« 9-4 Techniques de Navigation à vue (motoplaneurs) » : différence entre les versions
| Ligne 36 : | Ligne 36 : | ||
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon. | En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon. | ||
Pour naviguer à l'estime, les notions entre les différentes '''Vitesses''' sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées : | |||
*La [[wikipedia:Altitude_et_vitesse_(aéronautique)#Vitesse_indiquée_ou_Vi_ou_IAS|'''Vitesse Indiquée''']] : En vol, l'indicateur de vitesse affiche la '''Vitesse Indiquée''' (VI ou ''IAS'' pour [https://en.wikipedia.org/wiki/Indicated_airspeed ''Indicated Air Speed'' en anglais]). Cette indication n'est pas exacte. | |||
*La [[wikipedia:Altitude_et_vitesse_(aéronautique)#Vitesse_conventionnelle_ou_Vc_ou_CAS|Vitesse Conventionnelle]] : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument (Vc ou ''CAS'' pour [https://en.wikipedia.org/wiki/Calibrated_airspeed ''Calibrated Air Speed'' en anglais]); | |||
*La [[wikipedia:Altitude_et_vitesse_(aéronautique)#Vitesse_vraie_ou_Vv_ou_TAS|Vitesse Vrai]] : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou ''TAS'' pour [https://en.wikipedia.org/wiki/True_airspeed ''True Air Speed'' en anglais]); | |||
*La [[wikipedia:Altitude_et_vitesse_(aéronautique)#Vitesses|Vitesse Propre]] : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp ou ''EAS'' pour [https://en.wikipedia.org/wiki/Equivalent_airspeed ''Equivalent Air Speed'' en anglais]); | |||
*la [[wikipedia:Altitude_et_vitesse_(aéronautique)#Vitesse_sol_ou_Vs_ou_GS|'''Vitesse sol''']] : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou ''GS'' pour [https://en.wikipedia.org/wiki/Ground_speed ''Ground Speed'' en anglais]). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation). | |||
<gallery mode="packed" widths=300px heights=250px> | <gallery mode="packed" widths=300px heights=250px> | ||
| Ligne 52 : | Ligne 51 : | ||
*[[wikipedia:Route_(navigation)|'''la Route''']] : C'est la direction du chemin tracé sur la carte (la trajectoire | Pour naviguer à l'estime, il est nécessaire de connaître ces '''définitions''' : | ||
*[[wikipedia:Cap_(navigation)|'''le Cap''']] : C'est la direction de la [[wikipedia:Ligne_de_foi|ligne de fois]] de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être | *[[wikipedia:Estimated_time_of_arrival|'''ETA''']] : ''Estimated Time of Arrival'' en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé. | ||
*'''Le vent''' (force et direction) : Le vent est un élément essentiel | *[[wikipedia:Route_(navigation)|'''la Route''']] : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de '''Route vrai''') ou par rapport au Nord magnétique (on parle de '''Route magnétique'''); | ||
*'''la Dérive''' : c'est | *[[wikipedia:Cap_(navigation)|'''le Cap''']] : C'est la direction de la [[wikipedia:Ligne_de_foi|ligne de fois]] de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le [[wikipedia:Cap_(navigation)|'''cap compas''']]), au Nord magnétique (le [[wikipedia:Cap_(navigation)|'''cap magnétique''']]), ou au Nord vrai (le [[wikipedia:Cap_(navigation)|'''cap vrai''']]). | ||
*'''Le vent''' (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le '''vent effectif''' qui est la composante venant de face ou de l'arrière, et le '''vent de travers''' qui est la composante venant perpendiculairement à la trajectoire. | |||
*'''la Dérive''' : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la '''correction de dérive''' ou '''angle de correction de dérive'''. En l'absence de vent de travers, le cap et la route sont identiques. | |||
<gallery mode="packed" widths=400px heights=300px> | <gallery mode="packed" widths=400px heights=300px> | ||
| Ligne 64 : | Ligne 65 : | ||
''' Le computer de navigation ''' | |||
Un [[wikipedia:Computer_de_navigation|'''computer de navigation''']] est une forme de [[wikipedia:Règle à calcul|règle]] à calcul circulaire utilisée dans l' [[wikipedia:aviation|aviation]]. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation. | |||
