il tourne le bouton OBS jusqu'a ce que l'aiguille de déviation n'indique plus déviation. L'indicateut TO/FROM lui permet de lever le doute entre QDR et QDM.
-
Vue aérienne d'un ensemble d'antenne d'une balise VOR de Sprimont "SPI" en Belgique
-
Le symbole du VOR sur une carte. la fréquence de la balise est 110.2MHz, DVL est son identifiant émit en morse
-
Omnidirectional Bearing Indicator. L'aiguille de déviation est au centre (5 graduations de chaque côté). L'indicateur TO/FROM indique FROM. Le radial sélectionné est le 252°.
DME
Un système DME (Distance Measuring Equipment en anglais) permet de connaître la distance oblique qui sépare un aéronef d'une station au sol en mesurant le temps que met une impulsion radioélectrique pour faire un aller-retour.
- Une station sol DME est typiquement implantée avec un VOR. On parle alors de station sol VOR/DME.
- Le DME est fonctionnellement identique au composant distance du TACAN, c'est dire qu'un utilisateur de DME peut exploiter les stations sol TACAN.
- Une station sol DME basse puissance peut être implantée avec un ILS pour mesurer la distance par rapport au seuil de piste lors d'une finale sans visibilité.
La station au sol utilise la gamme de fréquences UHF de 962 à 1 213 MHz (donc une portée optique) qui sont appariées à celles des VOR et des ILS : c'est à dire que la fréquence du DME est automatiquement sélectionnée lorsque le pilote renseigne la fréquence du VOR ou le l'ILS. A noter que c'est la distance oblique qui est mesurée, donc si l'aéronef passe à la verticale de la station sol, le DME indiquera la hauteur de l'aéronef.
l'OACI préconise une précision minimum de ±(0,25 milles nautiques + 1,25 % de la distance). Une station sol peut gérer environ 100 aéronefs. Au delà, elle ignore les aéronefs les plus loin.
Utilisation :
- Le pilote souhaite exploitée une balise VOR/DME indiquée par sa carte;
- Il entre la fréquence de la balise VOR sur son instrument;
- Pour vérifier que la bonne balise est sélectionnée et qu'elle est opérationnelle, il écoute le message en morse qu'émet la balise un peu plus aigüe que le code du VOR (3 lettres indiquées sur la carte);
- La distance oblique s'affiche à l'écran quelques secondes plus tard.
- Si l'aéronef est très éloigné par rapport à une station sol, il sera dans les premiers à perdre l'information si la balise devient saturée.
-
Vue d'antenne DME seule.
-
Le symbole du VOR/DME sur une carte. la fréquence du VOR 116.7MHz doit être sélectionnée pour utiliser le DME appariée, MOU est son identifiant émit en morse
-
Afficheur DME. En exploitant la variation de la distance en fonction du temps, il peut indiquer une vitesse sol radiale, et le temps restant pour atteindre la balise.
Les Radars
Radar primaire au sol
Le radar (acronyme issu de l'anglais RAdio Detection And Ranging) est un système qui utilise les ondes électromagnétiques pour détecter la présence et déterminer la position des aéronefs. Les ondes envoyées par l'émetteur sont réfléchies par la cible, et les signaux de retour (appelés écho-radar) sont captés et analysés par le récepteur. La distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne. L'altitude ne peut pas être mesurée, bien que les systèmes modernes et plus élaborés parviennent à donner une indication d'altitude.
Ce principe de Radar ne nécessite aucun instrument à bord de l'aéronef et est appelé Radar primaire. La fréquence utilisée est choisie pour être réfléchies par les aéronefs sans être (trop) perturbée par les phénomènes météo. La portée est la portée optique. Les puissances émises sont très importantes car l'onde doit faire le voyage aller, être partiellement réfléchie par l'aéronef, et faire le voyage retour.
Généralement, le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), et proche de lui (impossibilité de recevoir le signal tant que l'antenne émet). Comme le système est à portée optique, un aéronef en basse altitude masqué par un relief n'est pas visible. Ce type de radar n'est pas forcement disponible par tous les centres de contrôles.
Utilisation :
- le radar balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les échos-radar s'affichent sur l'écran du contrôleur aérien, mais le système ne donne aucune information sur ces plots radar.
