« 5-4 Contrôle (motoplaneurs) » : différence entre les versions
| (3 versions intermédiaires par le même utilisateur non affichées) | |||
| Ligne 79 : | Ligne 79 : | ||
=== Compensateurs d'évolution === | === Compensateurs d'évolution === | ||
Un '''compensateur d'évolution''' est une astuce de conception permettant de démultiplier l’effort du pilote. En effet | Un '''compensateur d'évolution''' est une astuce de conception permettant de démultiplier l’effort du pilote. En effet, la surface d'une gouverne peut être trop importante pour être braquée par un pilote humain (''essayez donc d'ouvrir en grand une portière de voiture à 120km/h!!''). La conception de ces systèmes les rends transparent du point du vu du pilote, c'est complètement automatique. Le pilote n'a rien d'autre à faire que de piloter et de constater que les efforts aux commandes sont agréables! Les principaux systèmes utilisés en planeur sont : | ||
<div><ul> | <div><ul> | ||
| Ligne 88 : | Ligne 88 : | ||
=== Compensateurs de régime === | === Compensateurs de régime === | ||
Un '''compensateur de régime''' permet d'actionner une commande de manière permanente, sans effort permanent. Sur les planeurs, il en existe un uniquement sur la commande de profondeur, appelé par simplification "'''compensateur'''" ou "'''trim'''" (commande de couleur verte). Lorsque le pilote souhaite maintenir une assiette différente (longue montée en moto-planeur, longue spirale...) à la place d'une action permanente, fatigante, et difficile à maintenir précisément durant un long moment, le pilote règle le compensateur. En planeur, deux types de systèmes sont utilisés pour compenser l’effort du pilote de manière permanente sur la commande profondeur : | |||
<div><ul> | <div><ul> | ||
Dernière version du 27 septembre 2025 à 14:46

| Module 5 - Principe de vol. Cliquer pour naviguer dans les sous-pages du module : |
|---|
Contrôle
© Copyright article original par les auteur(s) de Wikipédia, adapté ici pour le vol en planeur - Cet article est sous CC BY-SA 3.0
Généralités

Les axes de rotation d'un avion forment un trièdre ayant pour origine le centre de gravité de l'aéronef comme sur l'image. On distingue donc trois axes :
- l'axe de roulis autour duquel s'incline l'avion.
- l'axe de tangage autour duquel l'assiette varie à cabrer, ou à piquer.
- l'axe de lacet autour duquel la direction, le cap de l'aéronef, varie vers la gauche ou vers la droite.
Le pilote agit sur les commandes qui actionnent les gouvernes pour modifier l'attitude de l'aéronef sur les trois axes.
- Pour obtenir un mouvement de tangage le pilote actionne le manche qui commande la gouverne de profondeur.
- Elle est située le plus loin possible de l'aile, sur l'empennage horizontal ou bien sur un plan canard.
- Pour obtenir un mouvement de roulis le pilote actionne latéralement le manche qui commande les ailerons.
- Ces gouvernes sont généralement situées le plus loin possible de l'axe de roulis, donc vers l'extrémité des ailes.
- Pour obtenir un mouvement de lacet le pilote actionne le palonnier (pédales) qui commande la gouverne de direction avec ses pieds.
- Elle est située le plus loin possible de l'axe de lacet, sur l'empennage vertical.
| Axes avion | Angle | Gouverne | Commande | Mouvement de l’avion |
|---|---|---|---|---|
| Roulis | inclinaison | Ailerons | Manche GD | 
|
| Tangage | Assiette | Profondeur | Manche Av-Ar | 
|
| Lacet | Angle de lacet | Direction | Palonnier | 
|
La plupart des aéronefs présentent un couplage en lacet-roulis : on peut commander un mouvement de roulis avec la gouverne de lacet (roulis induit). D'autre part une rotation en roulis entraîne généralement une rotation en lacet en sens inverse du virage demandé (lacet inverse).
Profondeur

A): aileron, B): manche, C): gouvernail de profondeur, D) gouvernail de direction
Lorsque le pilote actionne le manche vers l'arrière, la gouverne de profondeur se déplace vers le haut. Au niveau de l'empennage, une force vers le bas apparait et la queue de l'aéronef se baisse. L'assiette varie alors à cabrer (point de vue pilote) et dans le même temps l'incidence augmente (point de vue aérodynamique).
En plus du rôle de contrôle en tangage, la gouverne de profondeur permet d'équilibrer les forces sur l'axe longitudinal. Plus le centre de gravité est en avant, plus la force de déportance de la profondeur doit être forte. La limite de l’efficacité de la profondeur est d'ailleurs une source de la limitation du centrage maximum avant.
Direction
Lorsque le pilote actionne le palonnier vers la droite, la gouverne de direction se déplace vers la droite. Au niveau de l'empennage, une force vers la gauche apparait et la queue de l'aéronef se déplace vers la gauche. Le nez de l'aéronef va alors se déplacer vers la droite.
Dans certains aéronefs, la roulette de queue est directionnelle et reliée au palonnier. Ceci permet de diriger l'aéronef au sol de la même manière qu'en vol avec grande précision.
Ailerons