Un [[wikipedia:Computer_de_navigation|'''computer de navigation''']] est une forme de [[wikipedia:Règle à calcul|règle]] à calcul circulaire utilisée dans l' [[wikipedia:aviation|aviation]]. | |||
Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation. | |||
<gallery mode="packed"> | <gallery mode="packed"> | ||
IAS,RAS,CAS to TAS airspeed conversion.png|Conversion CAS-TAS | IAS,RAS,CAS to TAS airspeed conversion.png|Conversion CAS-TAS | ||
| Ligne 82 : | Ligne 80 : | ||
Log de nav | Log de nav | ||
Tracé sur carte... | Tracé sur carte... | ||
Les formules de calcul de la prise en compte du vent sur la route | |||
=== Navigation par erreur systématique === | === Navigation par erreur systématique === | ||
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. | Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. | ||
La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère. | La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère. | ||
Version du 16 novembre 2023 à 00:09
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
La navigation à vue est pratiquée depuis les origines de l’aéronautique et reste encore le moyen le plus utilisé par l’aviation légère. Le pilote connaît sa position en cherchant au sol des repères qui figurent sur sa carte. Il suit une trajectoire en se déplaçant d’un point de repère à l’autre, en suivant un repère continu tel qu’une autoroute ou une rivière.
La navigation à vue ne nécessite aucun instrument mais elle n’est praticable que lorsque les conditions météorologiques VMC en vigueur dans la classe d'espace aérien sont réunies. Cependant, dans les espaces contrôlés, le contrôleur peut délivrer une autorisation de VFR spécial qui permet de voler hors conditions VMC.
Il y a trois méthodes de navigation :
Le cheminement
Cheminer consiste à utiliser les repères au sol caractéristiques et bien visibles depuis un aéronef. Cette méthode peut être utilisée chaque fois qu'une partie du parcours amène à longer un repère naturel ou artificiel (autoroute, rivière importante) pendant un certain temps. On appelle aussi cheminement le fait de se diriger, à vue, de repères en repères situés à proximité l'un de l'autre.
Il est important de choisir de bon repères, facilement visibles et reconnaissables, comme les fleuves, les autoroutes, les côtes, les voies ferrées importantes.
En vol, il est courant de confondre différents repères et ainsi avancer dans une mauvaise direction. A court terme, cela engendre une situation d’égarement. Pour garder une bonne conscience de la situation, le pilote doit évaluer le niveau de certitude de sa position :
- 1 à 2 repères = position peu sûre à conforter au plus vite,
- 3 à 4 repères = position fiable,
- 5 à 6 repères = position très fiable...
Le principe de l'estime est simple : connaissant une position de départ, il s'agit de déterminer le cap à prendre et l'Heure Estimée d'Arrivée (ETA - Estimated Time of Arrival) pour arriver sur un point caractéristique ou sur un aérodrome. Il peut s'agir aussi, après un temps de vol à un cap donné, de déterminer la position de l'avion.
L'estime est la technique de navigation adaptée lorsque l'on souhaite joindre deux points par le trajet le plus direct (une ligne droite) et que le cheminement n'est pas possible par manque de repères (ou des repères trop éloignés l'un de l'autre).
La méthode est la suivante : au départ, étant en possession des informations météorologiques, vous avez une estimation du vent prévu sur votre trajet. Vous pouvez donc estimer approximativement la dérive et l'afficher dès le départ. D'autre part, vous avez estimé, lors de la préparation du vol, le temps nécessaire pour parcourir la distance entre deux repères.
En pratique, on adopte une incertitudes plus ou moins importante suivant la qualité des informations (vent, précision compas...) ou la capacité du pilote à suivre les données affichées. En vol, après avoir évalué les écarts sur le premier tronçon de la navigation, une meilleure estimation pourra être faite sur le second tronçon.