- classiquement, le radar primaire ne permet pas de connaître l'altitude de l'aéronef
-
Principe du radar primaire.
-
Antenne du radar primaire, dans un couple radar primaire + radar secondaire.
-
Type d'écran de radar primaire non filtré avec tous les échos-radar parasites.
Radar de surveillance secondaire
Le radar secondaire (ou SSR pour Secondary Surveillance RADAR en anglais), est un dispositif radar de contrôle aérien qui « interroge » les aéronefs équipés d'un transpondeurs qui sont à sa portée. Les transpondeurs interrogés répondent au radar en envoyant le code à 4 chiffre entré par le pilote (ce code est communiqué par le contrôle aérien par radio). Les réponses des avions sont captées et analysées par le récepteur. Comme pour le radar primaire, la distance est obtenue grâce au temps aller/retour du signal, la direction grâce à la position angulaire de l'antenne, et l'altitude ne peut pas être mesurée. L’intérêt du radar secondaire est que chaque plot radar est identifié par le code à 4 chiffres permettant au contrôle aérien d'identifier sans ambiguïté qui est qui.
Pour être visible du contrôle aérien, il est impératif d'avoir un transpondeur en fonctionnement à bord de l'aéronef. La fréquence utilisée est de 1030MHz (interrogations radar sol) et 1090MHz (réponse du transpondeur). La portée est la portée optique (donc un aéronef en basse altitude masqué par un relief n'est pas visible). Les puissances émises sont moins importantes qu'un radar primaire car l'onde ne doit faire que le voyage aller. Le voyage retour est fait l'onde émise par le transpondeur.
Le radar est aveugle au dessus de lui (l'antenne n’émet pas verticalement), ou proche de lui (technologie de Suppression des Lobes Secondaires) mais la zone est généralement couverte par une antenne voisine. Il a été constaté qu'un planeur en spirale peut temporairement disparaitre des écrans radar.
Les technologies de radar secondaire ont évolué au fil du temps :
- Le mode A : Le mode le plus basique. Le transpondeur répond avec le code SSR composé de 4 chiffres de 0 à 7.
- Le mode C : Le transpondeur répond avec le code SSR + l'altitude pression à laquelle se trouve l'aéronef. Sur l'écran du contrôleur, le plot radar apparait avec le code et l'altitude, permettant une gestion fine de la circulation aérienne.
- Le mode S : Le transpondeur répond avec le code SSR + l'altitude + l'immatriculation + d'autres informations...Sur l'écran du contrôleur, le plot radar apparait avec l'immatriculation et l'altitude. Ce mode permet au contrôleur une meilleure réactivité et de donner le même code SSR à plusieurs aéronefs.
En France en 2020, le radar secondaire mode S est disponible dans une majorité de centres de contrôles.
Lors d'un vol sans service ATS, le pilote peut mettre un code de sa propre initiative afin de transmettre un message particulier :
| Liste des codes SSR à connaître | |
|---|---|
| Code | Signification |
| 7000 | Code à utiliser France en l'absence de d'ATS, pour transmettre sa position et améliorer la sécurité. Obligatoire, sauf pour les aéronefs à autonomie électrique limitée (planeurs pur, ballons...) |
| 7500 | Code pour signifier une intervention illicite (détournement...) |
| 7600 | Code pour signifier une panne des moyens de communication radio |
| 7700 | Code pour signifier une situation d'urgence ou d'interception |
Aussi, le système TCAS (implanté généralement à bord des aéronefs de tailles moyennes) interrogent les transpondeurs de tous les autres aéronefs dans un rayon de quelques dizaines de kilomètres. La position des autres aéronefs est connu, permettant de prévenir les collisions.
- le pilote affiche le code 7000, ou un code donné par l'ATS par radio.
- le radar secondaire balaye le ciel autour de lui grâce à la rotation de l'antenne.
- les réponses des transpondeurs s'affichent sur l'écran du contrôleur aérien. En fonction du Mode (A, C ou S), plus ou moins d'informations apparaissent à côté du plot radar.
- Le contrôleur peut demander à un pilote de mettre Transpondeur IDENT. Le pilote doit appuyer sur le bouton IDENT.