Lorsque le pilote actionne le manche vers la gauche, l'aileron gauche se lève (et l'aileron droit s'abaisse). Au niveau des ailerons, la portance diminue à gauche (l'aile descend)et augmente à droite (l'aile monte). l'aéronef s'incline vers la gauche.
Sur certains aéronefs, la commande de roulis peut également être utilisé au sol pour se prémunir des effets du vents.
Cette commande est génératrice d'un effet secondaire indésirable : l'aileron qui se baisse génère plus de trainée que l'aileron qui lève. Cette différence de trainée gauche/droite va induire une rotation autour de l'axe de lacet inverse au coté de l’inclinaison. C'est le lacet inverse
Cet effet secondaire doit être compensé avec la commande lacet (palonnier) : A chaque action latérale sur la manche, une action au palonnier doit être réalisée simultanément afin de faire disparaitre la rotation du lacet inverse. A noter que le dosage et la synchronisation requiert une certaine expérience. Il faut également bien noter que la cause du lacet inverse est le braquage du manche, dès lors que le manche est replacé au neutre, les palonniers doivent être replacé au neutre également.
Cet effet secondaire peut être atténué par quelques stratagèmes inventés par les constructeurs d'aéronefs, comme par exemple le braquage différentiel des ailerons, le déport d'axe, l'utilisation "d'ailerons frises"...
Compensateurs d'évolution
Un compensateur d'évolution est une astuce de conception permettant de démultiplier l’effort du pilote. En effet, la surface d'une gouverne peut être trop importante pour être braquée par un pilote humain (essayez donc d'ouvrir en grand une portière de voiture à 120km/h!!). La conception de ces systèmes les rends transparent du point du vu du pilote, c'est complètement automatique. Le pilote n'a rien d'autre à faire que de piloter et de constater que les efforts aux commandes sont agréables! Les principaux systèmes utilisés en planeur sont :
-

Corne débordante (SF28...) -
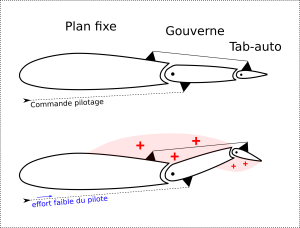
Tab automatique (ASK13...) -
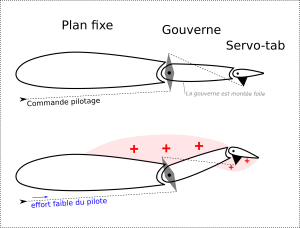
Servo tab



Compensateurs de régime
Un compensateur de régime permet d'actionner une commande de manière permanente, sans effort permanent. Sur les planeurs, il en existe un uniquement sur la commande de profondeur, appelé par simplification "compensateur" ou "trim" (commande de couleur verte). Lorsque le pilote souhaite maintenir une assiette différente (longue montée en moto-planeur, longue spirale...) à la place d'une action permanente, fatigante, et difficile à maintenir précisément durant un long moment, le pilote règle le compensateur. En planeur, deux types de systèmes sont utilisés pour compenser l’effort du pilote de manière permanente sur la commande profondeur :
-
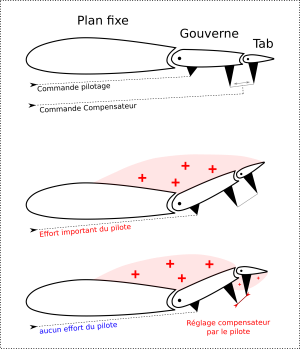
Compensateur aérodynamique. Dans le cas d'une gouverne de profondeur, l'image présente ici un réglage du compensateur à cabrer -
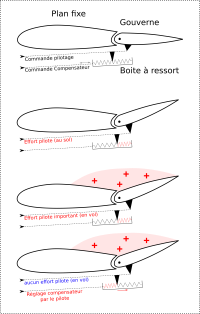
Compensateur par boite à ressort. Dans le cas d'une gouverne de profondeur, l'image présente ici un réglage du compensateur à cabrer


Sur un planeur, il est possible d'identifier le type de compensateur par la présence ou l'absence d'un tab sur la gouverne de profondeur. L'identification peut se faire également en déplaçant le compensateur au sol. Si le manche se déplace, il s'agit d'un compensateur par boite à ressort. Si le manche ne se déplace pas, il s'agit d'un compensateur aérodynamique.