Pour naviguer à l'estime, les notions entre les différentes Vitesses sont utiles. Pour le vol en motoplaneur et par approximation, seul la première définition et la dernière seront utilisées :
- La Vitesse Indiquée : En vol, l'indicateur de vitesse affiche la Vitesse Indiquée (VI ou IAS pour Indicated Air Speed en anglais). Cette indication n'est pas exacte.
- La Vitesse Conventionnelle : C'est la Vitesse indiquée corrigée des erreurs de position des sondes de pression et des erreurs d'instrument (Vc ou CAS pour Calibrated Air Speed en anglais);
- La Vitesse Vrai : C'est la Vitesse conventionnelle corrigée des écarts de pression et température par rapport au niveau de la mer (Vv ou TAS pour True Air Speed en anglais);
- La Vitesse Propre : C'est la composante horizontale de la Vitesse vrai. En vol en palier, la vitesse vrai et la vitesse propre sont égales (Vp ou EAS pour Equivalent Air Speed en anglais);
- la Vitesse sol : On applique les effets du vent sur la Vitesse Propre pour obtenir la vitesse sol (Vs ou GS pour Ground Speed en anglais). Généralement, en vol, seul les effets du vent effectif sont appliqués pour calculer la valeur de la vitesse sol (les effets du vent traversier étant ignorés par approximation).
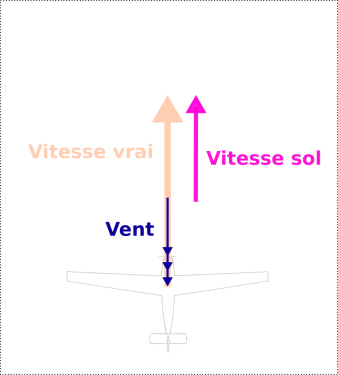
Vent de face, la vitesse sol est plus faible.
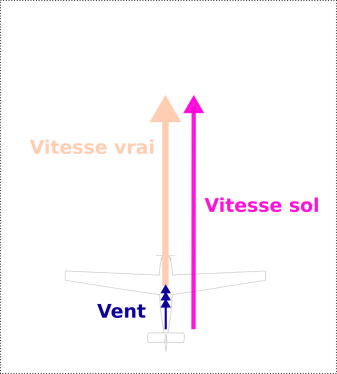
Vent arrière, la vitesse sol est plus élevée.
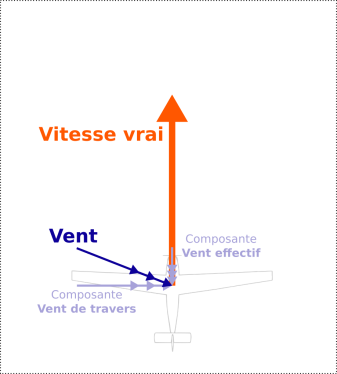
les composantes d'un vent quelconque.



Pour naviguer à l'estime, il est nécessaire de connaître ces définitions :
- ETA : Estimated Time of Arrival en anglais. C'est l'heure d'arrivée calculé grâce à la vitesse sol prévue sur le parcours envisagé.
- la Route : C'est la direction du chemin tracé sur la carte (la trajectoire sur le sol). La route se mesure en degrés par rapport au Nord vrai (on parle de Route vrai) ou par rapport au Nord magnétique (on parle de Route magnétique);
- le Cap : C'est la direction de la ligne de fois de l'aéronef (l'axe longitudinal de l'aéronef). Le cap peut être mesuré en degrés par rapport au Nord compas (Le cap compas), au Nord magnétique (le cap magnétique), ou au Nord vrai (le cap vrai).
- Le vent (force et direction) : Le vent est un élément essentiel à prendre en compte pour naviguer précisément à l'estime. On décompose l'impact du vent sur la navigation en deux parties : Le vent effectif qui est la composante venant de face ou de l'arrière, et le vent de travers qui est la composante venant perpendiculairement à la trajectoire.