- Le plot radar apparait alors en surbrillance pendant quelques minutes, pour aider l'identification par le contrôleur.
-
Antenne du radar secondaire, dans un couple radar primaire + radar secondaire.
-
transpondeur à bord. Code actif 7000 (en haut), mode A + C + S. Noter le bouton Ident en haut à droite.
-
Type d'écran de radar secondaire. Aéronef 1 : mode C, Alt. 700ft, 70kt. Aéronef 2 : mode S, alt. 2600ft, 70kt. Aéronef 3 : mode S, alt. 200ft, 100kt.
Modèle en boucle détecté : 9- Navigation (motoplaneurs)
La navigation par satellite est une technique de navigation basé sur système de positionnement par satellites.
Un système de positionnement par satellites (ou GNSS pour Global Navigation Satellite System en anglais) est un ensemble de composants reposant sur une constellation de satellites artificiels permettant de déterminer sa position 3D, sa vitesse 3D et l'heure grâce à un récepteur portable de petite taille. Cette catégorie de système de géopositionnement a pour avantage une précision de l'ordre de 5 à 15 mètres, une couverture quasi-mondiale. A l’inverse, le type d'onde utilisée rend le système sensible aux obstacles présents entre le terminal récepteur et les satellites (immeubles, montagnes...).
En plus de cet ensemble, certains systèmes d'augmentation et de fiabilisation permettent de fiabiliser le système et d'améliorer les performances à une précision de quelques mètres (DGPS, EGNOS, Assisted GPS...).
Mise en œuvre
Le système GPS (le système développé par les États-Unis) repose sur une constellation d'une trentaine de satellites qui permet à un utilisateur, situé sur n'importe quel point du globe, d'avoir toujours au minimum quatre satellites à portée (dans l'hypothèse d'un environnement dégagé d'obstacles dit « clear sky »). Le terminal de l'utilisateur calcule sa position grâce au signal émis par chacun des satellites. À ce stade, la communication est mono-directionnelle, c'est-à-dire que le terminal de l'utilisateur ne fait que recevoir les signaux.
| Informations disponibles sur le récepteur en fonction du nombre de satellites en vue | |
|---|---|
| 2 satellites | Date et heure |
| 3 satellites | Date et heure + position horizontale (latitude et longitude) |
| 4 satellites et + | Date et heure + position horizontale + position verticale (altitude) |
Avantages
- Le système GNSS permet de se positionner très rapidement directement sur une carte.
- De nombreuses fonctions des récepteurs permettent aussi de programmer la route suivie: dans la navigation aérienne sous forme de points tournants pour faciliter le travail du pilote.
- En planeur, le récepteur peut calculer des plans de finesses pour rejoindre les aérodromes proches.
Inconvénients
- Il faut être très attentif au « système de coordonnées » utilisé, et bien régler le récepteur afin qu'il fournisse les coordonnées dans le système de référence utilisé actuellement en aéronautique : Le système WGS 84.
- L'utilisation de cette technique nécessite la présence « d'électricité » à bord (panne du système si manque d'énergie à bord, particulièrement pour les planeurs)
Le système GPS des États-Unis était le premier en service. Depuis, ces systèmes sont disponibles :
-
Antenne d'un récepteur GNSS, environ 3cm de côté. Elle doit avoir une vue dégagée vers le ciel.
-
Coordonnées de Latitude et Longitude données par un récepteur GNSS d'ancienne génération (sans carte)
-
Récepteurs GNSS à bord d'un planeur avec affichage sur carte interactive (au centre).
Modèle en boucle détecté : 9-10 Exercices (motoplaneurs)
Exercices
Ces documents sont disponibles afin de stimuler l'apprentissage par d'autres moyens que la simple lecture. Chacun est libre de les utiliser comme il l'entend: en autonomie, dans le cadre d'un devoir donné par un ATO/DTO, en TP lors de cours en DTO...etc. Wiki-SPL.net propose le contenu mais n'a pas vocation à répondre aux demandes d'aides à l'apprentissage. Ce rôle est assuré par les formateurs des ATO/DTO dont il faudra se rapprocher !
- Cahier d’exercices N°1 Document à imprimer. Prévoir un matériel basique (règle, crayon, rapporteur...).