- la Dérive : c'est la différence en degrés entre le cap de l'aéronef et la route suivie par l'aéronef lorsqu'il subit un vent de travers. Le pilote doit alors corriger la dérive afin de suivre la route souhaitée pour atteindre sa destination, en prenant un cap "au vent". C'est la correction de dérive ou angle de correction de dérive. En l'absence de vent de travers, le cap et la route sont identiques.
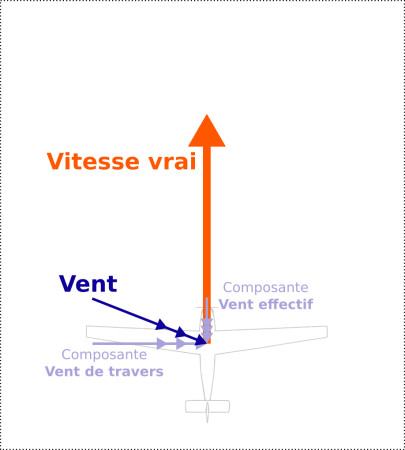
les composantes d'un vent quelconque.
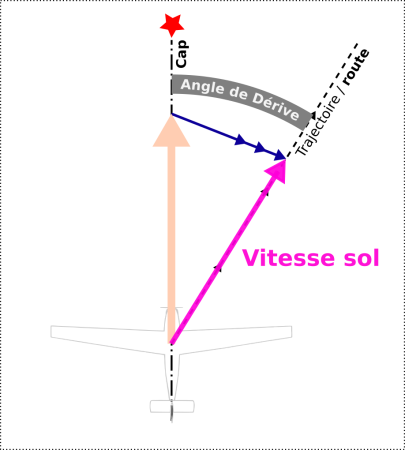
La construction du triangle des vitesses permet de connaître avec exactitude la vitesse sol et l'angle de dérive.
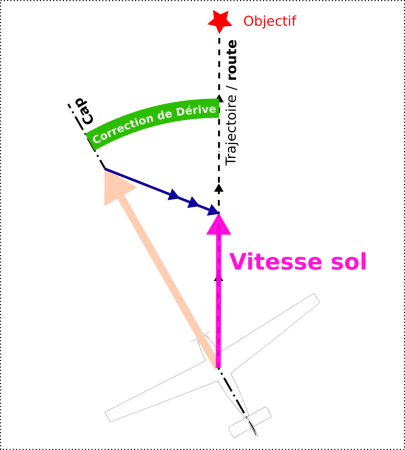
Après application d'un cap au vent pour créer un angle de correction de dérive.


Le computer de navigation
Un computer de navigation est une forme de règle à calcul circulaire utilisée dans l' aviation. Il est peu utilisé pour la pratique du vol en motoplaneur. Les détails de l'article ci-dessus permettent d'aller plus loin dans la recherche d'informations sur le computer de navigation.

Conversion CAS-TAS

Un computer de navigation E6B couramment utilisé par les élèves-pilotes.

conversion nm-km sur un computer de navigation CRP-5



Préparation et réalisation d'une navigation à l'estime
Log de nav Tracé sur carte... Les formules de calcul de la prise en compte du vent sur la route
Combinaison des deux précédentes méthodes. Elle consiste à naviguer à l'estime vers sa destination, pour rejoindre un long repère facilement identifiable où se trouve la destination (ville sur une côte maritime par exemple, sur un fleuve, etc.) puis de naviguer par cheminement avec ce repère. Pour connaître à coup sûr la direction à prendre lors de l'atteinte du repère (à droite ou à gauche?), le pilote fait une erreur volontaire durant la portion de navigation à l'estime. La valeur de l'erreur créée volontairement doit être plus grande que l'incertitude. Ainsi, même si la position précise reste incertaine, le pilote sera certain d'être à gauche ou à droite de sa route théorique. Cette unique information lui permettant de savoir s'il doit aller vers la gauche ou vers la droite lorsqu'il atteindra le repère.